
柔性驱动单元和柔性驱动器.pdf

猫巷****永安


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
柔性驱动单元和柔性驱动器.pdf
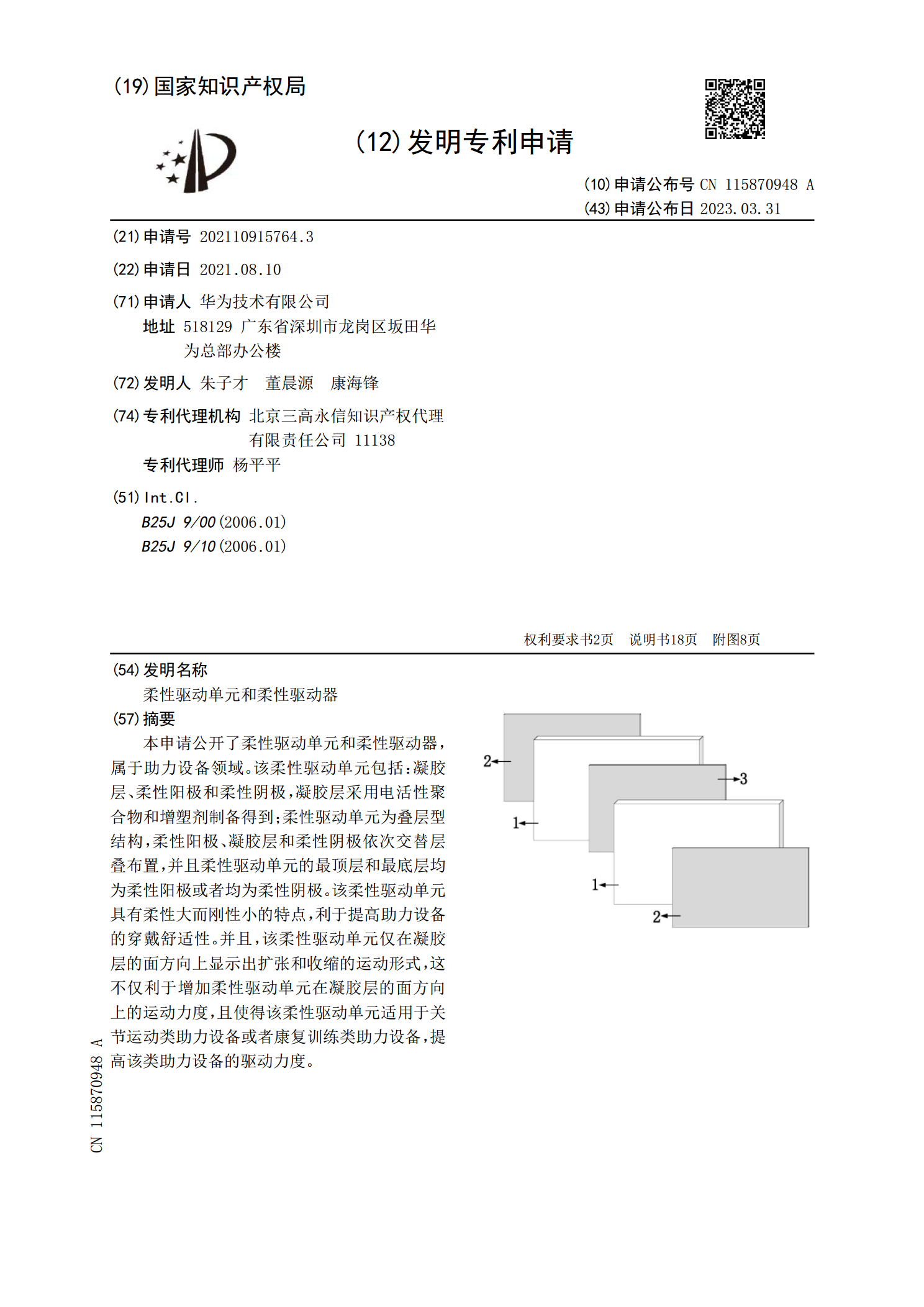
本申请公开了柔性驱动单元和柔性驱动器,属于助力设备领域。该柔性驱动单元包括:凝胶层、柔性阳极和柔性阴极,凝胶层采用电活性聚合物和增塑剂制备得到;柔性驱动单元为叠层型结构,柔性阳极、凝胶层和柔性阴极依次交替层叠布置,并且柔性驱动单元的最顶层和最底层均为柔性阳极或者均为柔性阴极。该柔性驱动单元具有柔性大而刚性小的特点,利于提高助力设备的穿戴舒适性。