
一种基于点线特征融合的视觉惯性定位方法.pdf

一条****发啊

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于点线特征融合的视觉惯性定位方法.pdf
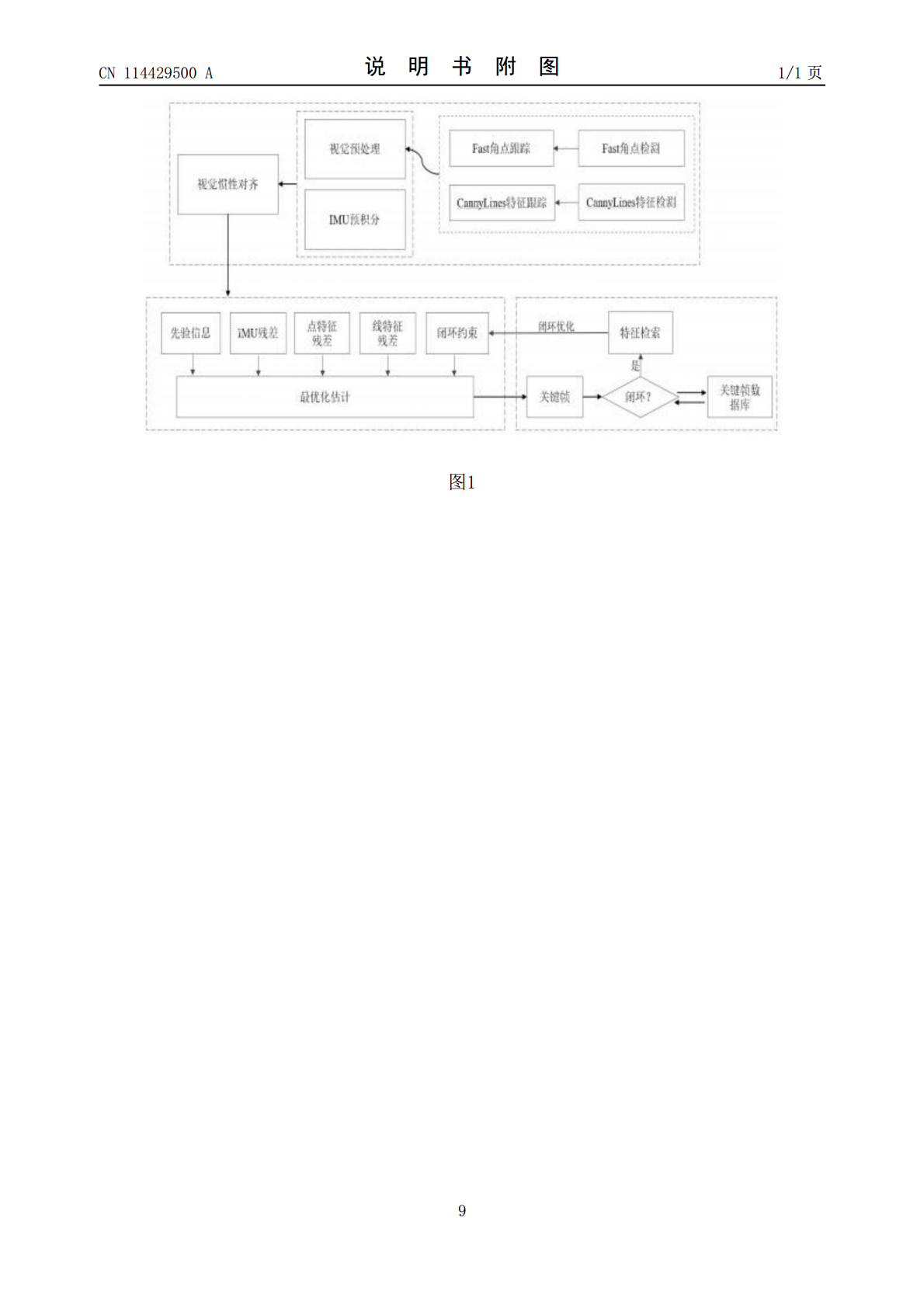
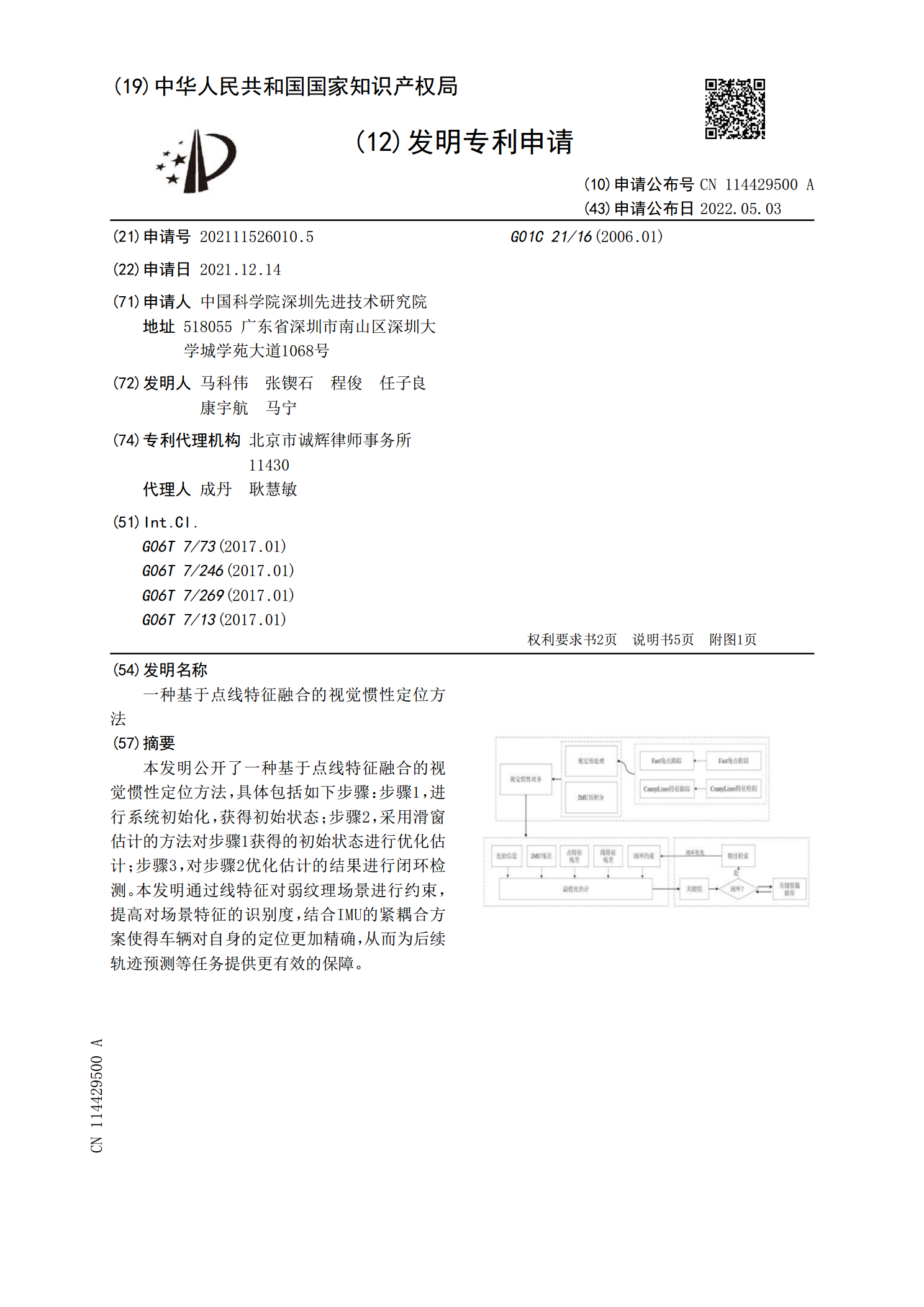
本发明公开了一种基于点线特征融合的视觉惯性定位方法,具体包括如下步骤:步骤1,进行系统初始化,获得初始状态;步骤2,采用滑窗估计的方法对步骤1获得的初始状态进行优化估计;步骤3,对步骤2优化估计的结果进行闭环检测。