
一种基于多驾驶模式切换的无人车辆控制方法.pdf

波峻****99


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多驾驶模式切换的无人车辆控制方法.pdf
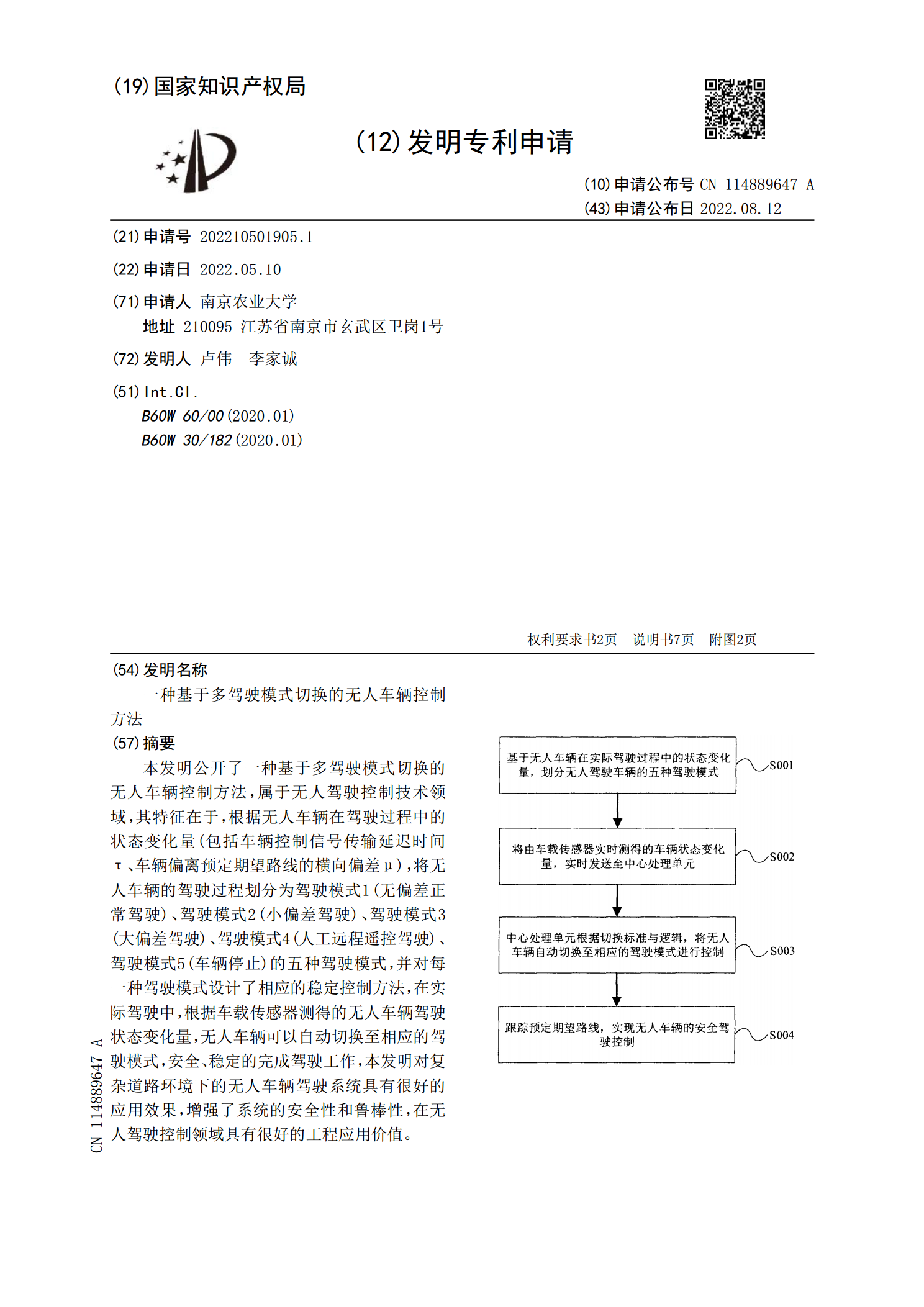
本发明公开了一种基于多驾驶模式切换的无人车辆控制方法,属于无人驾驶控制技术领域,其特征在于,根据无人车辆在驾驶过程中的状态变化量(包括车辆控制信号传输延迟时间τ、车辆偏离预定期望路线的横向偏差μ),将无人车辆的驾驶过程划分为驾驶模式1(无偏差正常驾驶)、驾驶模式2(小偏差驾驶)、驾驶模式3(大偏差驾驶)、驾驶模式4(人工远程遥控驾驶)、驾驶模式5(车辆停止)的五种驾驶模式,并对每一种驾驶模式设计了相应的稳定控制方法,在实际驾驶中,根据车载传感器测得的无人车辆驾驶状态变化量,无人车辆可以自动切换至相应的驾驶
