
竖井掘进用六自由度水下机器人.pdf

子安****吖吖


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
竖井掘进用六自由度水下机器人.pdf
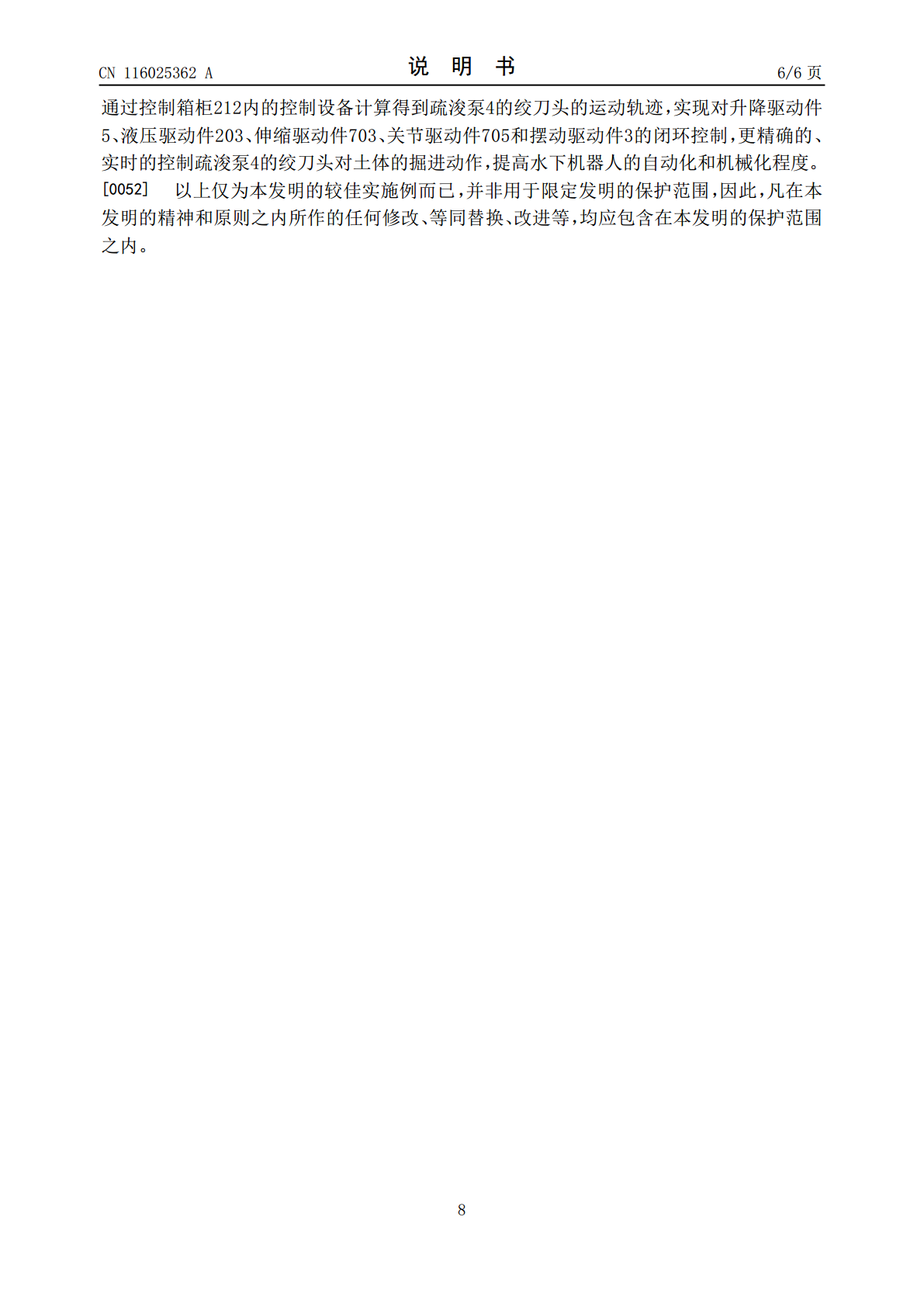
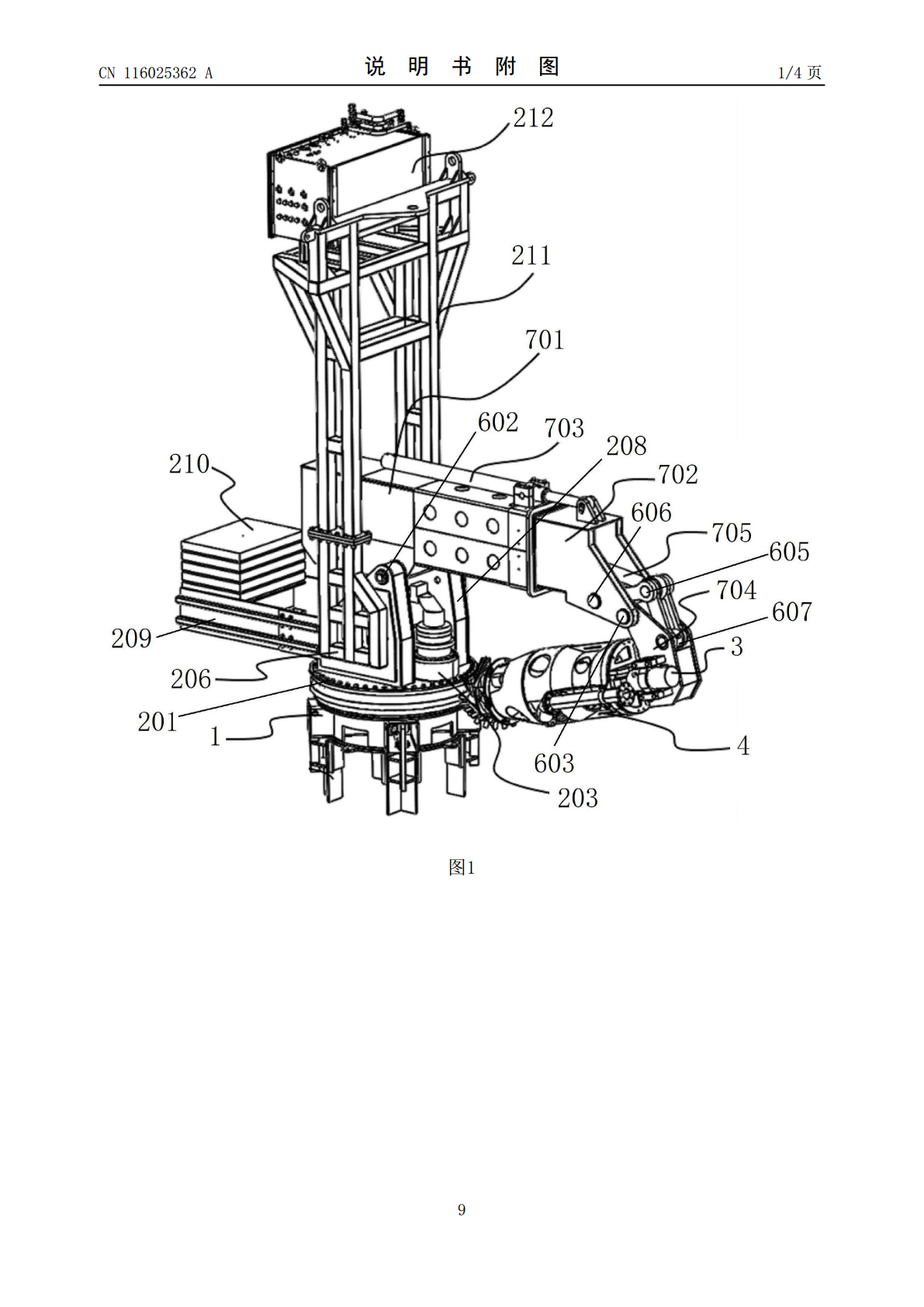
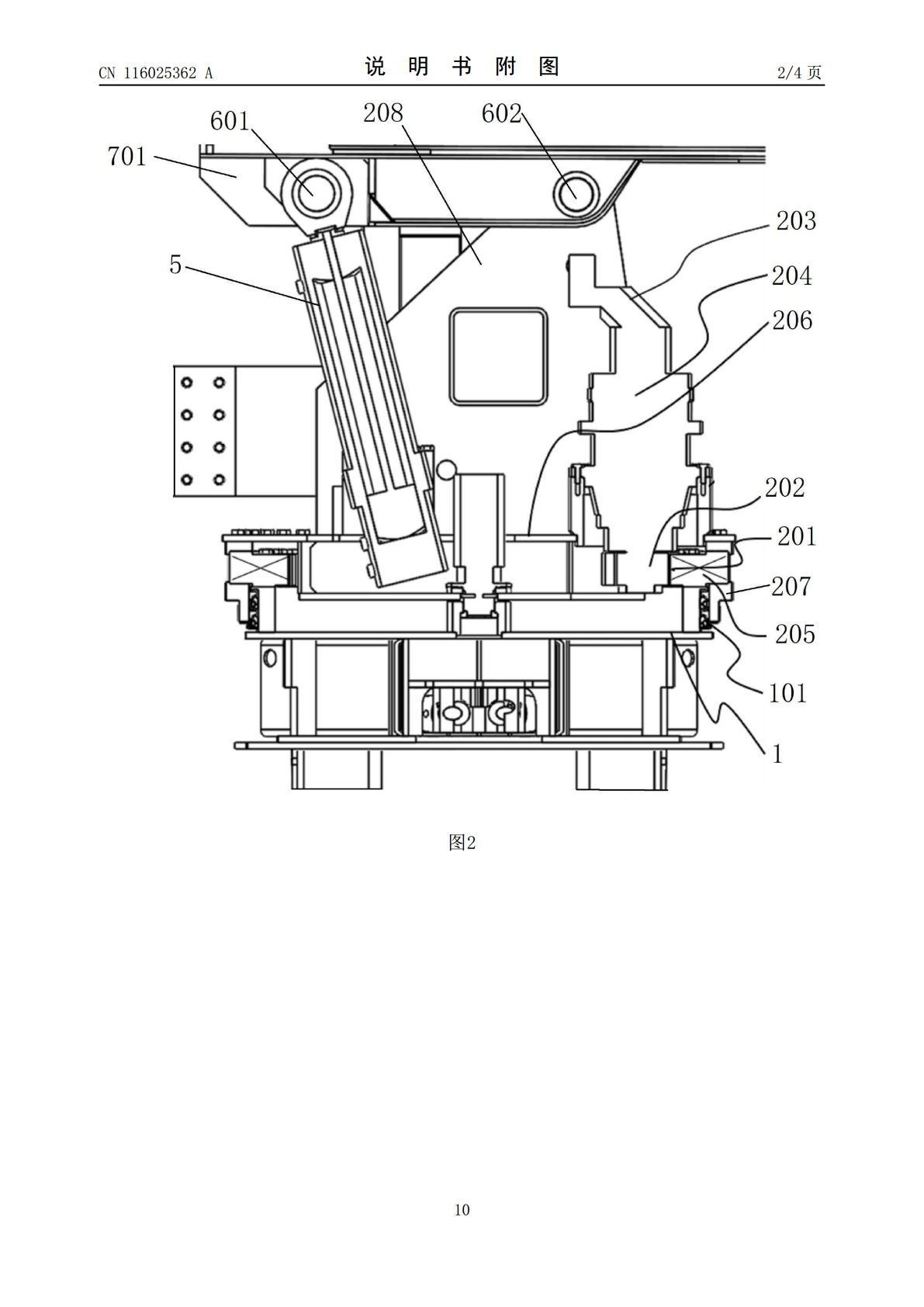
本发明公开了一种竖井掘进用六自由度水下机器人,包括固定底座(1)、转台组件、机械臂组件、摆动驱动件(3)、疏浚泵(4)和升降驱动件(5);固定底座固定装在沉井结构的十字梁顶部中心,转台组件可转动式装在固定底座上;升降驱动件固定安装在转台组件上,机械臂组件的一端与升降驱动件的驱动端可转动式连接,机械臂组件的底部与转台