
斗臂车绝缘斗控制机构及斗臂车.pdf

书生****ma

1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

斗臂车绝缘斗控制机构及斗臂车.pdf
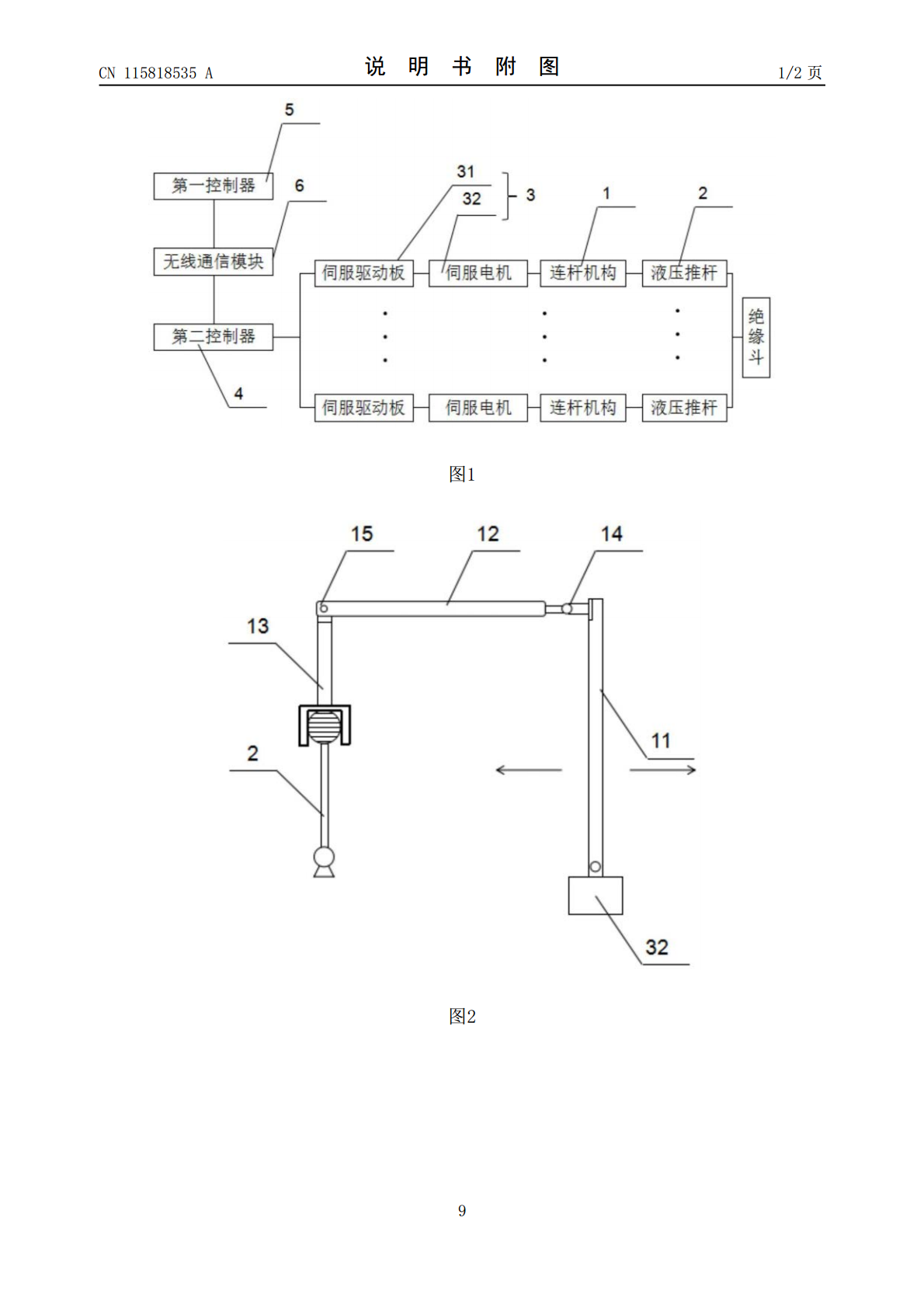
本发明提供一种斗臂车绝缘斗控制机构及斗臂车,属于斗臂车控制技术领域,斗臂车具有多个关节,每一关节对应一个液压推杆,所述控制机构包括:多个连杆机构,设置在斗臂车的控制台内,与对应的液压推杆连接,用于实现液压推杆动作;多个驱动机构,设置在斗臂车的控制台内,每一个驱动机构与一个连杆机构对应设置,用于产生使连杆机构动作的驱动力;第二控制器,设置在斗臂车的控制台内,用于在接收到第一控制器发送的动作指令时,控制对应的驱动机构产生驱动力;第一控制器,与第二控制器通信连接,用于根据外部输入信号产生对应的动作指令,并将动作