无人驾驶车辆的驾驶模式切换方法和装置.pdf
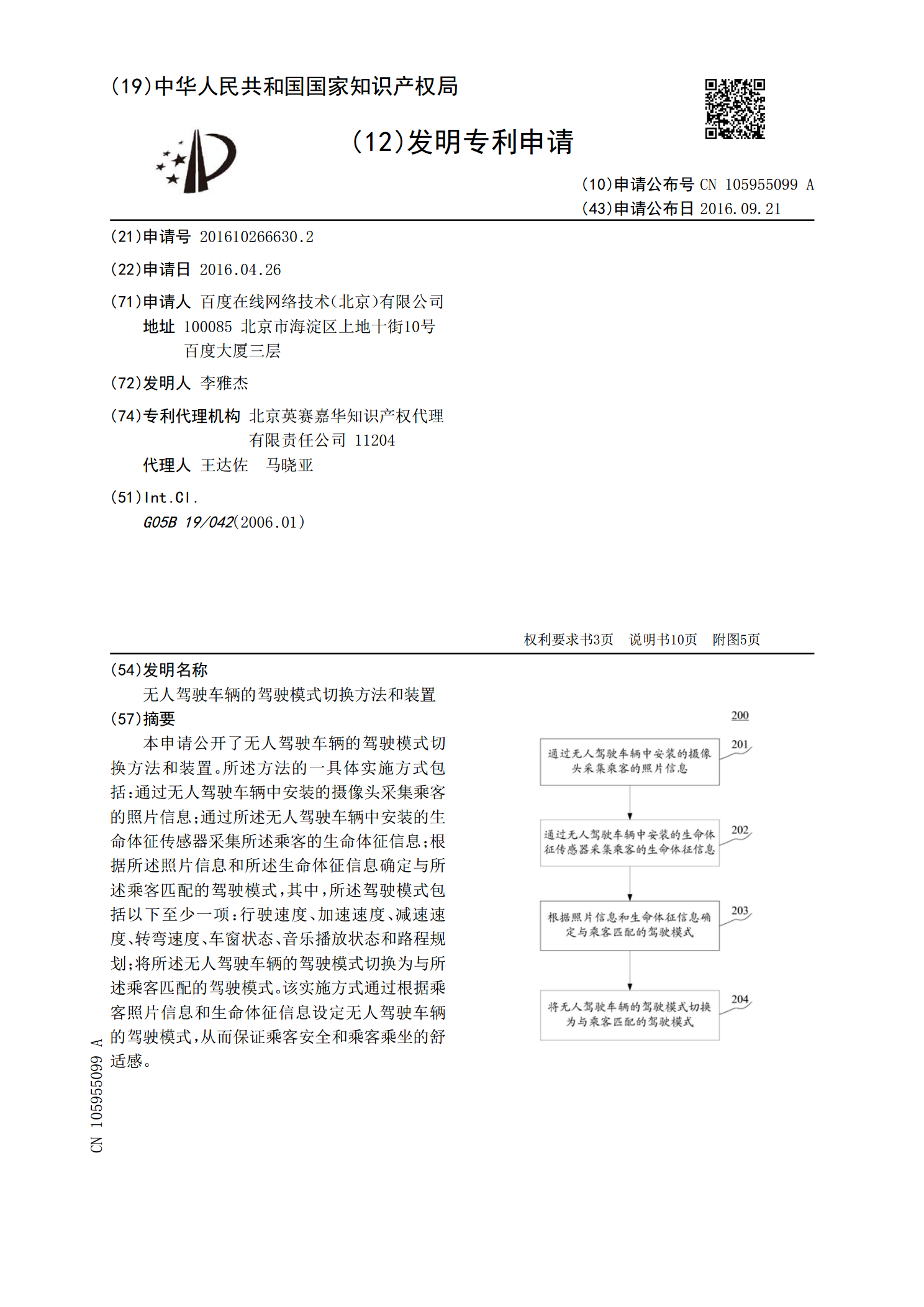
本申请公开了无人驾驶车辆的驾驶模式切换方法和装置。所述方法的一具体实施方式包括:通过无人驾驶车辆中安装的摄像头采集乘客的照片信息;通过所述无人驾驶车辆中安装的生命体征传感器采集所述乘客的生命体征信息;根据所述照片信息和所述生命体征信息确定与所述乘客匹配的驾驶模式,其中,所述驾驶模式包括以下至少一项:行驶速度、加速速度、减速速度、转弯速度、车窗状态、音乐播放状态和路程规划;将所述无人驾驶车辆的驾驶模式切换为与所述乘客匹配的驾驶模式。该实施方式通过根据乘客照片信息和生命体征信息设定无人驾驶车辆的驾驶模式,从而