本发明通过线特征对弱纹理场景进行约束,提高对场景特征的识别度,结合IMU的紧耦合方案使得车辆对自身的定位更加精确,从而为后续轨迹预测等任务提供更有效的保障。
基于逆投影的多特征融合视觉定位方法.pdf
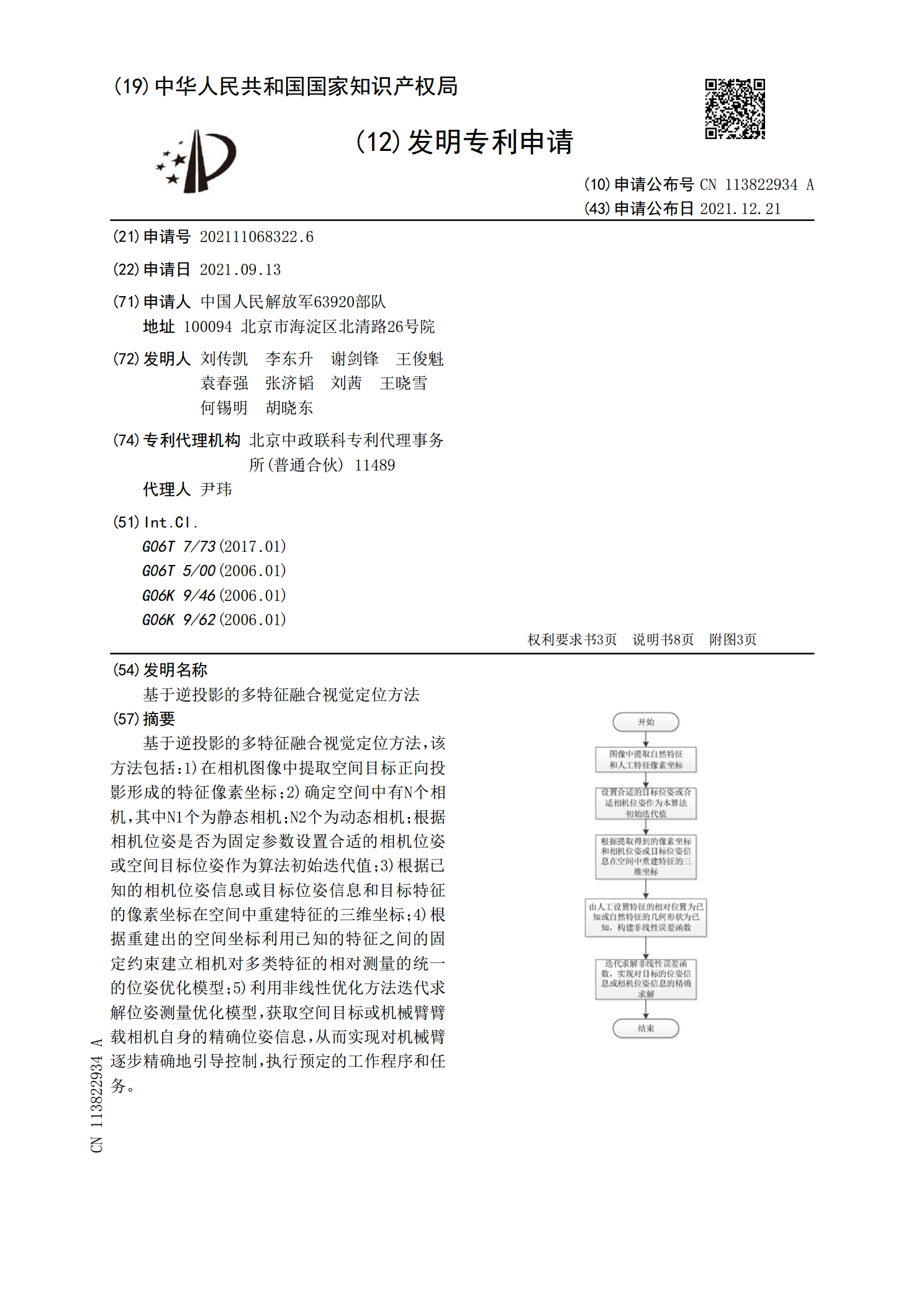
基于逆投影的多特征融合视觉定位方法,该方法包括:1)在相机图像中提取空间目标正向投影形成的特征像素坐标;2)确定空间中有N个相机,其中N1个为静态相机;N2个为动态相机;根据相机位姿是否为固定参数设置