
一种高柔性仿生多点拉伸成形机.pdf

书生****写意

1/10

2/10
3/10
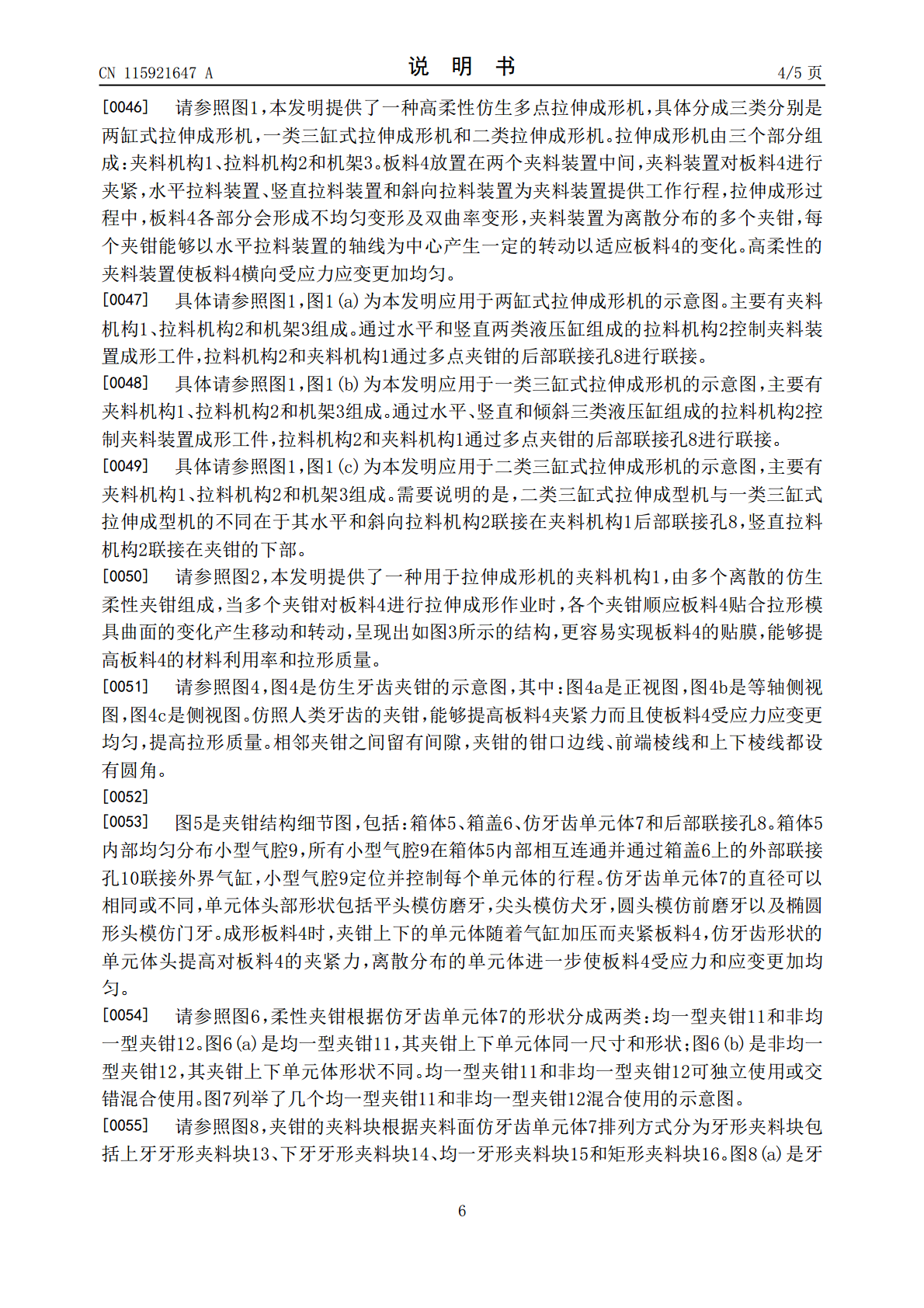
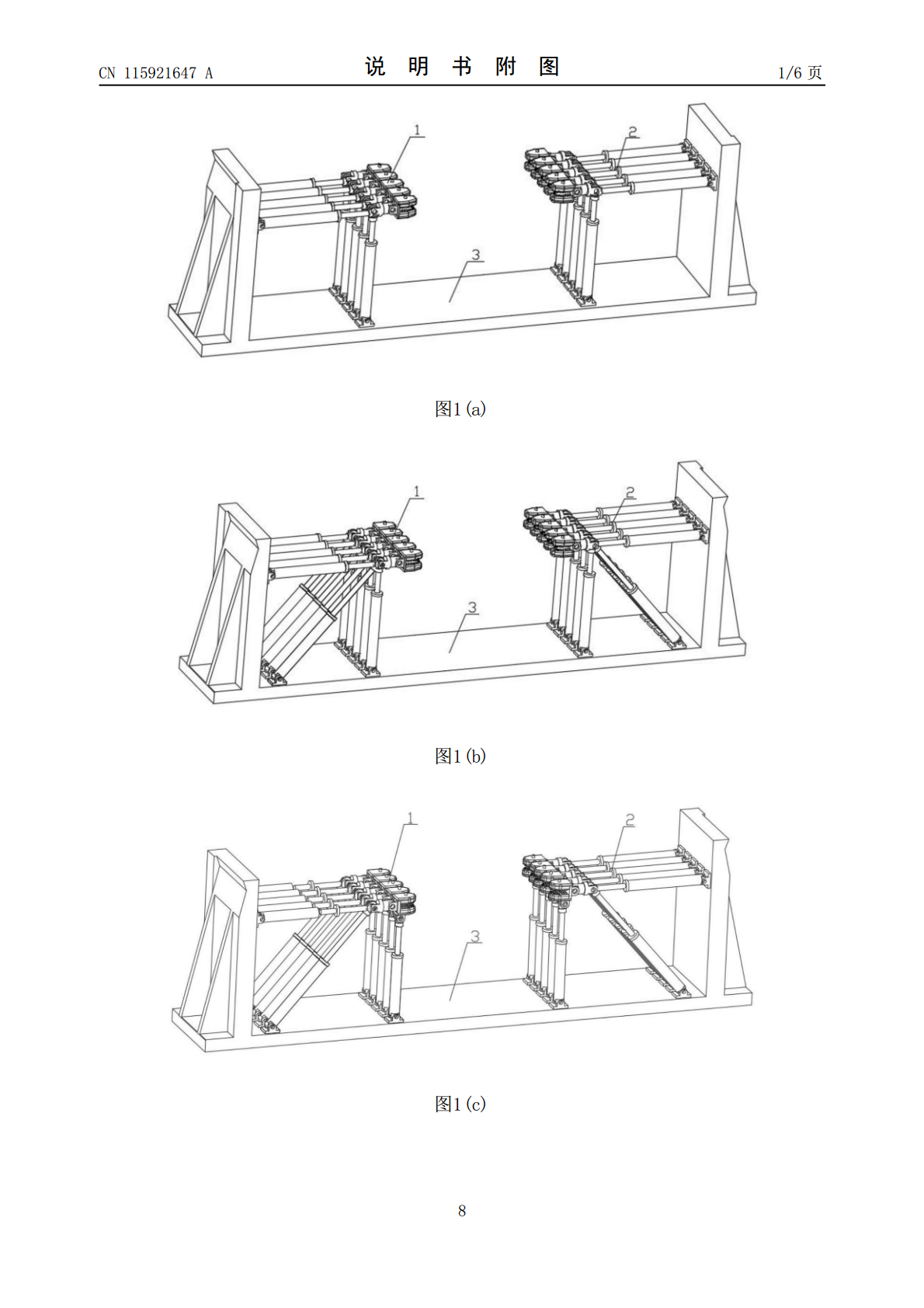
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高柔性仿生多点拉伸成形机.pdf
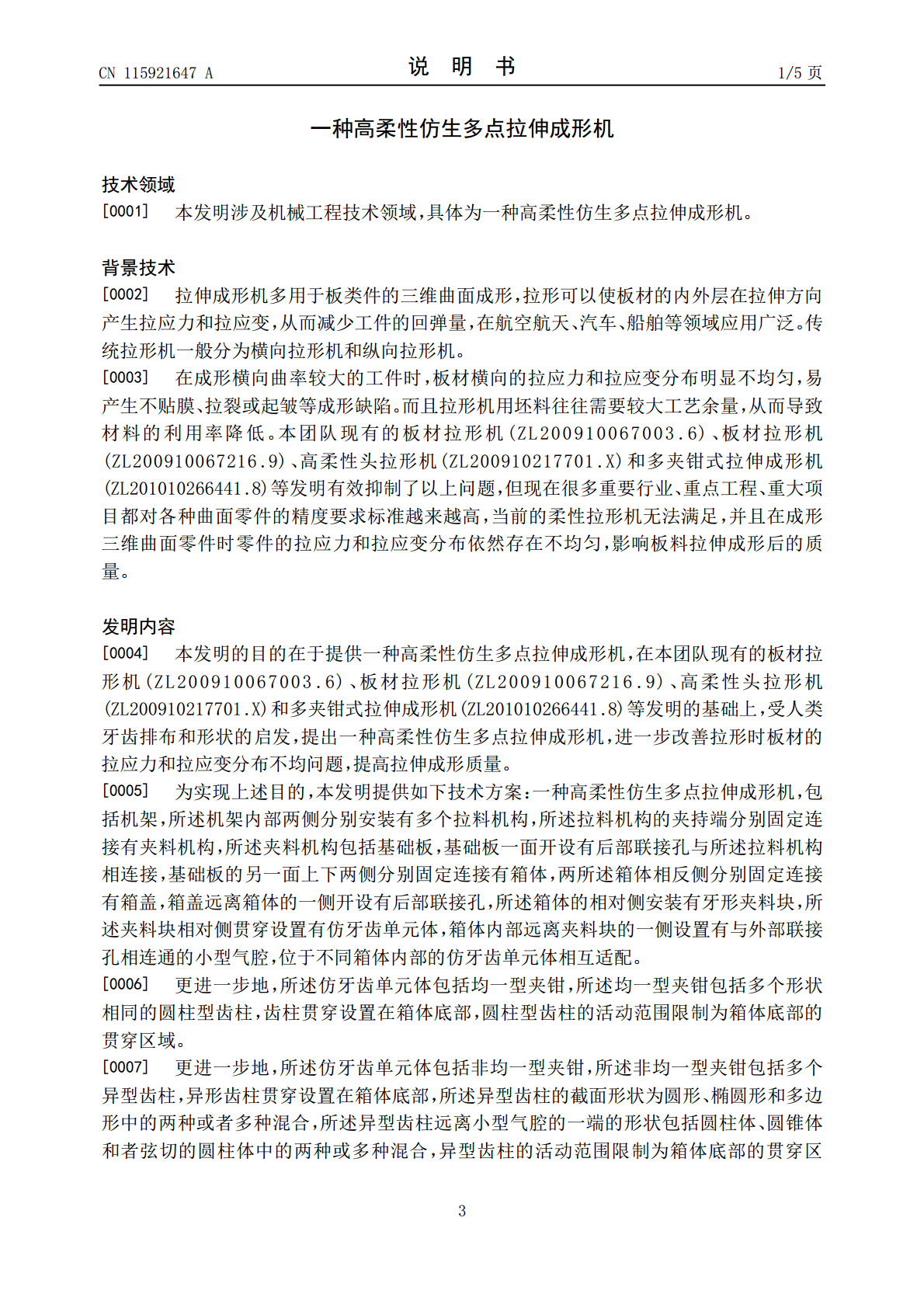
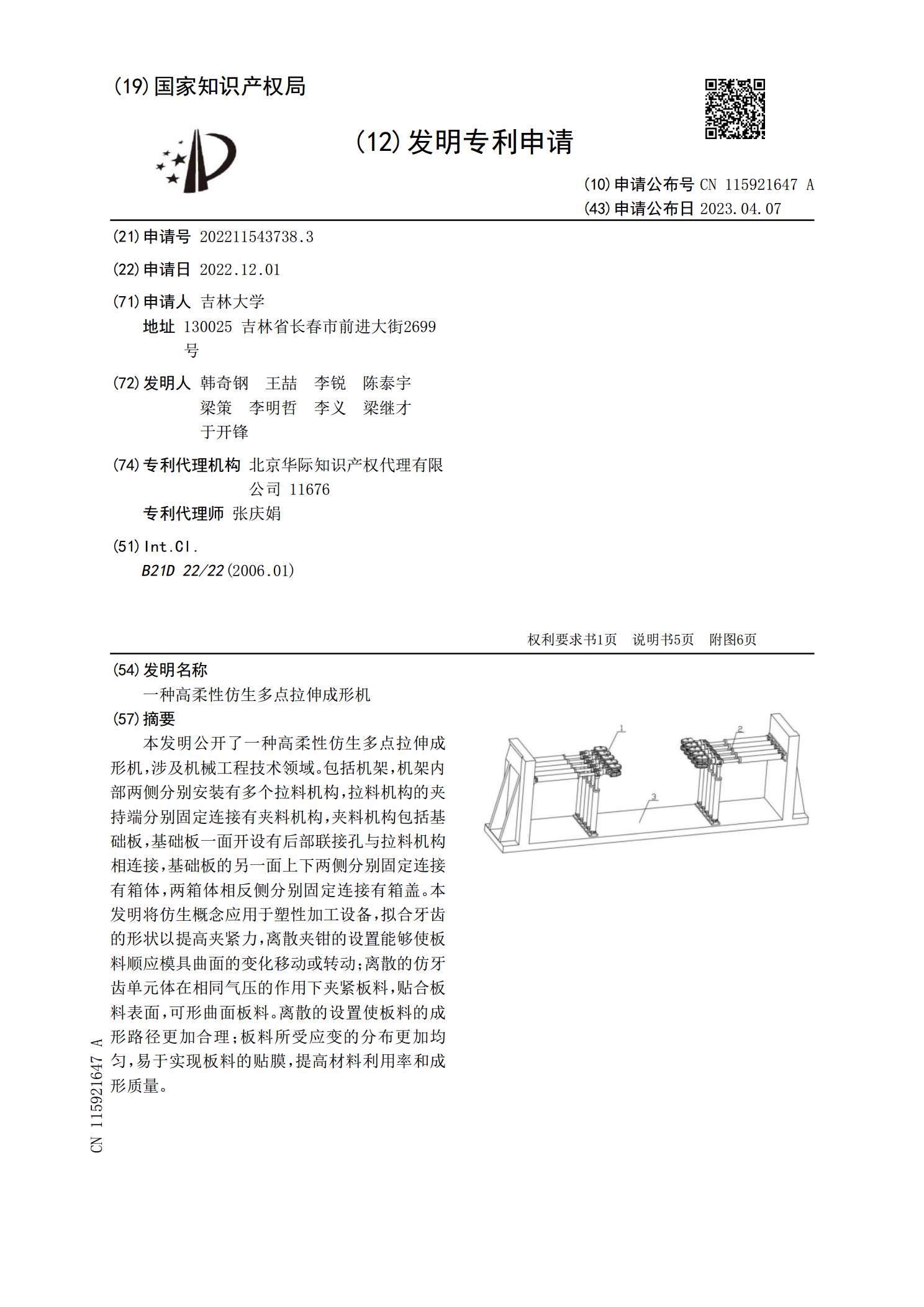