一种车辆驾驶模式的切换方法.pdf
本发明提供了一种车辆驾驶模式的切换方法,应用于具有自动驾驶系统的汽车中,其中,所述方法包括:ECU检测方向盘传动的转矩;当所述转矩大于预设值时,所述ECU停止输出电流至磁流变离合器的内部线圈;所述内部线圈停止产生磁场,所述磁流变离合器停止输出力矩至转矩处理装置;所述转矩处理装置输出控制转矩至车辆转向控制装置,以实现自动驾驶模式人为接管模式的切换。通过本发明提供的车辆驾驶模式的切换方法,利用磁流变离合器的特性,离合器内部线圈停止产生磁场,磁流变离合器停止输出力矩至转矩处理装置,从而提高了在切换驾驶模式时的可

一种基于多模式切换的轮毂电机驱动车辆控制方法及系统.pdf
本发明公开了一种基于多模式切换的轮毂电机驱动车辆控制方法及系统,属于轮毂电机驱动汽车技术领域,解决了如何提高轮毂电机驱动效率的问题。一种基于多模式切换的轮毂电机驱动车辆控制方法,包括以下步骤:当车辆的四个轮毂电机均能正常工作时,根据轮毂电机总输出功率判断车辆进行四轮驱动、进行两轮驱动或停止驱动;当车辆有三个轮毂电机能正常工作时,则以车辆一端中左、右两侧均能正常工作的轮毂电机,进行车辆驱动;当车辆有两个轮毂电机能正常工作时,若能正常工作的轮毂电机位于车辆同侧,则车辆停止运行,否则利用该两个能正常工作的轮毂电

车辆驾驶模式切换方法、装置及车辆.pdf
本申请提供了一种车辆驾驶模式切换方法、装置及车辆,涉及车辆技术领域,具体涉及车辆控制技术领域。具体实现方案为:获取车辆的加速踏板的第一踩踏信号和第二踩踏信号,第一踩踏信号和第二踩踏信号间隔生成,并且在第一踩踏信号和第二踩踏信号之间存在回撤信号;在检测到满足第一切换条件的情况下,发送切换信号,切换信号使得车辆从第一模式切换至第二模式;第一切换条件包括:第一踩踏信号的第一目标信号值和第二踩踏信号的第二目标信号值均表征加速踏板被踩踏至开度大于或等于第一阈值的位置。