一种导轮机构、绝缘斗臂以及绝缘斗臂车.pdf
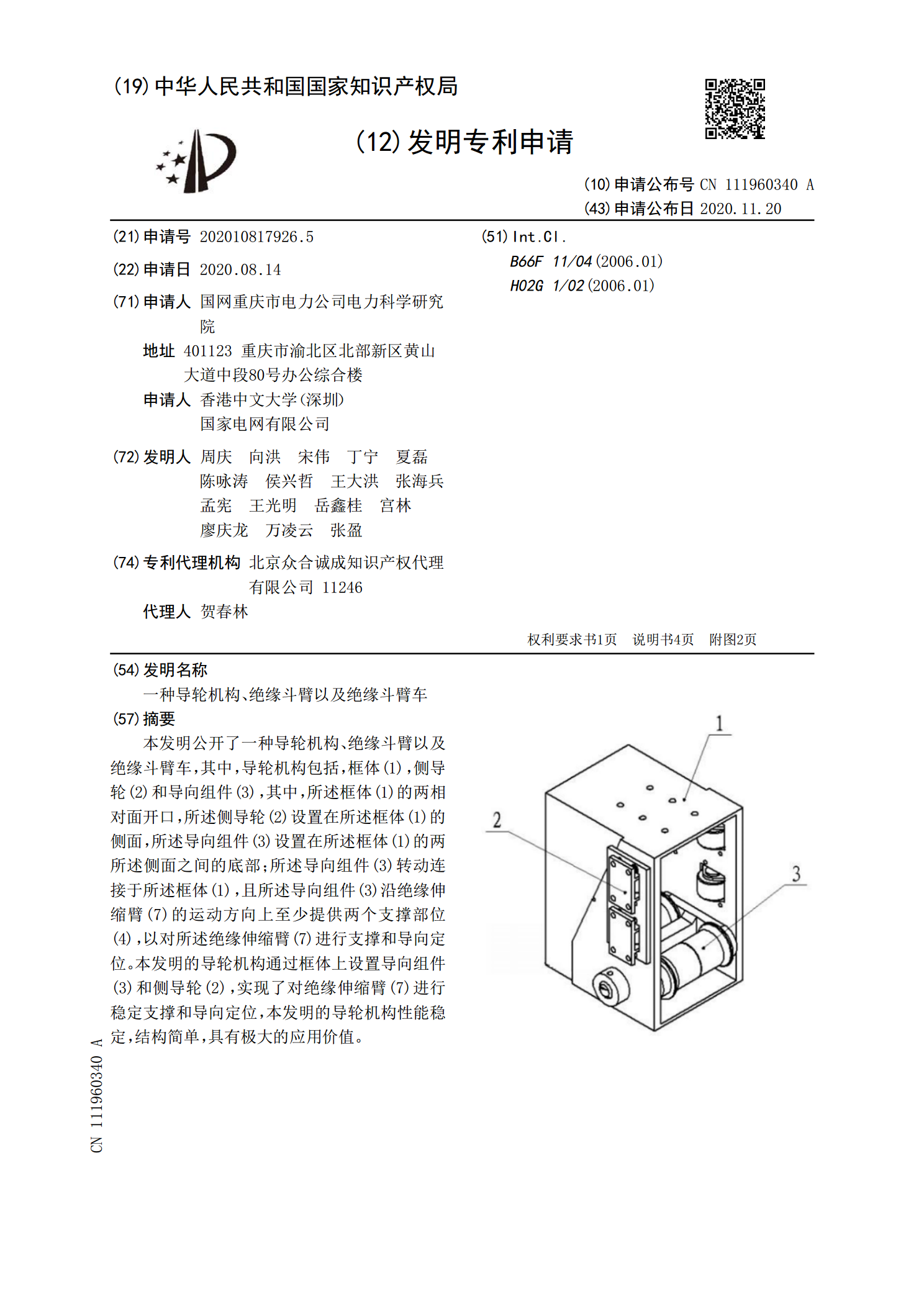
本发明公开了一种导轮机构、绝缘斗臂以及绝缘斗臂车,其中,导轮机构包括,框体(1),侧导轮(2)和导向组件(3),其中,所述框体(1)的两相对面开口,所述侧导轮(2)设置在所述框体(1)的侧面,所述导向组件(3)设置在所述框体(1)的两所述侧面之间的底部;所述导向组件(3)转动连接于所述框体(1),且所述导向组件(3)沿绝缘伸缩臂(7)的运动方向上至少提供两个支撑部位(4),以对所述绝缘伸缩臂(7)进行支撑和导向定位。本发明的导轮机构通过框体上设置导向组件(3)和侧导轮(2),实现了对绝缘伸缩臂(7)进行稳

一种绝缘斗臂车的重心监测系统和方法及绝缘斗臂车.pdf
