
一种仿生柔性拉形机.pdf

春兰****89


1/10

2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种仿生柔性拉形机.pdf
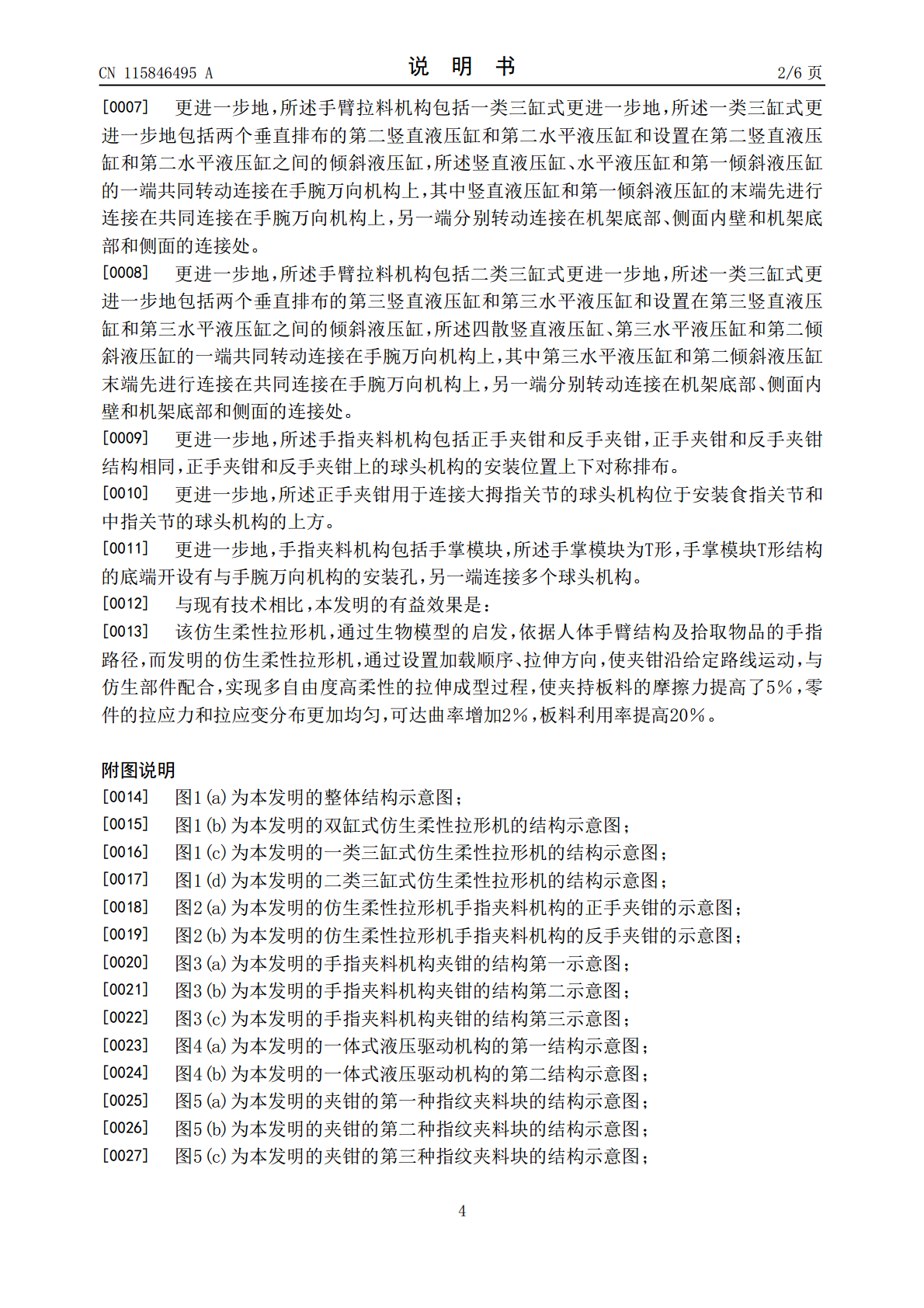
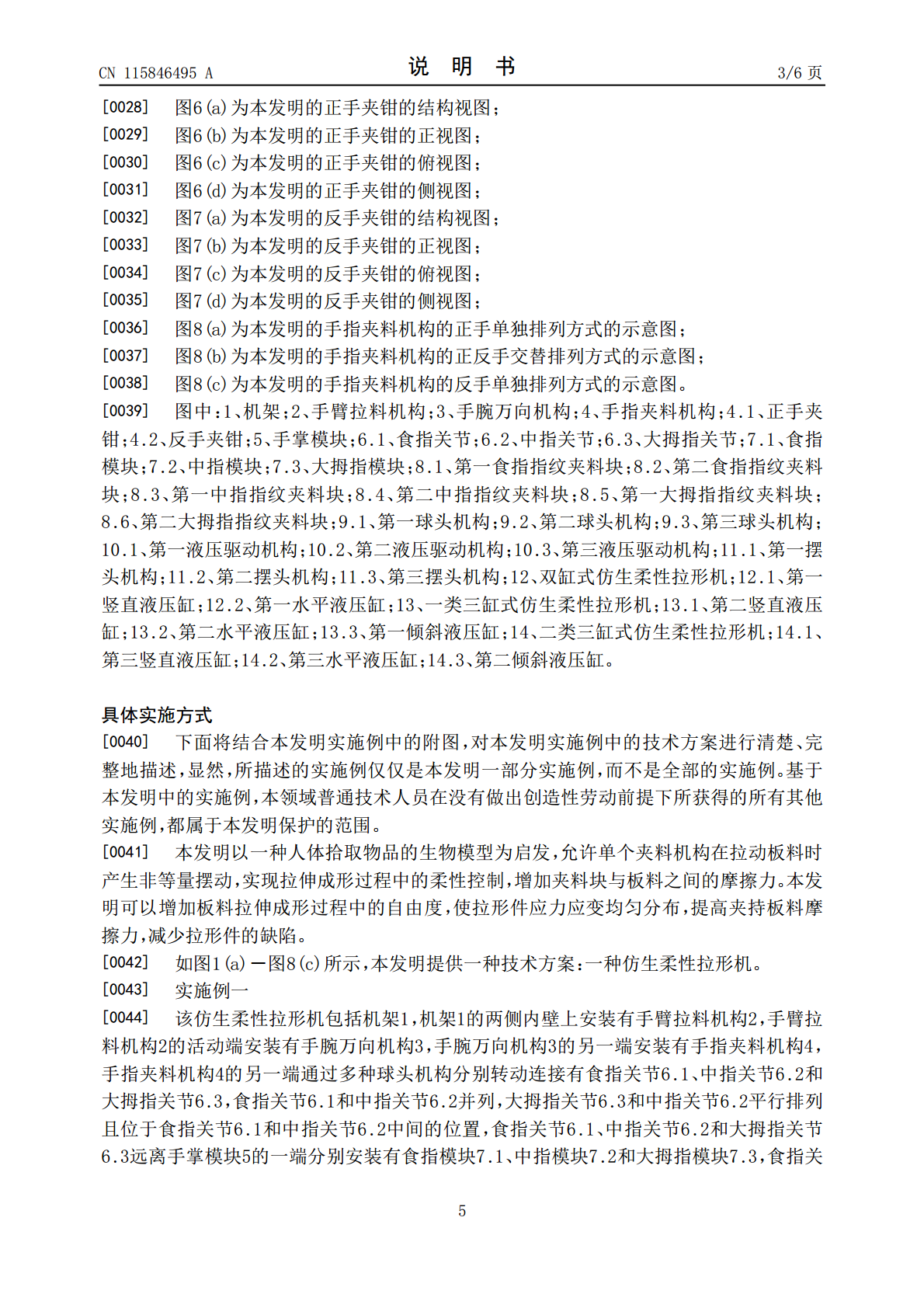
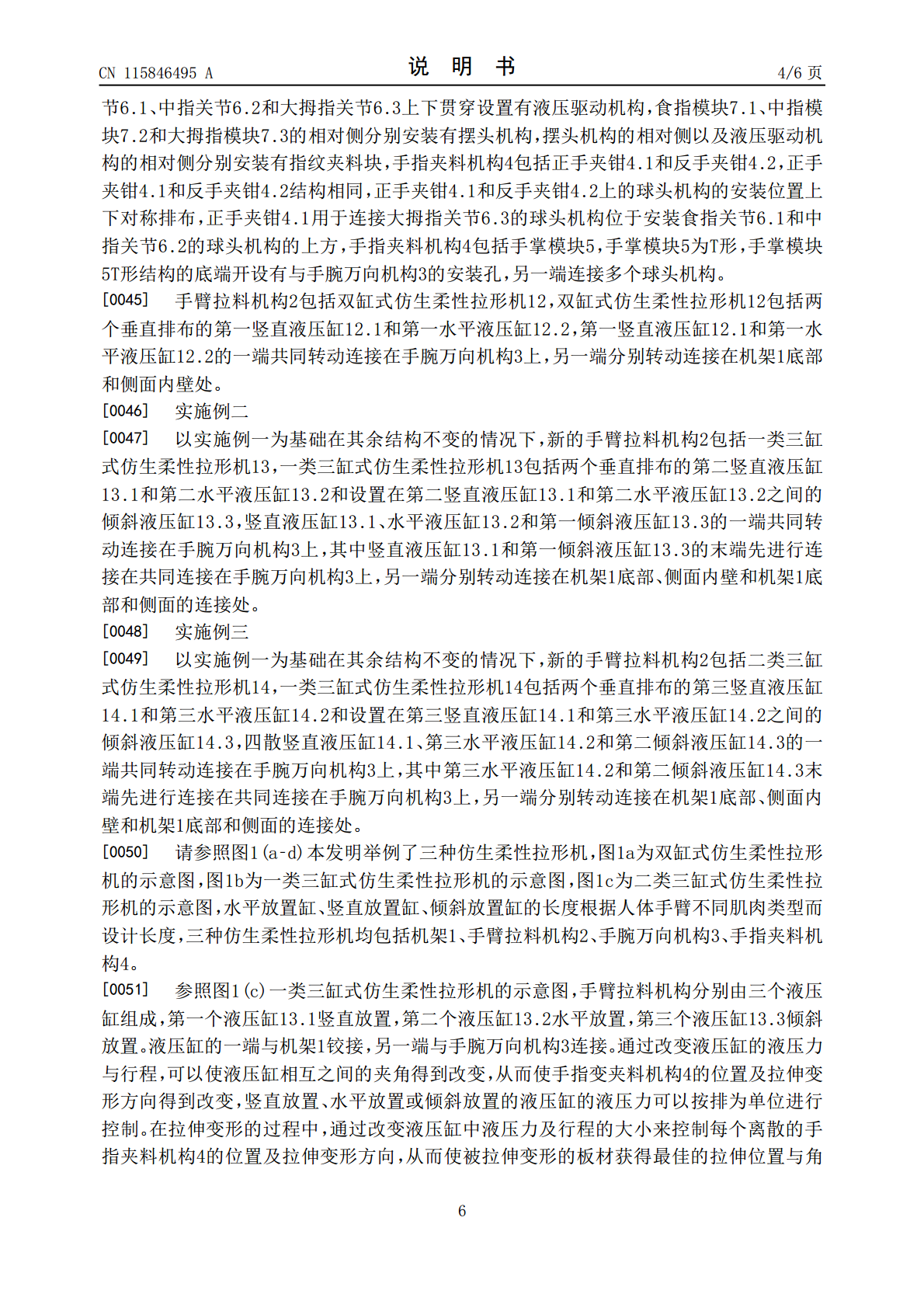