合适的相机位姿或空间目标位姿作为算法初始迭代值;3)根据已知的相机位姿信息或目标位姿信息和目标特征的像素坐标在空间中重建特征的三维坐标;4)根据重建出的空间坐标利用已知的特征之间的固定约束建立相机对多类特征的相对测量的统一的位姿优化模型;5)利用非线性优化方法迭代求解位姿测量优化模型,获取空间目标或机械臂臂载
基于视觉惯性融合的四旋翼飞行器定位方法.pdf
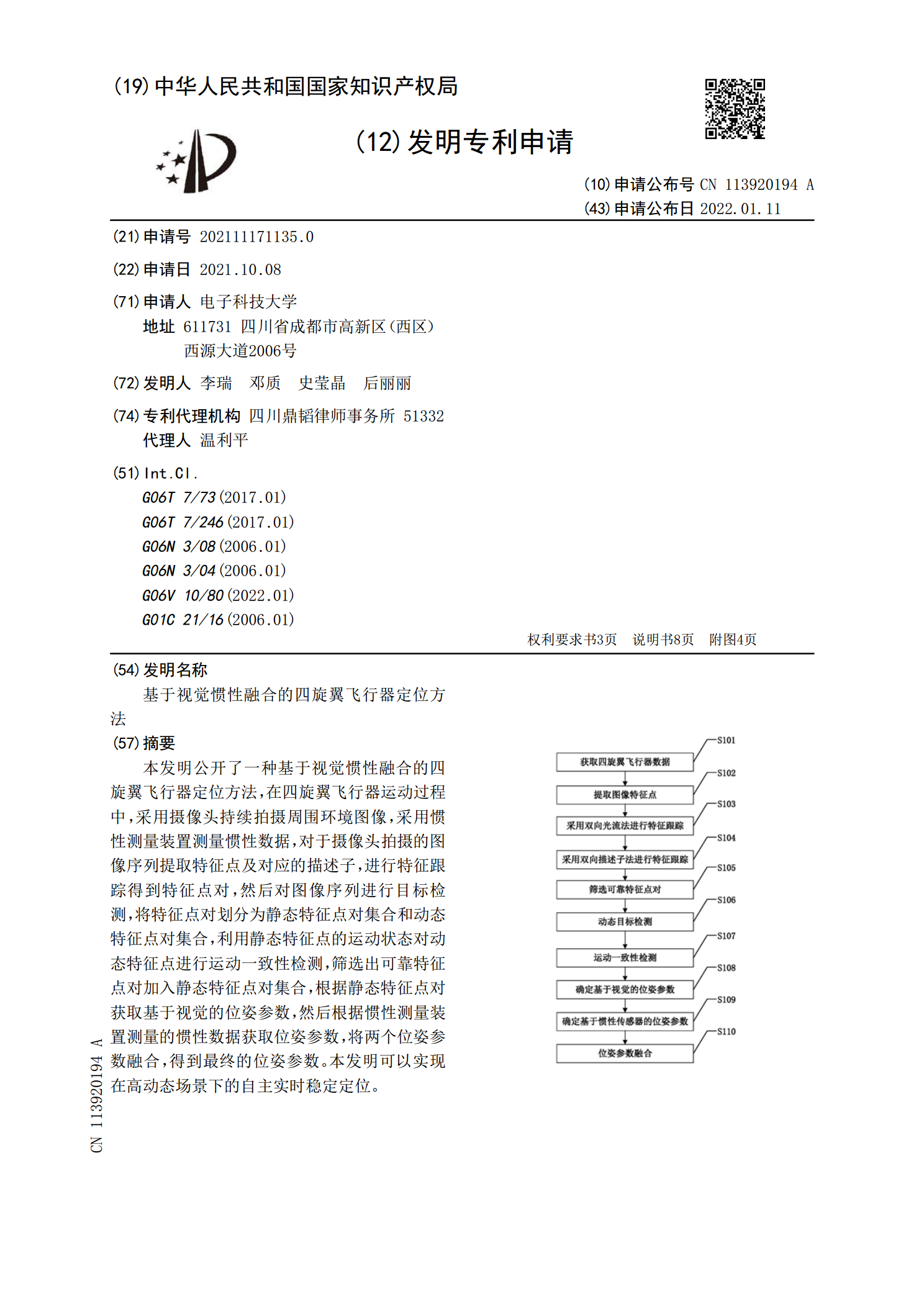
本发明公开了一种基于视觉惯性融合的四旋翼飞行器定位方法,在四旋翼飞行器运动过程中,采用摄像头持续拍