
基于船载单目相机的视觉特征提取方法.pdf

一只****爱敏

1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于船载单目相机的视觉特征提取方法.pdf
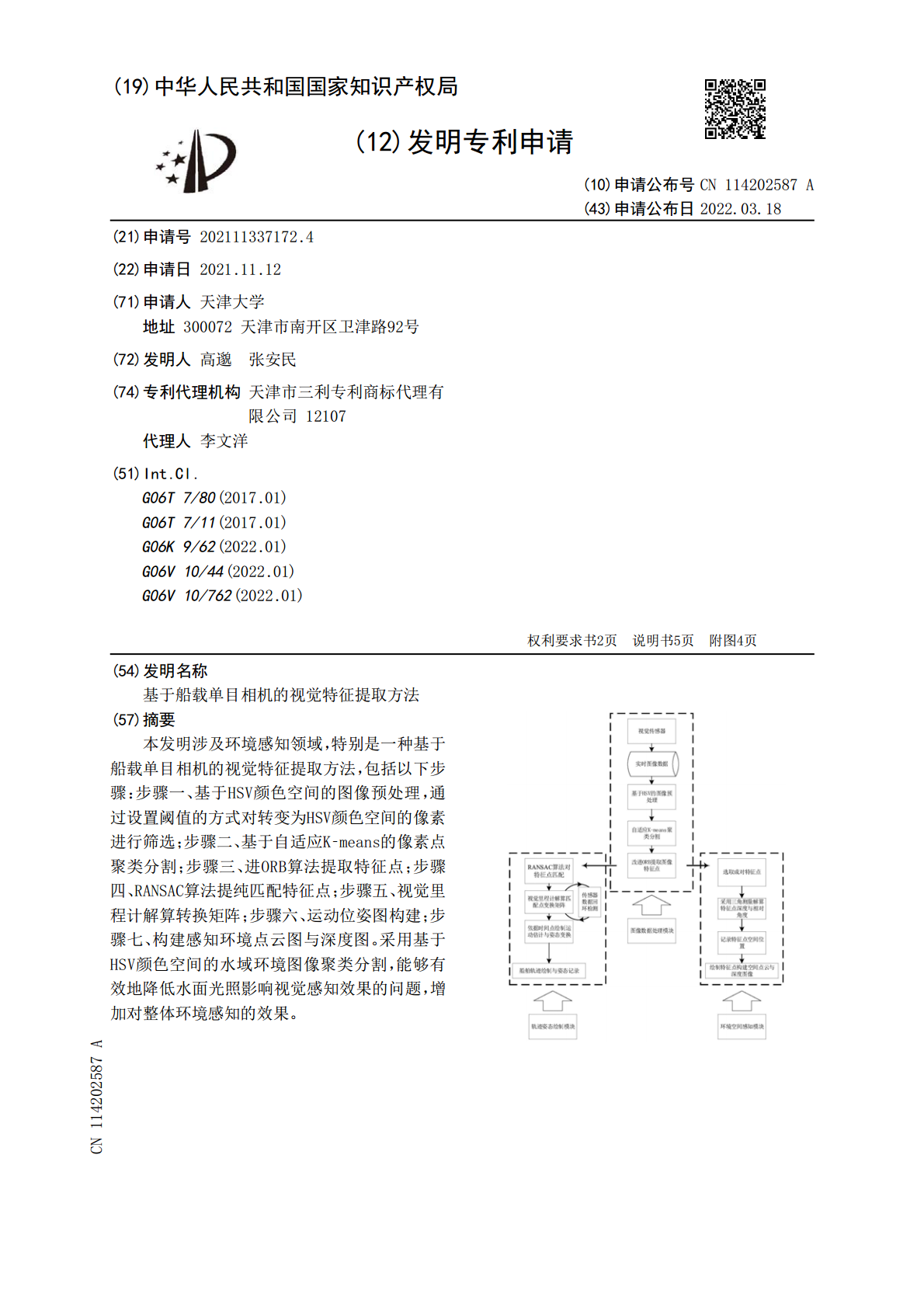
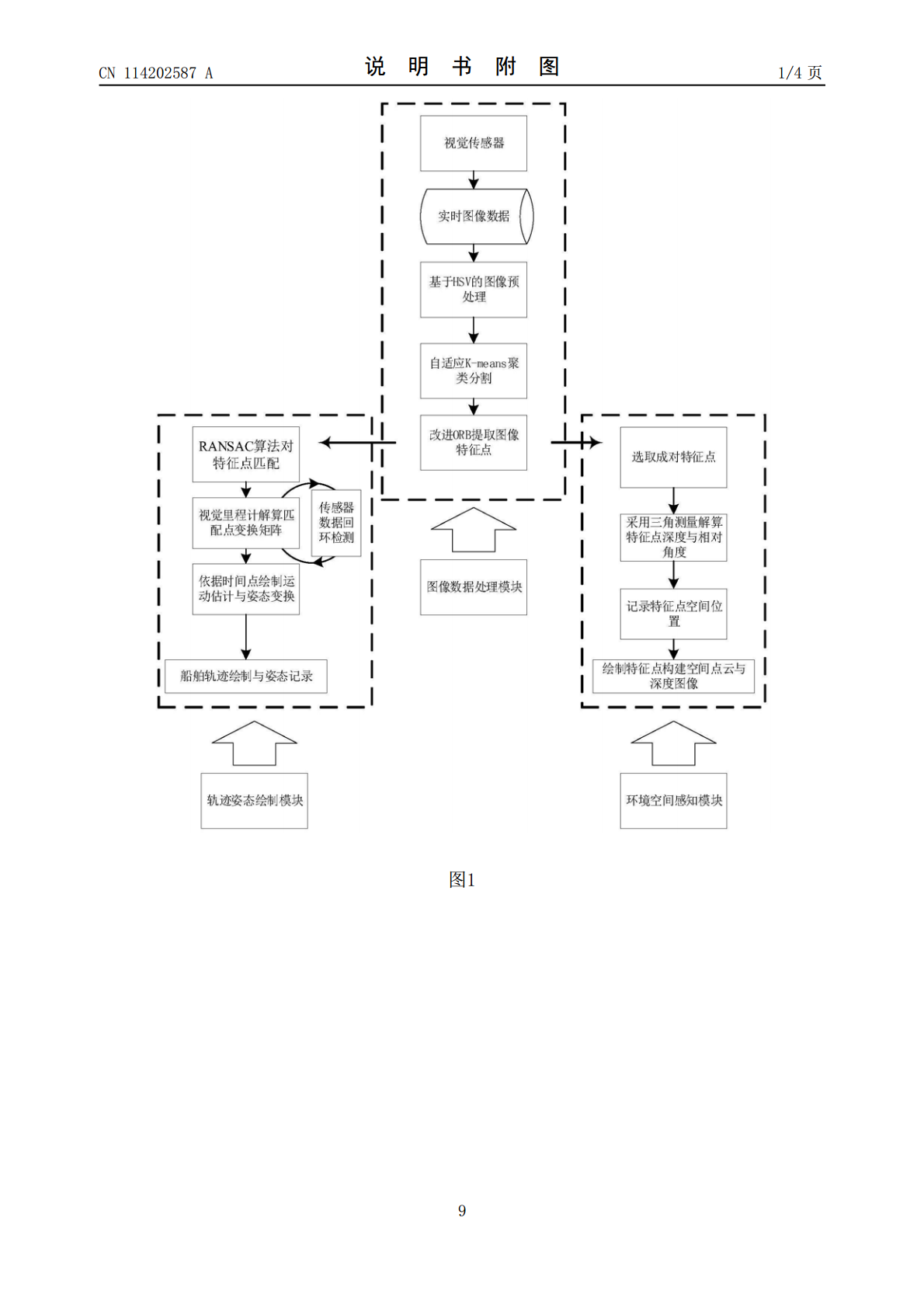
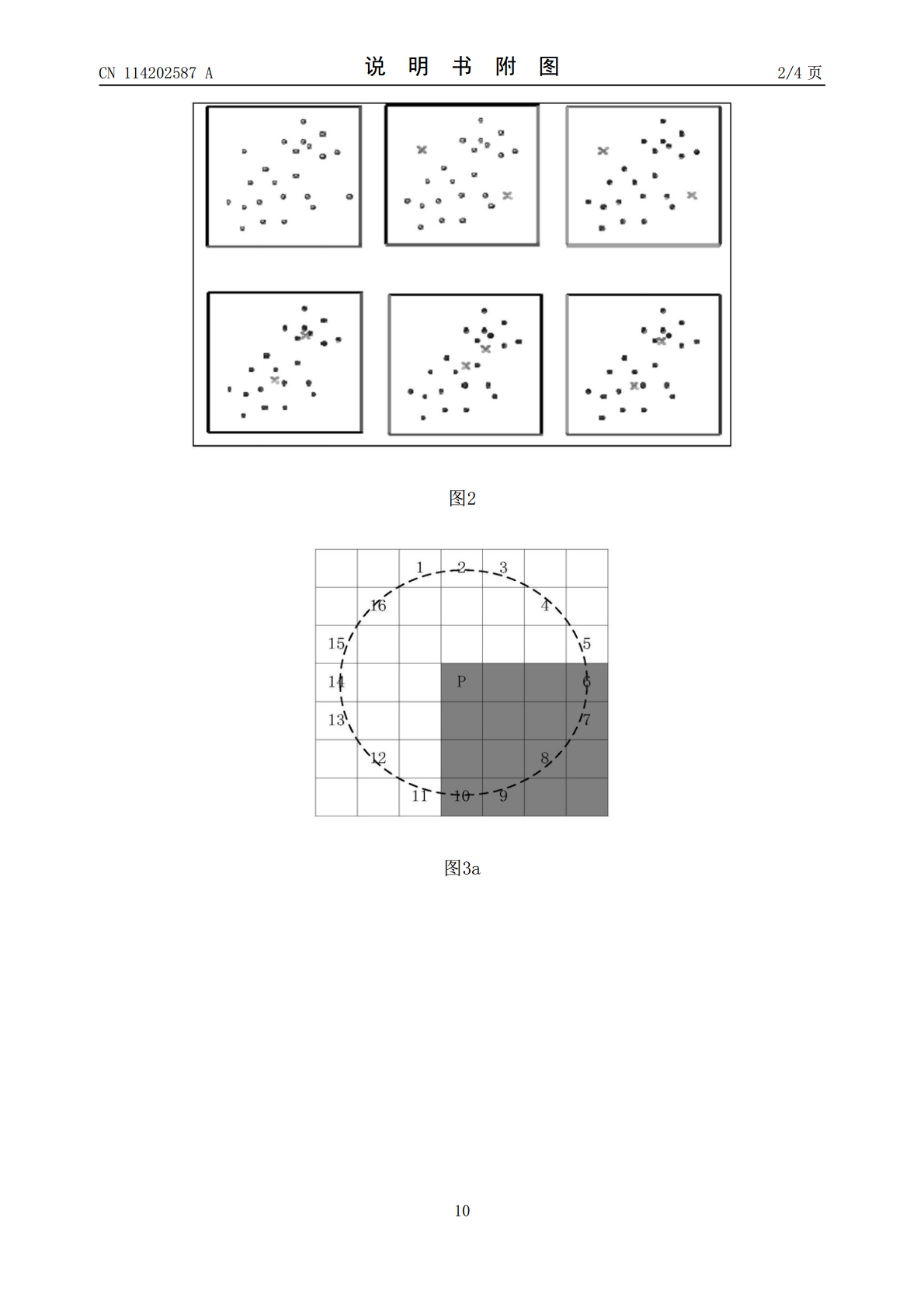
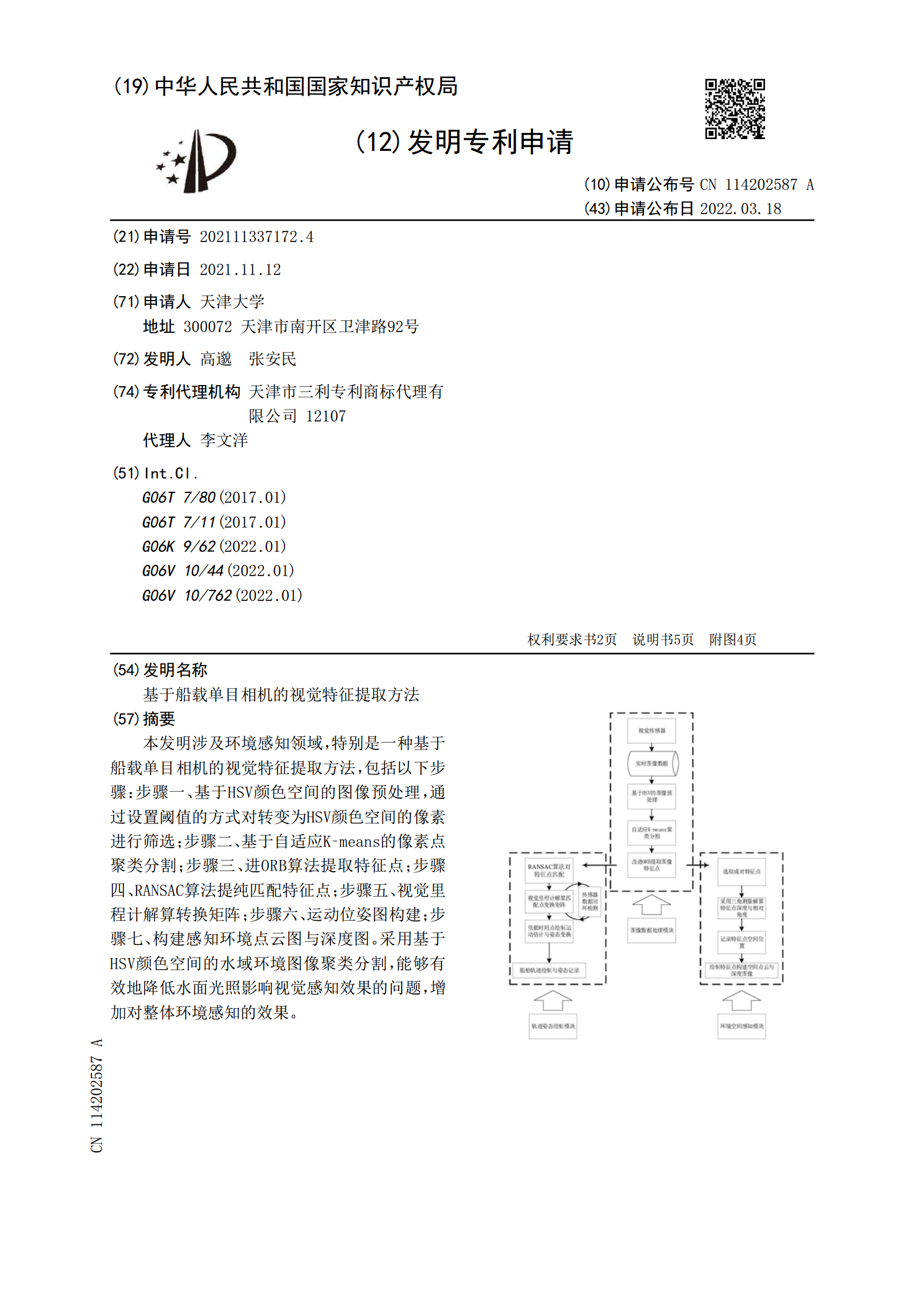
本发明涉及环境感知领域,特别是一种基于船载单目相机的视觉特征提取方法,包括以下步骤:步骤一、基于HSV颜色空间的图像