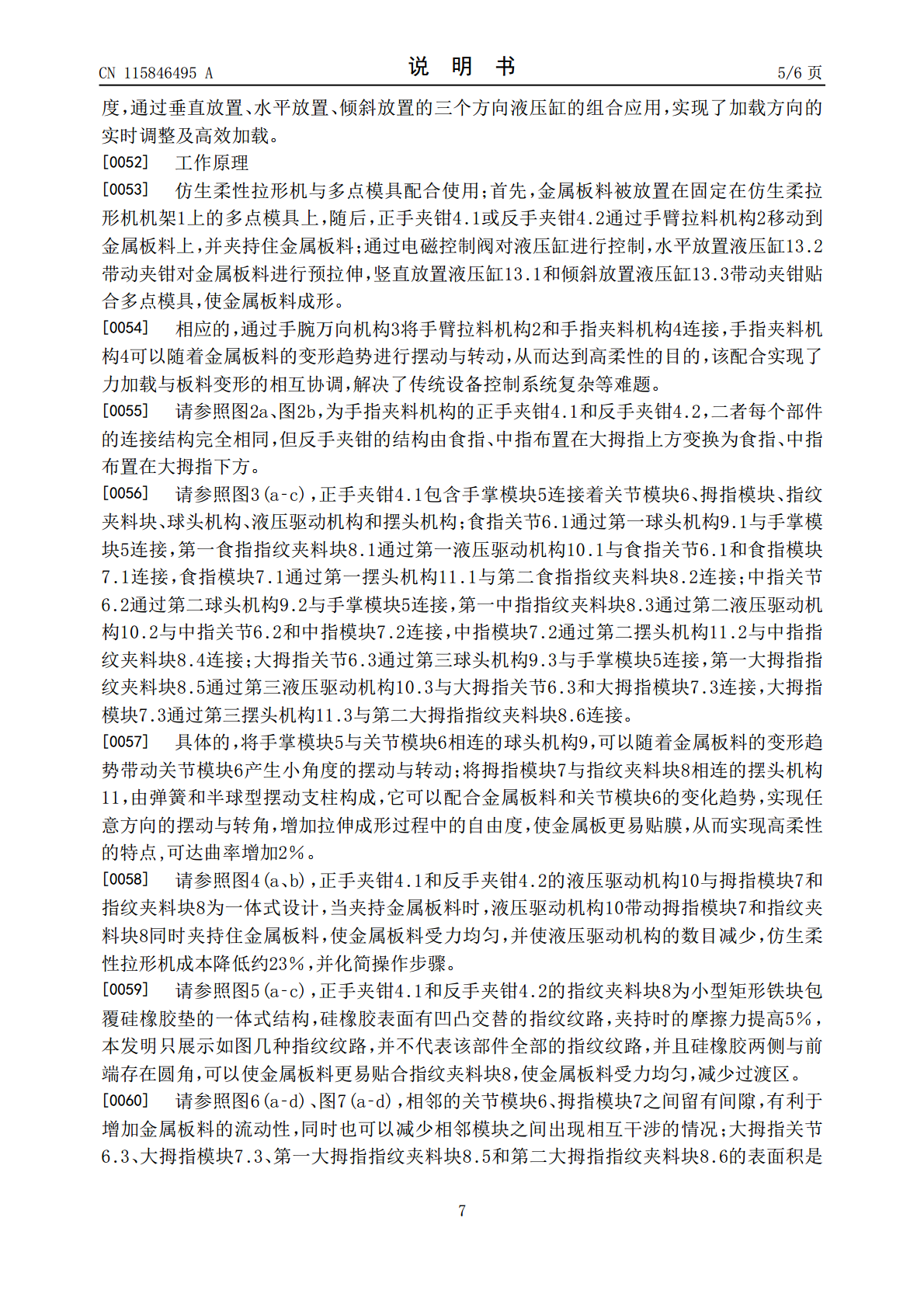
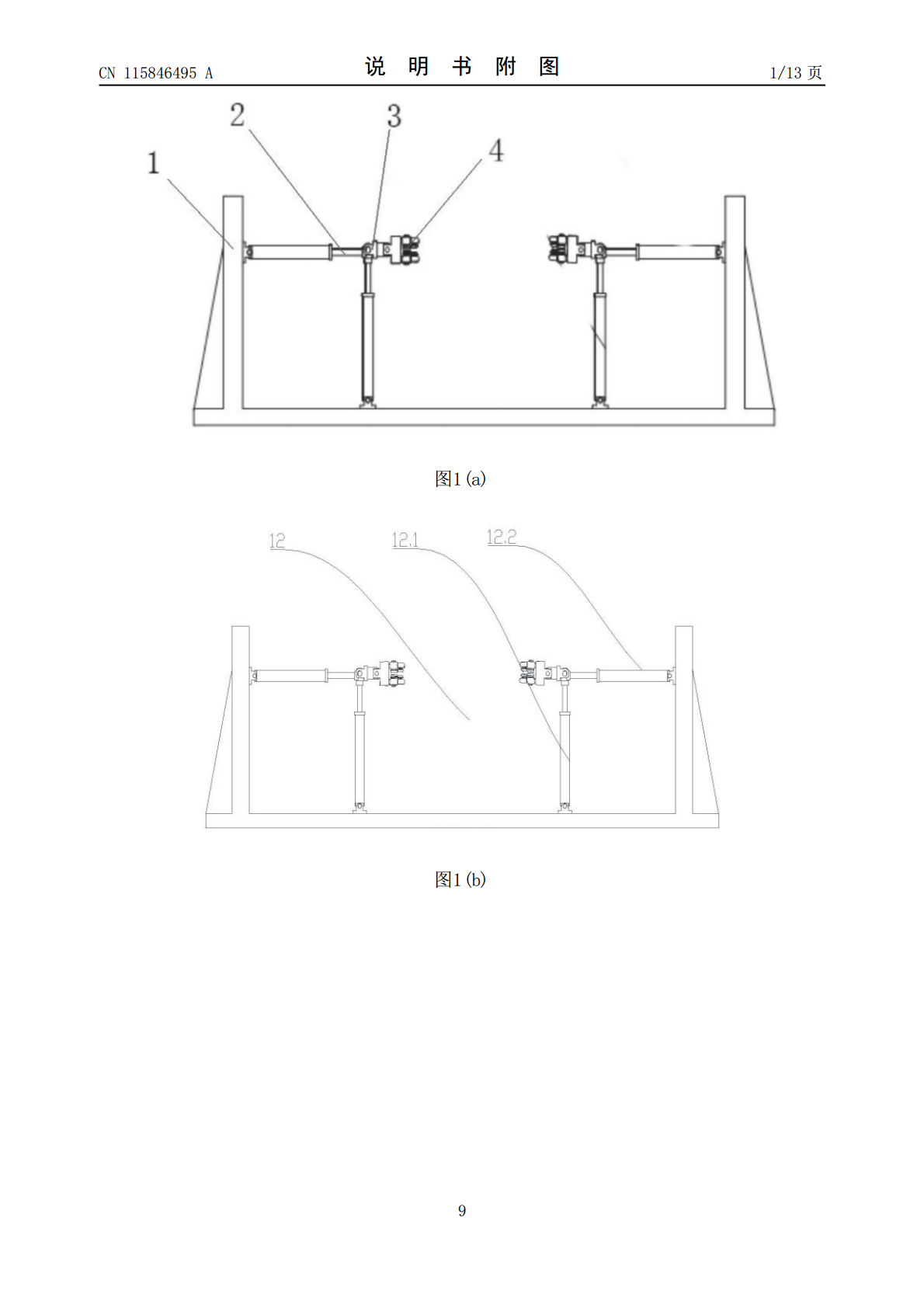
本发明公开了一种仿生柔性拉形机,涉及机械工程技术领域。包括机架,机架的两侧内壁上安装有手臂拉料机构,手臂拉料机构的活动端安装有手腕万向机构,手腕万向机构的另一端安装有手指夹料机构,手指夹料机构的另一端通过多种球头机构分别转动连接有食指关节、中指关节和大拇指关节,食指关节和中指关节并列。本发明通过生物模型的启发,依据人体手臂结构及拾取物品的手指路径,而发明的仿生