组件可转动式连接,使机械臂组件能随转台组件同步水平转动,并通过升降驱动件相对转台组件竖向转动;疏浚泵通过摆动驱动件可摆动式安装在机械臂组件的另一端,使疏浚泵能在固定底座的四周转动、升降或摆动并挖

六自由度水下球形机器人.pdf
本发明公开了一种六自由度水下球形机器人,它包括球形外壳,其内设有长轴、活塞式储水设备,长轴两端固定在两圆形孔内,长轴空腔内仅设有一水下推进器,长轴中部套设旋转方筒,方筒一端设有大齿轮,大齿轮套设固定在长轴上,方筒左侧设有第一电机,第一电机输出轴设有小齿轮,小齿轮与大齿轮齿合,方筒前后侧各活动设有短杆,两短杆对称,每一短杆外端部设有臂摆,每一臂摆下端部设有配重,方筒右侧设有连杆和第二电机,第二电机输出轴、连杆一端的链轮与一短杆的链轮通过一链条相连,连杆另一端的链轮与另一短杆的链轮通过一链条相连,
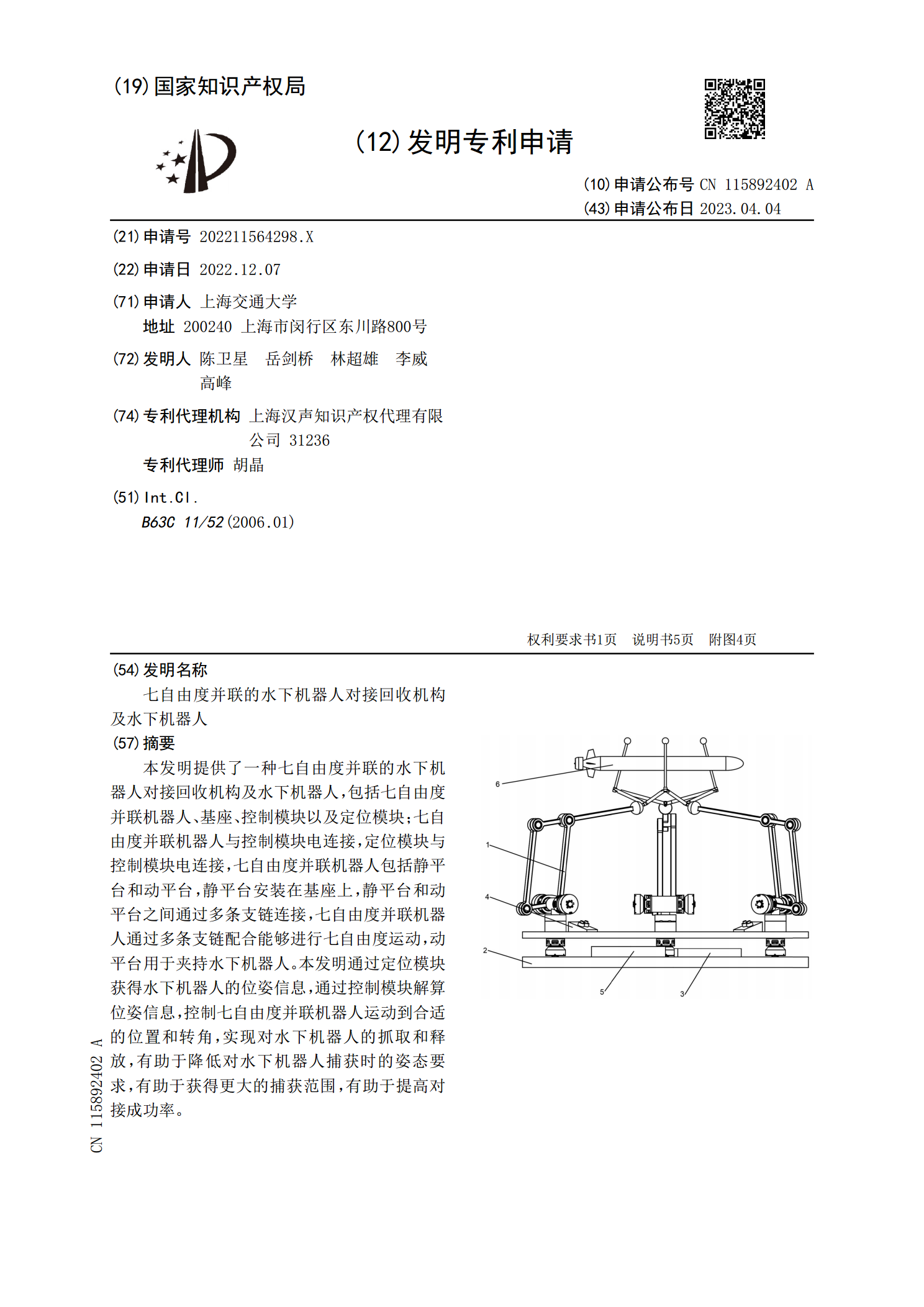