本发明公开了一种高柔性仿生多点拉伸成形机,涉及机械工程技术领域。包括机架,机架内部两侧分别安装有多个拉料机构,拉料机构的夹持端分别固定连接有夹料机构,夹料机构包括基础板,基础板一面开设有后部联接孔与拉料机构相连接,基础板的另一面上下两侧分别固定连接有箱体,两箱体相反侧分别固定连接有箱盖。本发明将仿生概念应用于塑性加工设备,拟合牙齿的形状以提高夹紧力,离散夹钳的设置能够使板料顺应模具曲面的变化移动或转动;离散的仿牙齿单元体在相同气压的作用下夹紧板料,贴合板料表面,可形曲面板料。离散的设置使板料的成形路径更加

一种微成形拉伸机.pdf
本发明公开了一种微成形拉伸机,实现了拉伸过程自动化、读取数据智能化和设备尺寸微小化。该拉伸机包括:伺服电机、齿轮机构、自润滑轴承、上丝杠、下丝杠、左拉伸机构、拉伸头、夹紧装置、位移传感器、右拉伸机构、机座、丝杠自润滑轴承座和齿轮自润滑轴承座。本发明实现了拉伸过程自动化,能够拉伸厚度0.01-0.1mm,宽度1-0mm的材料,操作方便快捷,读数智能,准确可靠。
一种仿生柔性拉形机.pdf
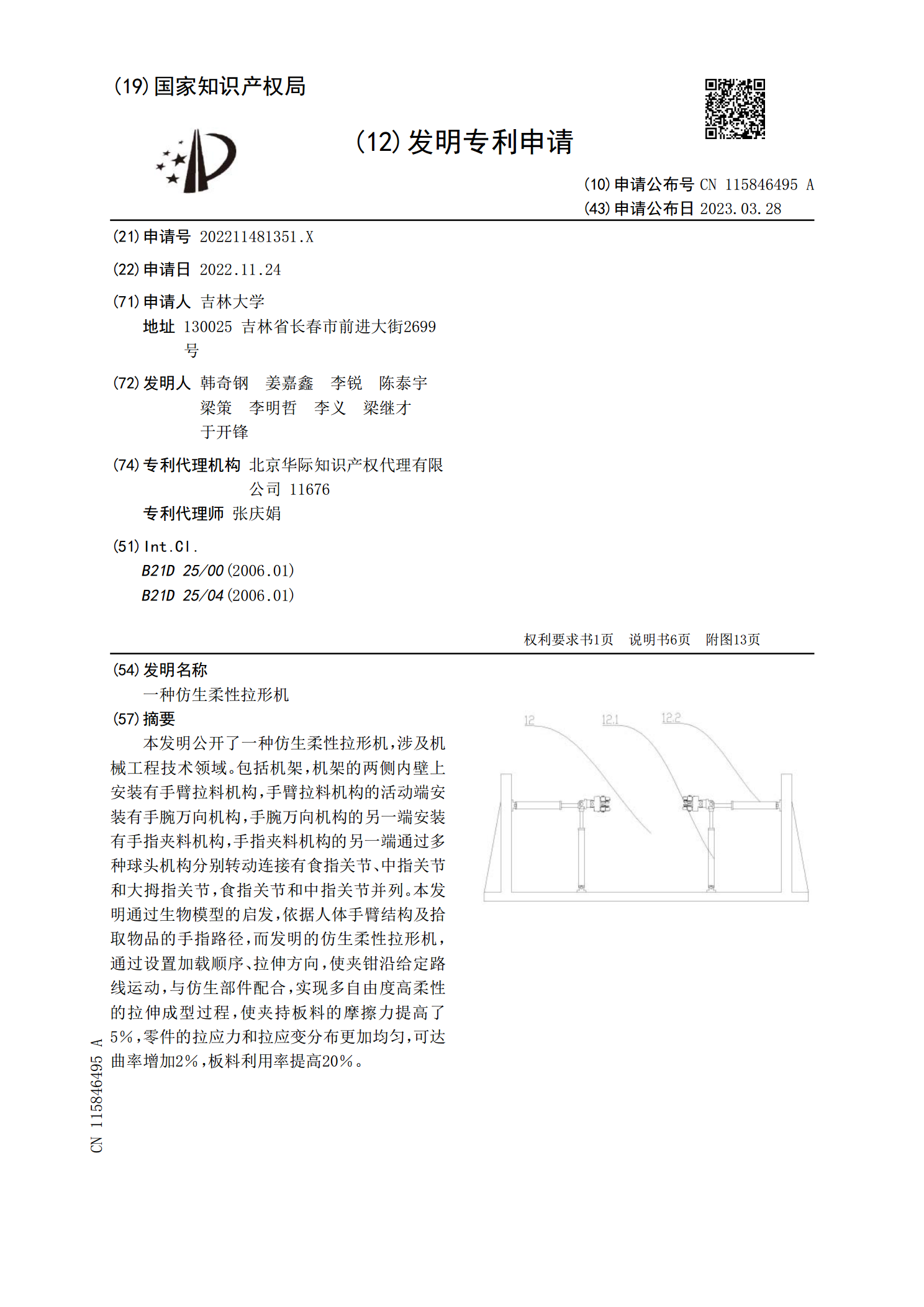