柔性拉形机,通过设置加载顺序、拉伸方向,使夹钳沿给定路线运动,与仿生部件配合,实现多自由度高柔性的拉伸成型过程,使夹持板料的摩擦力提高了5%,零件的
一种高柔性仿生多点拉伸成形机.pdf
本发明公开了一种高柔性仿生多点拉伸成形机,涉及机械工程技术领域。包括机架,机架内部两侧分别安装有多个拉料机构,拉料机构的夹持端分别固定连接有夹料机构,夹料机构包括基础板,基础板一面开设有后部联接孔与拉料机构相连接,基础板的另一面上下两侧分别固定连接有箱体,两箱体相反侧分别固定连接有箱盖。本发明将仿生概念应用于塑性加工设备,拟合牙齿的形状以提高夹紧力,离散夹钳的设置能够使板料顺应模具曲面的变化移动或转动;离散的仿牙齿单元体在相同气压的作用下夹紧板料,贴合板料表面,可形曲面板料。离散的设置使板料的成形路径更加
一种仿兽爪电控永磁夹料机构及柔性拉形机.pdf
本发明公开了一种仿兽爪电控永磁夹料机构及柔性拉形机,涉及机械加工技术领域。包括一种仿兽爪电控永磁夹料机构及柔性拉形机,包括电控永磁夹料机构,电控永磁夹料机构括夹料架,夹料架顶部和底部内壁之间设置有多个弹性回复结构,两的弹性回复结构相对侧均固定连接有夹料板。