
基于并联机构的多夹钳柔性拉形机的设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于并联机构的多夹钳柔性拉形机的设计.docx
基于并联机构的多夹钳柔性拉形机的设计随着机器人技术的不断发展,柔性大变形机器人在工业领域中的应用也越来越广泛,其中多夹钳柔性拉形机作为柔性大变形机器人中的一种,具有较高的应用价值。其设计基于并联机构,能够在实现柔性大变形的同时,还能够实现较高的精度和稳定性。设计目标:本次设计的主要目标是设计一个多夹钳柔性拉形机,能够实现柔性大变形,同时能够保证较高的精度和稳定性。此外,还需保证机器人的可靠性和安全性。设计原理:该机器人采用基于并联机构的设计原理,基于并联机构的多夹钳柔性拉形机主要由两个子系统组成:柔性变形

多夹钳式板材柔性拉形工艺的数值模拟.docx
多夹钳式板材柔性拉形工艺的数值模拟一、引言板材柔性拉形工艺是现代制造业中非常重要的一种成形加工工艺。在生产过程中,常用的拉形工艺有单面拉形和双面拉形两种。然而,双面拉形在加工效率和准确度等方面比单面拉形更有优势。本文将对多夹钳式板材柔性拉形工艺的数值模拟进行探讨,并且通过模拟验证分析运用多夹钳工艺的优势以及其在双面拉形中的应用。二、多夹钳式板材柔性拉形工艺概述1.多夹钳式板材柔性拉形工艺的定义多夹钳式板材柔性拉形工艺指通过多个夹钳协同拉伸实现板材柔性成形的拉形工艺。在这个过程中,多个夹钳动作的协调可以实现

基于柔性放大机构的压电微夹钳研究.docx
基于柔性放大机构的压电微夹钳研究摘要本研究通过基于柔性放大机构的压电微夹钳进行了探究。首先,分析了压电材料及其基本原理,详细介绍了压电效应在微夹钳中的应用。其次,提出了基于柔性放大机构的压电微夹钳的设计方案,并利用有限元分析进行验证。最后,进行了实验验证,并探究了夹持力与外加电压之间的关系。关键词:压电效应,微夹钳,柔性放大机构,有限元分析,夹持力。AbstractInthisstudy,weexploredtheuseofpiezoelectricmicro-grippersbasedonflexibl

