
一种机器人称重投料装置.pdf

飞飙****ng


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人称重投料装置.pdf
本发明公开一种机器人称重投料装置,包括机器人本体、装料箱及重量传感器,所述机器人本体设置有收纳腔,所述装料箱顶部开口、底部设置有出料口,所述出料口设置有出料电动阀,所述装料箱置于收纳腔内,所述装料箱通过驱动机构从所述收纳腔伸出,所述机器人本体靠近收纳腔出口的一侧设置有防倾倒机构;所述重量传感器用于感应装料箱内物料的重量值并将重量值传输至所述机器人本体,所述机器人本体基于所述重量值控制所述出料电动阀开启或关闭,所述机器人本体用于控制所述驱动机构、防倾倒机构工作。

一种自动称重复核投料装置.pdf
本发明公开了一种自动称重复核投料装置,包括机架、控制显示单元、称重机构、送料机构和卸料机构,机架用于固定支撑其余的功能机构,控制显示单元用于控制其他功能机构,称重机构用于对饲料包进行称重、计件以及累计计重等,送料机构用于将称重好的饲料包运送至卸料机构上,卸料机构用于对饲料包进行卸料。该装置结构简单,自动化程度高,使用方便,能实现饲料的自动称重、计重、计件和投料。
一种机器人抓钩投料装置.pdf
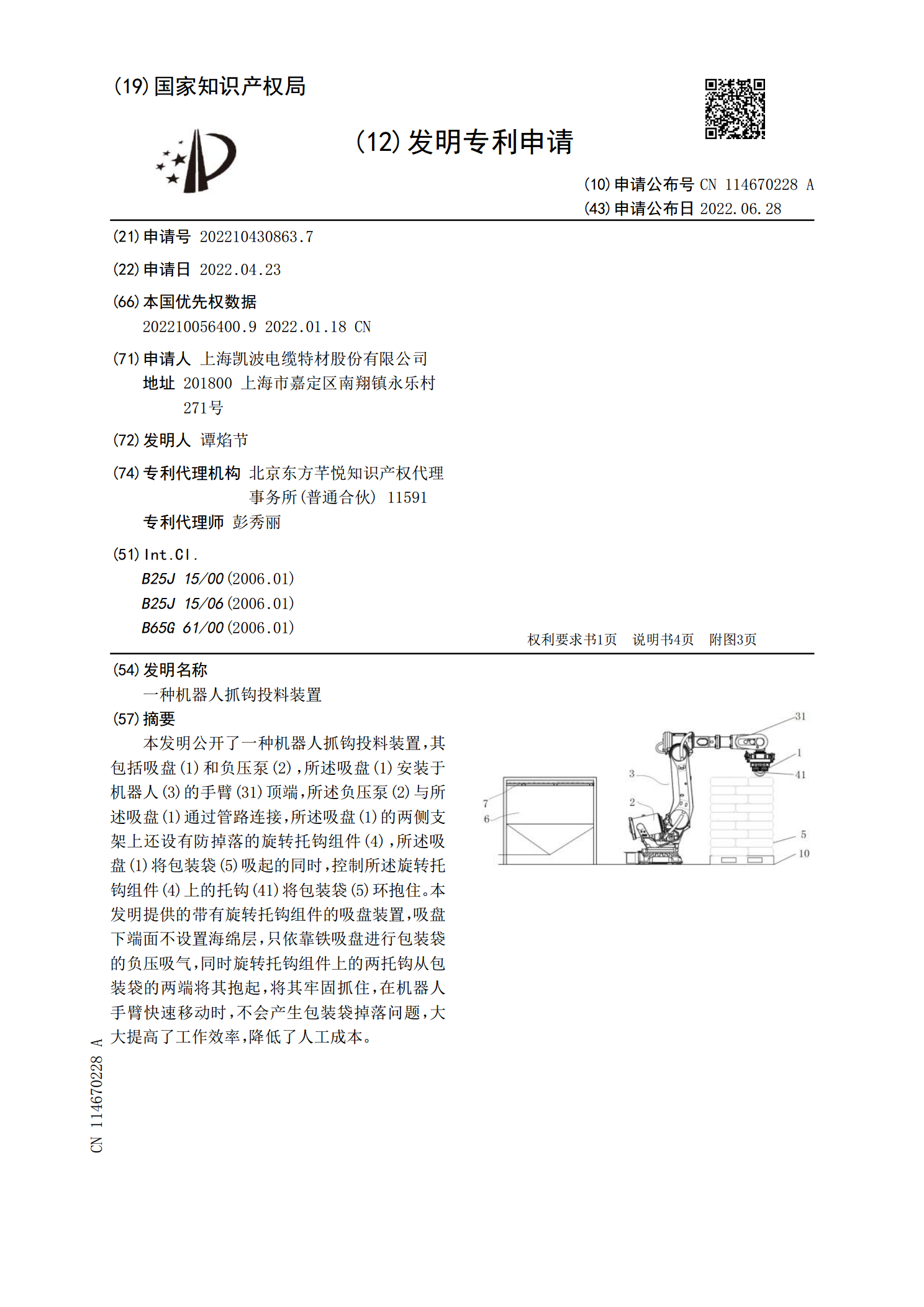
本实用新型公开了一种机器人抓钩投料装置,其包括吸盘(1)和负压泵(2),所述吸盘(1)安装于机器人(3)的手臂(31)顶端,所述负压泵(2)与所述吸盘(1)通过管路连接,所述吸盘(1)的两侧支架上还设有防掉落的旋转托钩组件(4),所述吸盘(1)将包装袋(5)吸起的同时,控制所述旋转托钩组件(4)上的托钩(41)将包装袋(5)环抱住。本实用新型提供的带有旋转托钩组件的吸盘装置,吸盘下端面不设置海绵层,只依靠铁吸盘进行包装袋的负压吸气,同时旋转托钩组件上的两托钩从包装袋的两端将其抱起,将其牢固抓住,在机器人手

一种炼钢合金及渣料自动下料称重投料装置及方法.pdf
本发明涉及一种炼钢合金及渣料自动下料称重投料装置及方法,属于炼钢冶金技术领域。技术方案是:钢结构支架(7)的中部设有小车轨道(6),称重给料小车(2)设置在小车轨道上,称重给料小车上设有称重装置,称重给料小车匹配有小车振动给料机(1);钢结构支架上部设有多个料仓(4),每个料仓的下方均设有料仓振动给料机(3),料仓振动给料机通过悬挂机构(5)设置,所述称重给料小车设有下料管道,小车振动给料机1与下料管道布置在一起,多个料仓振动给料机的下料管道共同匹配一个称重给料小车。本发明优点和效果:使得精炼炉在精炼时高

一种饲料传送装置及智能投料机器人.pdf
本申请公开了一种饲料传送装置及智能投料机器人,饲料传送装置包括围栏、饲料转盘和底座;其中,围栏为中空结构,用于将饲料限定于饲料转盘上;饲料转盘上设有传输孔,用于限定饲料转盘上传输至下料口的饲料量;底座上设有下料口,当饲料转盘的传输孔与下料口对准时,饲料转盘的传输孔中承载的饲料从下料口落下;围栏包括下料阻挡部,下料阻挡部设置于下料口上方,用于阻挡饲料转盘上除了传输孔中容纳的饲料以外的其余饲料进入下料口。用户仅需将饲料直接投放至饲料转盘上,无需在多个饲料容纳腔中分别放料,减少放料的繁琐操作,同时基于下料阻挡部