七自由度并联的水下机器人对接回收机构及水下机器人.pdf
本发明提供了一种七自由度并联的水下机器人对接回收机构及水下机器人,包括七自由度并联机器人、基座、控制模块以及定位模块;七自由度并联机器人与控制模块电连接,定位模块与控制模块电连接,七自由度并联机器人包括静平台和动平台,静平台安装在基座上,静平台和动平台之间通过多条支链连接,七自由度并联机器人通过多条支链配合能够进行七自由度运动,动平台用于夹持水下机器人。本发明通过定位模块获得水下机器人的位姿信息,通过控制模块解算位姿信息,控制七自由度并联机器人运动到合适的位置和转角,实现对水下机器人的抓取和释放,有助于降

二自由度轮-腿复合球面机构及水下机器人.pdf
本发明公开了一种二自由度轮-腿复合球面机构及水下机器人,属于机器人领域。所述二自由度轮-腿复合球面机构包括静平台和动平台,所述静平台和动平台之间设置有第一驱动支链、第二驱动支链和RUR中间运动传递支链。本发明中,第一驱动支链、第二驱动支链和RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
六自由度机器人.pdf
本科毕业设计(论文)FINALPROJECT/THESISOFUNDERGRADUATE(2014届)六自由度机器人机械机构设计学院机械工程学院专业机械设计制造及其自动化学生姓名**学号指导教师***完成日期2014年5月承诺书本人郑重承诺:所呈交的毕业论文“六自由度机器人机械结构设计”是在导师的指导下,严格按照学校和学院的有关规定由本人独立完成。文中所引用的观点和参考资料均已标注并加以注释。论文研究过程中不存在抄袭他人研究成果和伪造相关数据等行为。如若出现任何侵犯他人知识产权等问题,本人愿意承担相关法律