基于柔性铰链的并联机构性能研究与优化设计的中期报告.docx
基于柔性铰链的并联机构性能研究与优化设计的中期报告一、研究背景与意义并联机构是一种多自由度机构,具有高刚度、高精度和高灵活性等优点,被广泛应用于机器人、航空航天、精密加工等领域。而柔性铰链则是一种新型的机器人柔性连接器件,具有高柔性、重量轻、尺寸小、自适应能力强等特点,可以在机器人末端实现大范围的位姿调节和柔性控制,有望成为未来柔性机器人的重要组成部分。通过将柔性铰链与并联机构相结合,可以进一步增强并联机构的柔性和自适应性,提高系统性能和灵活度,因此具有重要的研究价值和实际应用前景。然而目前相关研究仍处于
一种仿生柔性拉形机.pdf
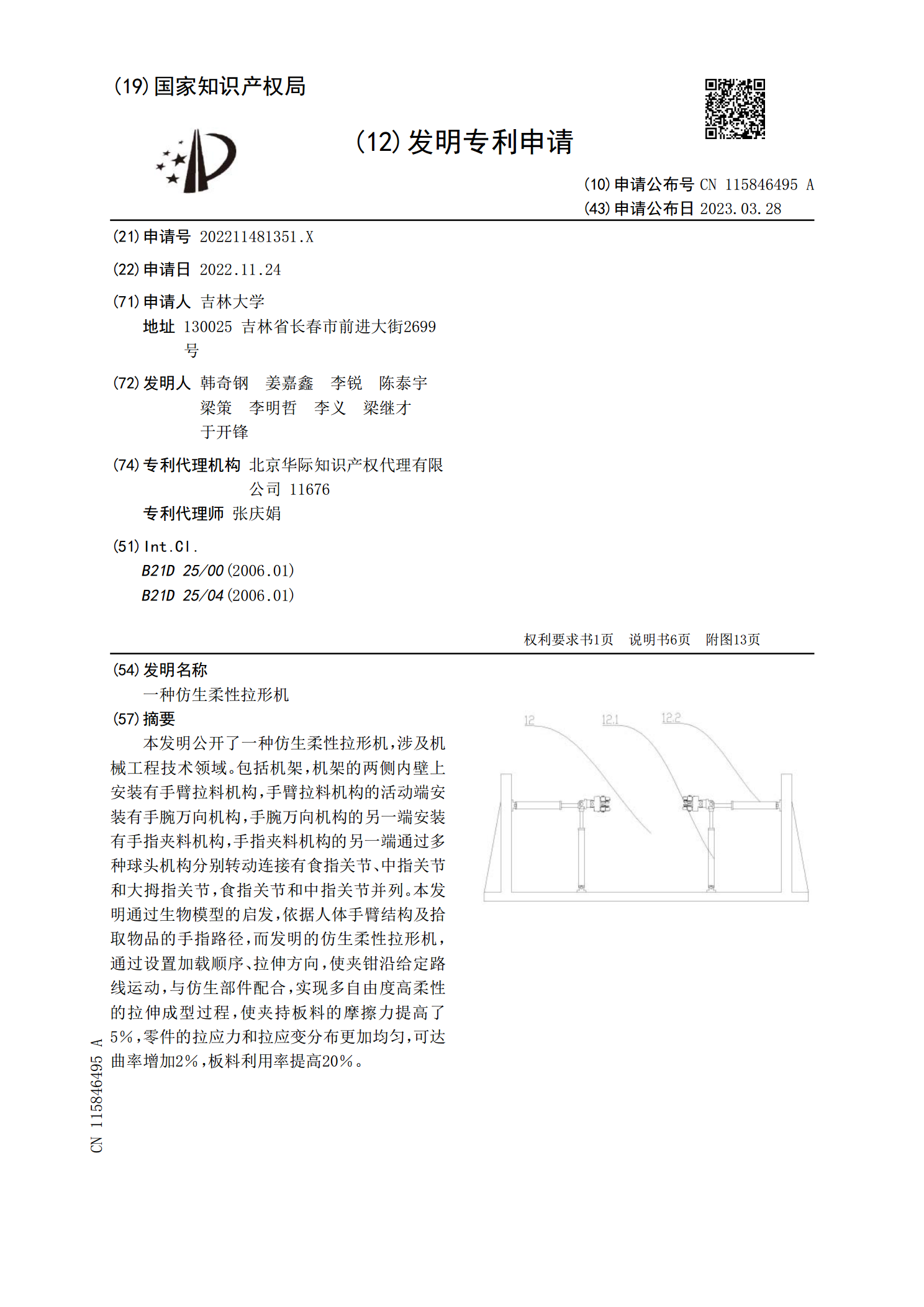
本发明公开了一种仿生柔性拉形机,涉及机械工程技术领域。包括机架,机架的两侧内壁上安装有手臂拉料机构,手臂拉料机构的活动端安装有手腕万向机构,手腕万向机构的另一端安装有手指夹料机构,手指夹料机构的另一端通过多种球头机构分别转动连接有食指关节、中指关节和大拇指关节,食指关节和中指关节并列。本发明通过生物模型的启发,依据人体手臂结构及拾取物品的手指路径,而发明的仿生柔性拉形机,通过设置加载顺序、拉伸方向,使夹钳沿给定路线运动,与仿生部件配合,实现多自由度高柔性的拉伸成型过程,使夹持板料的摩擦力提高了5%,零件的