本发明由于无法通过液压缸实现板料的分块夹紧,因此采用可以独立控制磁极单元的电控永磁技术进行板料夹持,也简化了液压伺服控制系统,降低了拉形机的制造成本。同时通过改变通入铝钴镍可逆永磁体激励电流的大小调节磁感应强度的大小,实现精确控制夹钳夹紧力的大小,防止拉

基于并联机构的多夹钳柔性拉形机的设计.docx
基于并联机构的多夹钳柔性拉形机的设计随着机器人技术的不断发展,柔性大变形机器人在工业领域中的应用也越来越广泛,其中多夹钳柔性拉形机作为柔性大变形机器人中的一种,具有较高的应用价值。其设计基于并联机构,能够在实现柔性大变形的同时,还能够实现较高的精度和稳定性。设计目标:本次设计的主要目标是设计一个多夹钳柔性拉形机,能够实现柔性大变形,同时能够保证较高的精度和稳定性。此外,还需保证机器人的可靠性和安全性。设计原理:该机器人采用基于并联机构的设计原理,基于并联机构的多夹钳柔性拉形机主要由两个子系统组成:柔性变形
一种仿生金属柔性车轮.pdf
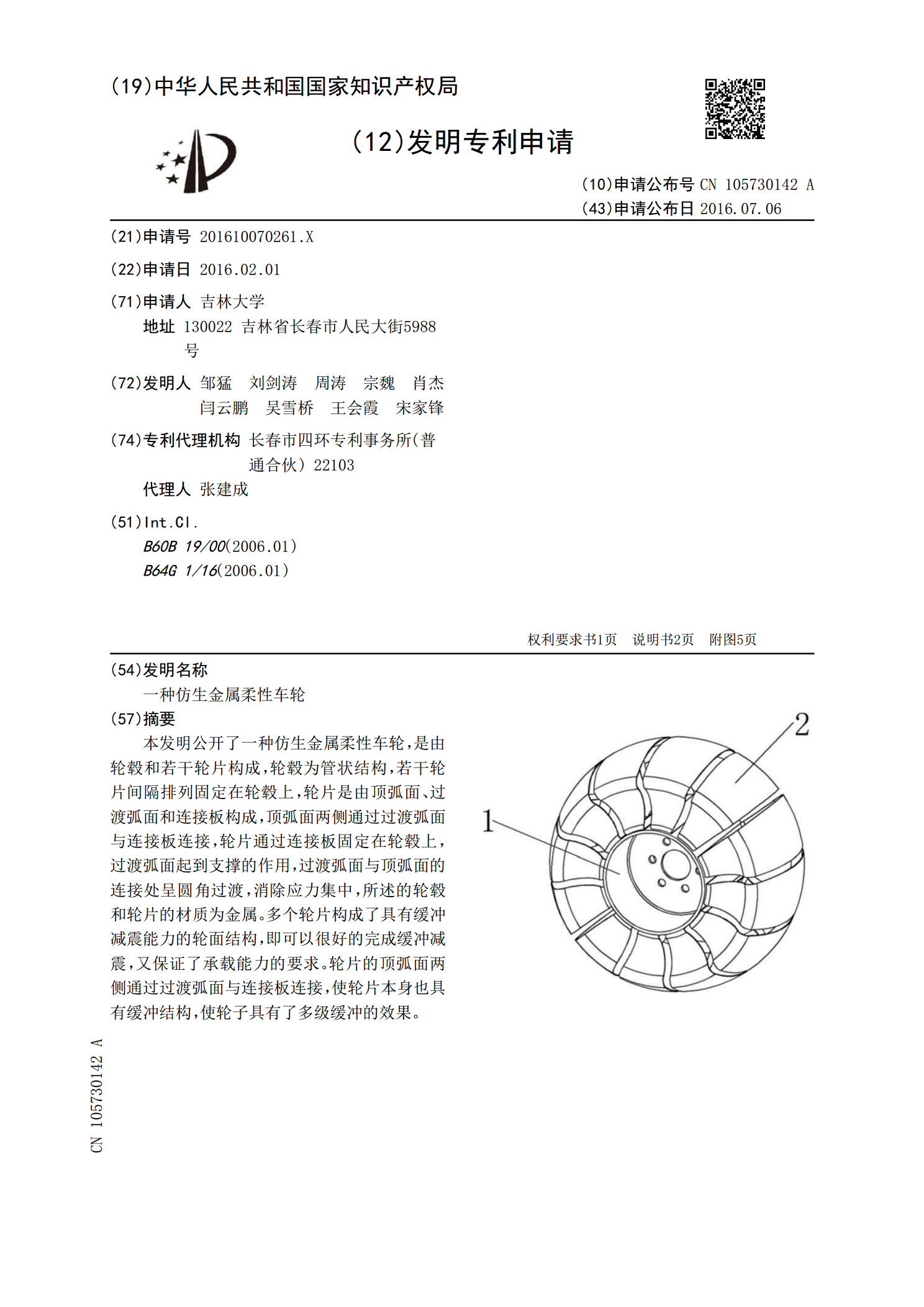
本发明公开了一种仿生金属柔性车轮,是由轮毂和若干轮片构成,轮毂为管状结构,若干轮片间隔排列固定在轮毂上,轮片是由顶弧面、过渡弧面和连接板构成,顶弧面两侧通过过渡弧面与连接板连接,轮片通过连接板固定在轮毂上,过渡弧面起到支撑的作用,过渡弧面与顶弧面的连接处呈圆角过渡,消除应力集中,所述的轮毂和轮片的材质为金属。多个轮片构成了具有缓冲减震能力的轮面结构,即可以很好的完成缓冲减震,又保证了承载能力的要求。轮片的顶弧面两侧通过过渡弧面与连接板连接,使轮片本身也具有缓冲结构,使轮子具有了多级缓冲的效果。