本发明公开了一种仿生柔性拉形机,涉及机械工程技术领域。包括机架,机架的两侧内壁上安装有手臂拉料机构,手臂拉料机构的活动端安装有手腕万向机构,手腕万向机构的另一端安装有手指夹料机构,手指夹料机构的另一端通过多种球头机构分别转动连接有食指关节、中指关节和大拇指关节,食指关节和中指关节并列。本发明通过生物模型的启发,依据人体手臂结构及拾取物品的手指路径,而发明的仿生柔性拉形机,通过设置加载顺序、拉伸方向,使夹钳沿给定路线运动,与仿生部件配合,实现多自由度高柔性的拉伸成型过程,使夹持板料的摩擦力提高了5%,零件的

板材柔性拉伸成形研究进展与展望.docx
板材柔性拉伸成形研究进展与展望标题:板材柔性拉伸成形研究进展与展望摘要:板材柔性拉伸成形是一种新型的成形技术,它以其独特的优点在制造业领域吸引了广泛的关注。本论文围绕板材柔性拉伸成形技术的研究进展进行了系统的综述,探讨了其在材料科学、力学以及制造工艺等方面的应用。同时,本文还分析了柔性拉伸成形技术面临的挑战,并对未来的研究方向进行了展望。一、引言板材柔性拉伸成形技术是一种通过施加拉伸力对板材进行塑性变形的方法,它能够实现复杂形状的制造,并具有资源节约、环境友好等突出优点。近年来,随着材料、力学和工艺等领域

用于柔性拉伸成形机的仿关节自由度可控推拉机构.pdf
本发明公开了用于柔性拉伸成形机的仿关节自由度可控推拉机构,由拉料部、仿关节连接部和夹料部依次铰接组成,仿关节连接部由肘关节杆与腕关节杆可拆卸地固定连接组成,肘关节杆与拉料部之间通过双球面铰接形成仿人体上肢的“肘关节”,仿关节连接部相对于拉料部仅在一个方向上摆动;腕关节杆与夹料部之间通过单球面铰接形成仿人体上肢的“腕关节”,仿关节连接部相对于夹料部在多个方向上旋转或摆动。本发明通过模仿人体上肢的“肘关节”和“腕关节”相配合的运动组合部件,在不影响钳体实现柔性拉伸成形所需的灵活度的前提下,对钳体运动的自由度进