
基于改进神经网络的多AUV全覆盖路径规划.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进神经网络的多AUV全覆盖路径规划.docx
基于改进神经网络的多AUV全覆盖路径规划基于改进神经网络的多AUV全覆盖路径规划摘要:多自主水下机器人(AUV)任务规划是一个复杂而具有挑战性的问题,尤其是在需要全覆盖特定区域的情况下。本论文提出了一种基于改进神经网络的多AUV全覆盖路径规划方法,该方法能够高效地解决多AUV的路径规划问题,实现全覆盖任务。首先,我们介绍了多AUV路径规划的背景和挑战,然后详细描述了我们提出的改进神经网络模型。接下来,我们提出了一种有效的路径规划算法,并通过实验验证了该算法的有效性和性能。最后,我们总结了本论文的主要贡献和
基于改进RRT算法的AUV路径规划方法.pdf
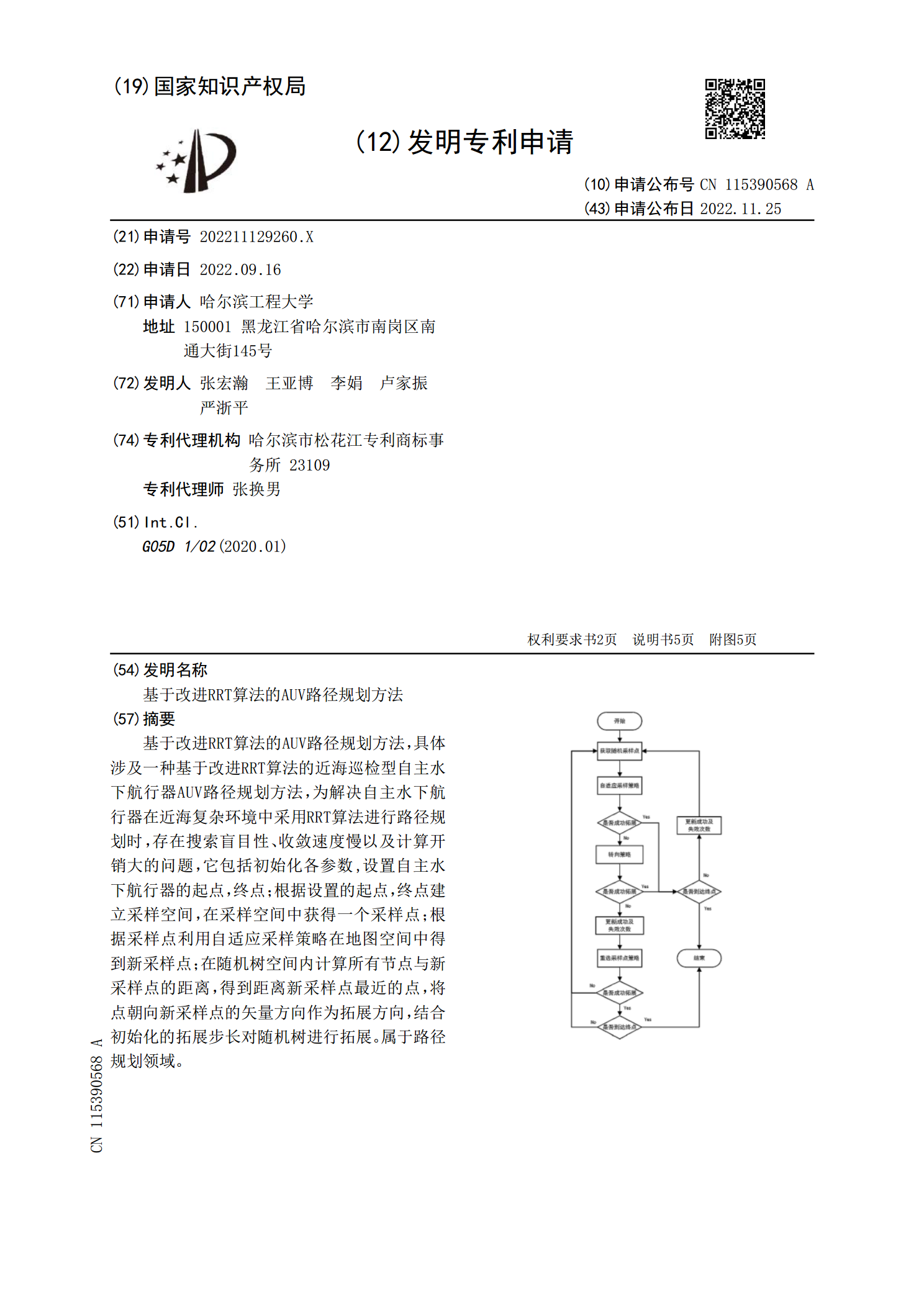
基于改进RRT算法的AUV路径规划方法,具体涉及一种基于改进RRT算法的近海巡检型自主水下航行器AUV路径规划方法,为解决自主水下航行器在近海复杂环境中采用RRT算法进行路径规划时,存在搜索盲目性、收敛速度慢以及计算开销大的问题,它包括初始化各参数,设置自主水下航行器的起点,终点;根据设置的起点,终点建立采样空间,在采样空间中获得一个采样点;根据采样点利用自适应采样策略在地图空间中得到新采样点;在随机树空间内计算所有节点与新采样点的距离,得到距离新采样点最近的点,将点朝向新采样点的矢量方向作为拓展方向,结

基于改进RRT算法的AUV路径规划研究的任务书.docx