摄周围环境图像,采用惯性测量装置测量惯性数据,对于摄像头拍摄的图像序列提取特征点及对应的描述子,进行特征跟踪得到特征点对,然后对图像序列进行目标检测,将特征点对划分为静态特征点对集合和动态特征点对集合,利用静态特征点的运动状态对动态特征点进行运动一致性检测,筛选出可靠特征点对加入静态特征点对集合,根据静态特征点对获取基于视觉的位姿参数,然后根据惯性测量装置测量的惯性数据获取位姿参数,将两个位姿参数融合,得到最
基于点线特征融合的单目视觉贯导SLAM方法及装置.pdf
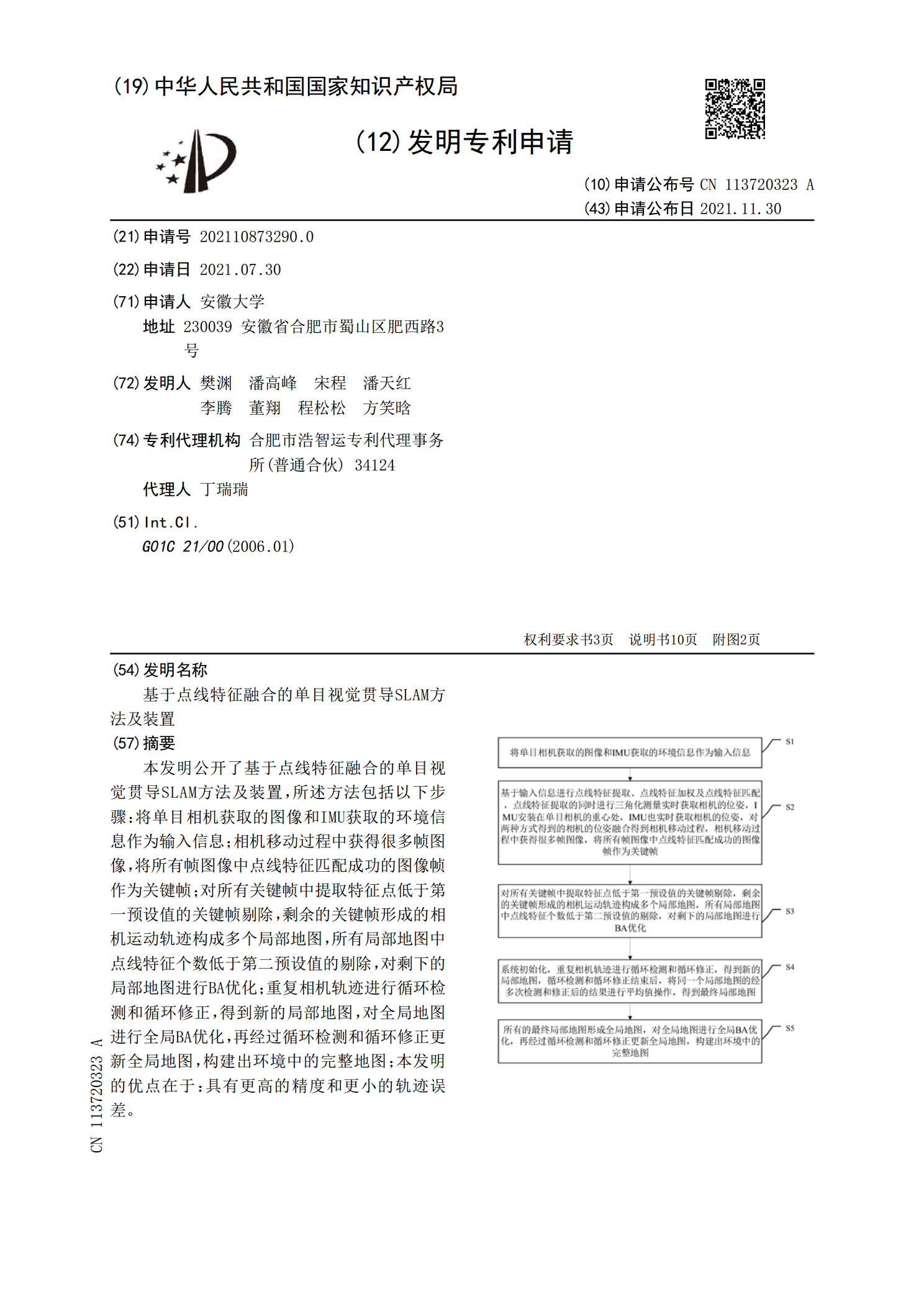