预处理,通过设置阈值的方式对转变为HSV颜色空间的像素进行筛选;步骤二、基于自适应K‑means的像素点聚类分割;步骤三、进ORB算法提取特征点;步骤四、RANSAC算法提纯匹配特征点;步骤五、视觉里程计解算转换矩阵;步骤六、运动位姿图构建;步骤七、构建感知环境点云图与深度图。采用基于HSV颜色空间的水域环境图像聚类分割,能够有效地降低水面光照影响视觉感知效果的问题,增加对整体环境感知的效果

基于单目相机的视觉伺服算法研究综述报告.pptx
添加副标题目录PART01PART02视觉伺服的定义和发展历程单目相机在视觉伺服中的应用综述的目的和意义PART03视觉伺服系统的组成视觉伺服的目标跟踪原理视觉伺服的相机标定原理视觉伺服的控制策略PART04图像预处理技术特征提取技术目标跟踪技术相机标定技术控制策略优化技术PART05实验平台的搭建与实验条件实验结果与分析算法性能的评估指标实验结论与改进方向PART06单目相机视觉伺服算法在机器人领域的应用案例单目相机视觉伺服算法在其他领域的应用前景单目相机视觉伺服算法的发展趋势与展望PART07本综述报
一种基于单目相机视觉标靶定位的机械臂引导方法.pdf
一种基于单目相机视觉标靶定位的机械臂引导方法,属于计算机视觉与机器人领域,解决如何满足复杂环境光线下机械臂对视觉引导作业的灵活性、可靠性以及精度的要求的问题;灵活使用不同尺寸、不同编码、不同结构的标签码定制视觉标靶,定制完成后对标靶进行标定,在提高视觉标靶灵活性的同时保证精度;使用多级曝光图像进行视觉标靶检测与