
一种基于神经网络估计路径代价的多目标点路径规划方法.pdf

是雁****找我

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于神经网络估计路径代价的多目标点路径规划方法.pdf
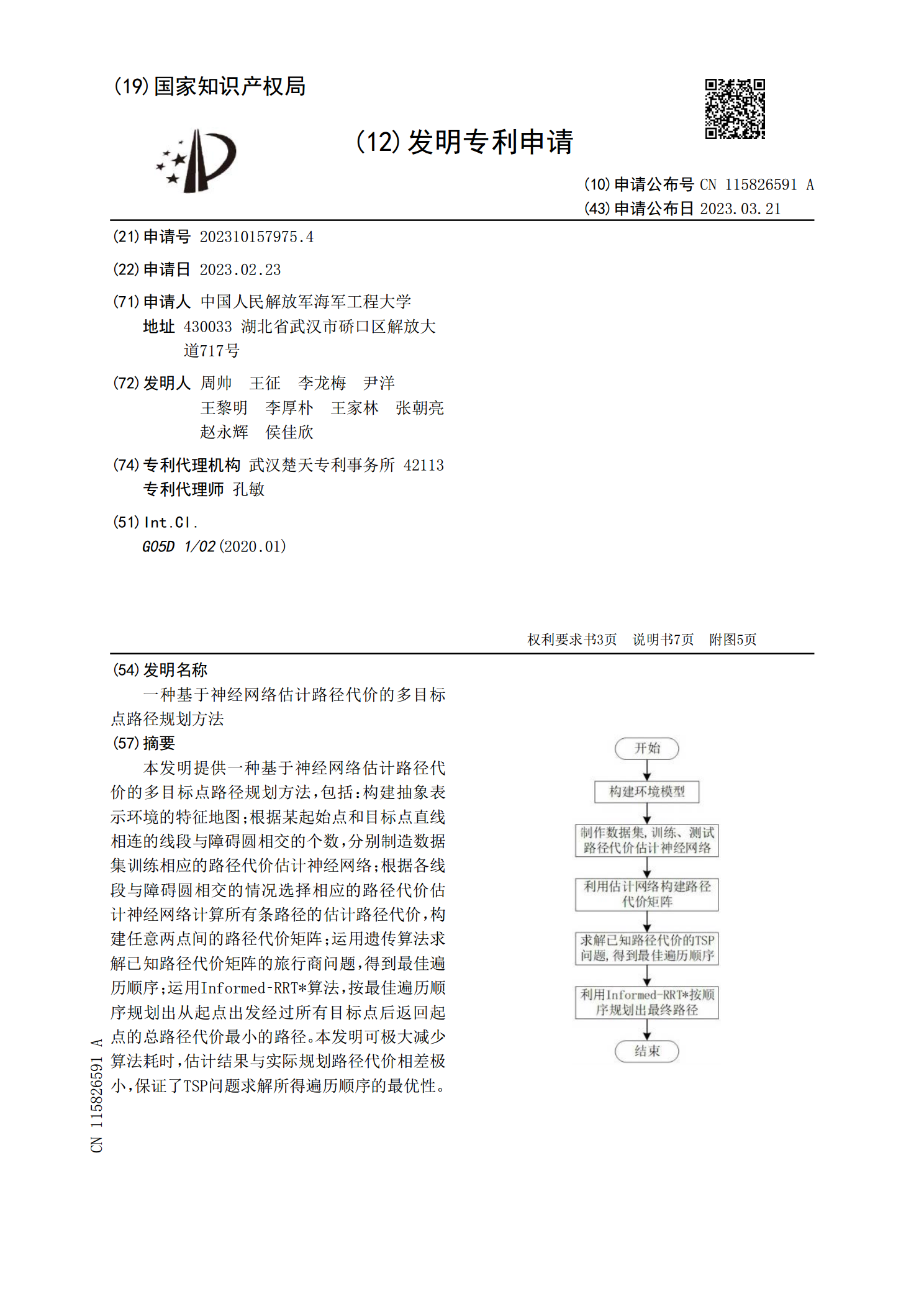
本发明提供一种基于神经网络估计路径代价的多目标点路径规划方法,包括:构建抽象表示环境的特征地图;根据某起始点和目标点直线相连的线段与障碍圆相交的个数,分别制造数据集训练相应的路径代价估计神经网络;根据各线段与障碍圆相交的情况选择相应的路径代价估计神经网络计算所有条路径的估计路径代价,构建任意两点间的路径代价矩阵;运用遗传算法求解已知路径代价矩阵的旅行商问题,得到最佳遍历顺序;运用Informed‑RRT*算法,按最佳遍历顺序规划出从起点出发经过所有目标点后返回起点的总路径代价最小的路径。本发明可极大减少算
一种基于路径时间代价的无人机路径规划方法及系统.pdf
本发明涉及一种基于路径时间代价的无人机路径规划方法及系统,可根据无人机的运动约束条件、可飞行区域和障碍信息,以路径时间最短为目标,通过定制设计路径搜索过程中的节点扩展方式和节点代价计算机制,能够生成时间最短的无人机避障飞行路径。

基于Fast Marching方法的多目标点路径规划的研究.docx
基于FastMarching方法的多目标点路径规划的研究随着自主无人系统的飞速发展,路径规划成为了无人机系统的核心技术之一。在复杂情况下的多目标点路径规划一直是一个具有挑战性的研究课题。本篇论文基于FastMarching方法探究多目标点路径规划的研究。首先,我们需要明确路径规划的基本概念。路径规划是指在给定的地图和初始、目标点条件下,为无人机规划一条从初始点到目标点的最优路径。这种路径必须考虑到各种实际限制,如地形、地图、避障,飞行器速度等。FastMarching方法是一种基于偏微分方程的路径规划算法
一种基于神经网络的路径规划方法、装置、设备及介质.pdf
本发明涉及一种基于神经网络的路径规划方法、装置、设备及介质,所述方法包括:获取区域信息;根据所述区域信息将区域分割成面积和形状一致的若干个栅格;根据若干个所述栅格确定与其对应的神经网络结构,所述神经网络结构中各个神经元与各个所述栅格位置一一对应;从若干个所述神经元中确定出目标点和若干个AGV;构建与所述目标点对应的目标神经网络;根据所述目标神经网络得到各个AGV位置的状态值;当所述目标点和各个所述AGV位置的状态值不等于0时,完成构建所述目标神经网络,以确定目标AGV及对应的路径。通过改变构建神经网络的终

基于改进神经网络的多AUV全覆盖路径规划.docx
基于改进神经网络的多AUV全覆盖路径规划基于改进神经网络的多AUV全覆盖路径规划摘要:多自主水下机器人(AUV)任务规划是一个复杂而具有挑战性的问题,尤其是在需要全覆盖特定区域的情况下。本论文提出了一种基于改进神经网络的多AUV全覆盖路径规划方法,该方法能够高效地解决多AUV的路径规划问题,实现全覆盖任务。首先,我们介绍了多AUV路径规划的背景和挑战,然后详细描述了我们提出的改进神经网络模型。接下来,我们提出了一种有效的路径规划算法,并通过实验验证了该算法的有效性和性能。最后,我们总结了本论文的主要贡献和