本发明公开了基于点线特征融合的单目视觉贯导SLAM方法及装置,所述方法包括以下步骤:将单目相机获取的图像和IMU获取的环境信息作为输入信息;相机移动过程中获得很多帧图像,将所有帧图像中点线特征匹配成功的图像帧作为关键帧;对所有关键帧中提取特征点低于第一预设值的关键帧剔除,剩余的关键帧形成的相机运动轨迹构成多个局部地图,所有局部地图中点线特征个数低于第二预设值的剔除,对剩下的局部地图进行BA优化;重复相机轨迹进行循环检测和循环修正,得到新的局部地图,对全局地图进行全局BA优化,再经过循环检测和循环修正更新全

一种基于鲁棒特征跟踪的视觉定位方法.pdf
本发明公开了一种基于图像处理及机器视觉的鲁棒特征跟踪与立体视觉定位技术。该技术可以在相机晃动以及室外光照条件下,融合惯性信息和视觉信息,实现可靠的立体视觉定位。通过双目摄像机实时采集图像,同时利用惯性测量单元采集相机旋转信息。利用特征提取算法提取图像中的特征点,并对左右图像中的特征点进行立体匹配。结合惯性信息,通过惯性融合KLT算法跟踪特征点,提高特征跟踪可靠性。利用双视几何原理恢复特征点的三维信息。使用高斯牛顿迭代的方法由特征点位置信息求得相机运动参数。使用RANSIC算法进一步提高视觉定位准确度。整个