基于改进RRT算法的AUV路径规划研究的任务书一、研究背景随着无人机和自动化技术的不断进步,自主水下机器人(AUV)已成为海洋勘探、海洋环境监测以及海底资源的重要工具。AUV具有无人驾驶、灵活性强、适应各种海洋环境复杂的特点,它可以在各种水下环境中执行任务,例如地形测量、水下图像获取、水生生物监测等。然而,AUV的自主性能直接影响着它们的任务能力和有效性。因此,设计一种有效的、高效的AUV路径规划算法是非常重要的。现有的AUV路径规划算法主要包括基于深度学习、基于遗传算法、有限状态机等等。但是这些算法存在

基于改进量子粒子群算法的AUV路径规划研究.docx
基于改进量子粒子群算法的AUV路径规划研究基于改进量子粒子群算法的AUV路径规划研究摘要:自主水下机器人的路径规划是其关键技术之一。为了提高自主水下机器人在复杂环境中的路径规划效率和准确性,本文基于改进量子粒子群算法(ImprovedQuantumParticleSwarmOptimization,IQPSO)对AUV(AutonomousUnderwaterVehicle,AUV)的路径规划问题进行研究。通过分析AUV路径规划的特点和IQPSO算法的优势,提出了一种基于IQPSO的AUV路径规划方法。在
基于改进捕食者猎物模型和DMPC的多机器人全覆盖路径规划方法.pdf
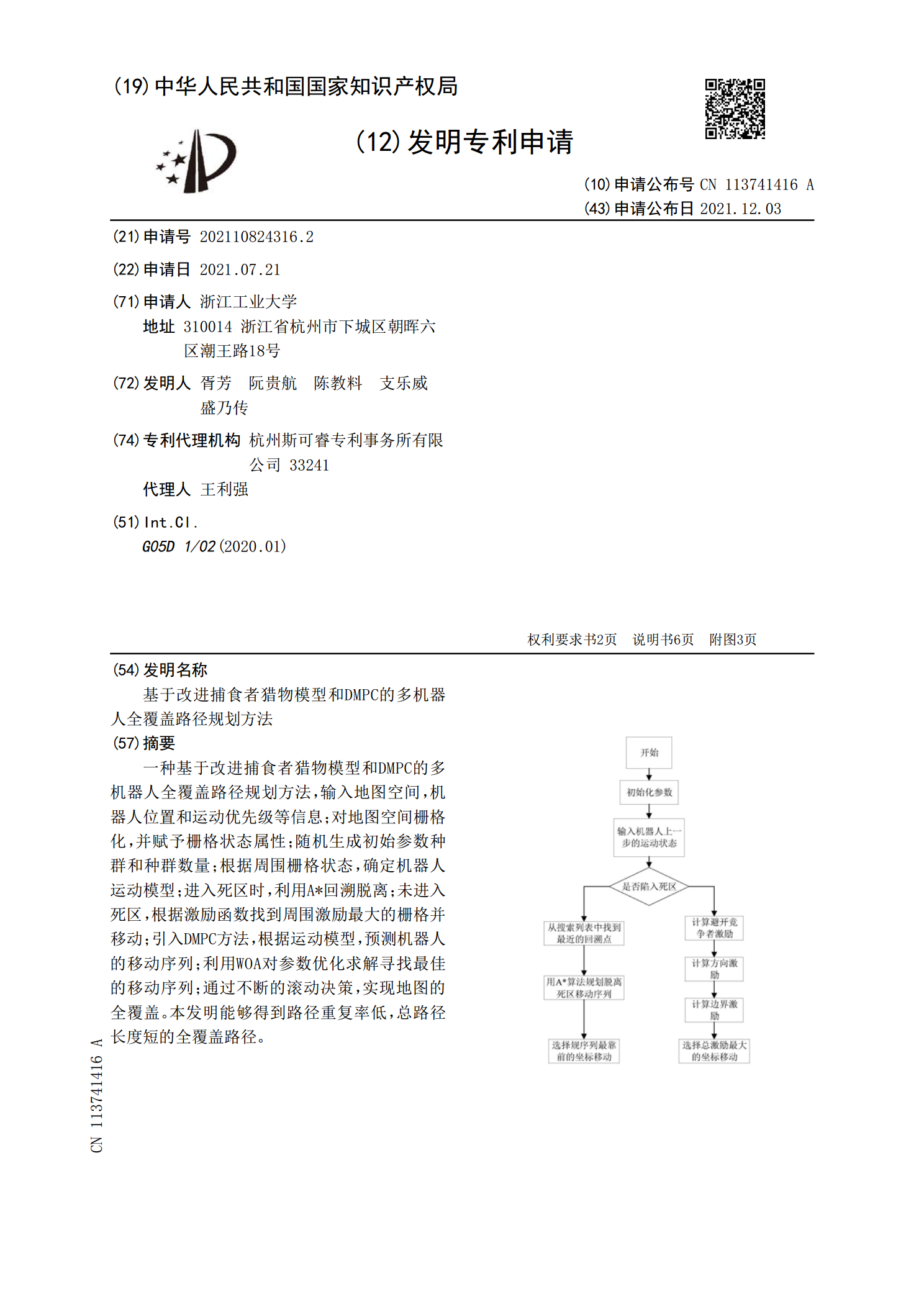
一种基于改进捕食者猎物模型和DMPC的多机器人全覆盖路径规划方法,输入地图空间,机器人位置和运动优先级等信息;对地图空间栅格化,并赋予栅格状态属性;随机生成初始参数种群和种群数量;根据周围栅格状态,确定机器人运动模型;进入死区时,利用A*回溯脱离;未进入死区,根据激励函数找到周围激励最大的栅格并移动;引入DMPC方法,根据运动模型,预测机器人的移动序列;利用WOA对参数优化求解寻找最佳的移动序列;通过不断的滚动决策,实现地图的全覆盖。本发明能够得到路径重复率低,总路径长度短的全覆盖路径。