位姿求解,通过多级曝光采集图像,并提供一种视觉标靶的检测与位姿解算方法,在保证检测与定位精度的同时,提高视觉标靶的环境鲁棒性以及精度;定位完成后对视觉定位结果进行评估,有利于不同场景下的可靠性需求;

基于单目相机的旋转对称目标视觉测量的开题报告.docx
基于单目相机的旋转对称目标视觉测量的开题报告一、研究背景和意义旋转对称目标是指在旋转任意角度后,其形态和特征不发生任何变化的目标。常见的旋转对称目标有圆形、球体、柱体等。针对这种类型的目标,基于单目相机的视觉测量方法具有很高的实用性和广泛的应用前景。传统的测量方法通常采用物理测量手段,如卡尺、量角器等,但需要接触或者影响到目标表面,操作不方便,且测量精度受到环境条件的限制。而基于单目相机的视觉测量方法具有非接触、自动化、高精度等特点,具有广泛的应用前景和研究价值。二、研究内容和思路本研究旨在探究基于单目相

基于视觉的单目SLAM方法研究.docx
基于视觉的单目SLAM方法研究摘要:单目SLAM(SimultaneousLocalizationandMapping)是一种基于视觉的定位与建图技术,在无人驾驶、增强现实、机器人导航等领域具有重要应用。本文综述了基于视觉的单目SLAM方法的研究进展,主要包括特征点法、直接法和深度学习方法。特征点法通过检测和描述特征点的位置和外观来进行定位和建图,是最常用的方法之一;直接法通过直接匹配像素的亮度信息来估计相机的位姿,避免了特征提取和匹配的过程;深度学习方法将深度估计任务与SLAM任务结合,通过神经网络学习