本发明公开了一种绝缘斗臂车的重心监测系统和方法及绝缘斗臂车,所述监测绝缘斗臂车重心的方法包括以下步骤:采集绝缘斗臂车支腿承受的压力数据;采集绝缘斗臂车的倾斜数据;计算绝缘斗臂车的实时重心情况,判断重心是否偏移出安全区域,若重心偏移出安全区域,则进行限制操作的控制,若重心落回安全区域,则解除操作限制;显示绝缘斗臂车的实时重心数据。本发明的绝缘斗臂车的重心监测系统和方法及绝缘斗臂车能够限制绝缘斗臂车在重心偏移之后继续操作,可防范并减少作业事故的发生。

绝缘斗臂车保养维护.doc
DL/T854—2004《带电作业用绝缘斗臂车的保养维护及使用中的试验》编写说明--------------------------------------------------------------------------------作者:武汉高压研究所易辉来源:《电力标准化与计量》更新时间:2005-04-28评论:0条1概述电力行业标准《带电作业用绝缘斗臂车的保养维护及使用中的试验》是根据原国家经贸委2001年度电力行业标准制、修订计划项目(电力[2001]44号文)的安排编制的。本标准修改采用
一种绝缘斗臂车臂架伸缩机构.pdf
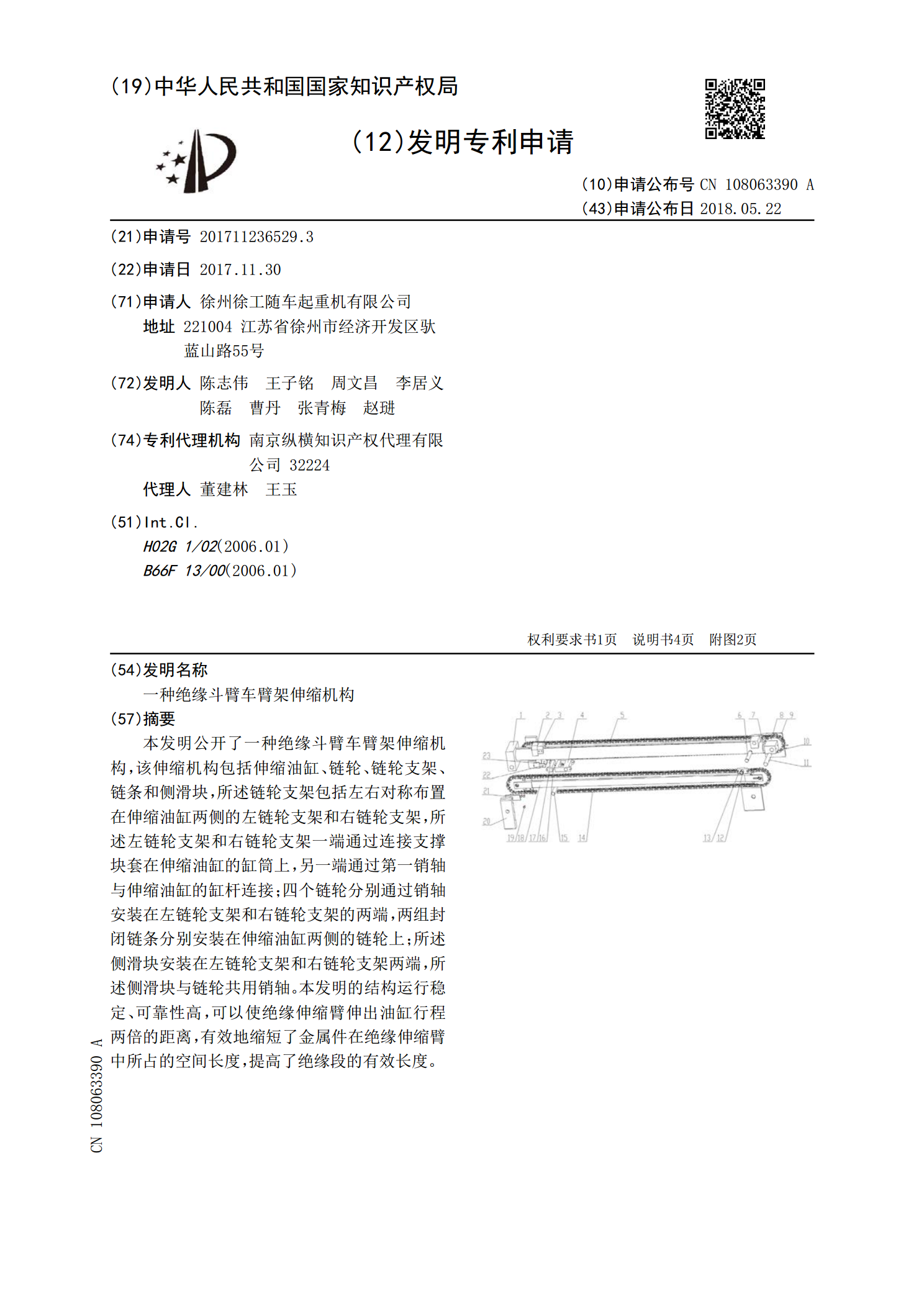
本发明公开了一种绝缘斗臂车臂架伸缩机构,该伸缩机构包括伸缩油缸、链轮、链轮支架、链条和侧滑块,所述链轮支架包括左右对称布置在伸缩油缸两侧的左链轮支架和右链轮支架,所述左链轮支架和右链轮支架一端通过连接支撑块套在伸缩油缸的缸筒上,另一端通过第一销轴与伸缩油缸的缸杆连接;四个链轮分别通过销轴安装在左链轮支架和右链轮支架的两端,两组封闭链条分别安装在伸缩油缸两侧的链轮上;所述侧滑块安装在左链轮支架和右链轮支架两端,所述侧滑块与链轮共用销轴。本发明的结构运行稳定、可靠性高,可以使绝缘伸缩臂伸出油缸行程两倍的距离,