并且,该柔性驱动单元仅在凝胶层的面方向上显示出扩张和收缩的运动形式,这不仅利于增加柔性驱动单元在凝胶层的面方向上的运动力度,且使得该柔性驱动单元适用于关节运动类助力
变刚度柔性驱动器.pdf
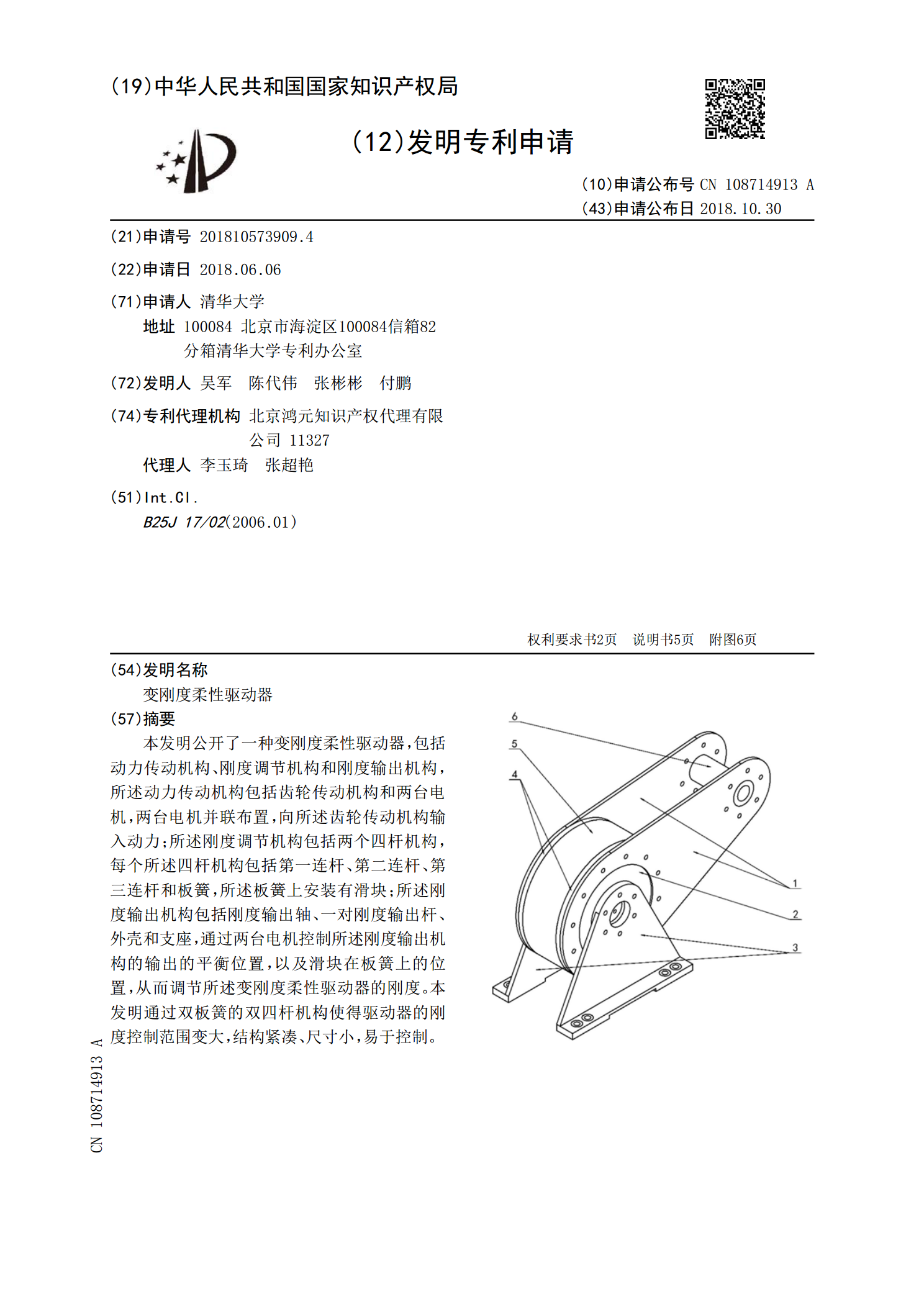
本发明公开了一种变刚度柔性驱动器,包括动力传动机构、刚度调节机构和刚度输出机构,所述动力传动机构包括齿轮传动机构和两台电机,两台电机并联布置,向所述齿轮传动机构输入动力;所述刚度调节机构包括两个四杆机构,每个所述四杆机构包括第一连杆、第二连杆、第三连杆和板簧,所述板簧上安装有滑块;所述刚度输出机构包括刚度输出轴、一对刚度输出杆、外壳和支座,通过两台电机控制所述刚度输出机构的输出的平衡位置,以及滑块在板簧上的位置,从而调节所述变刚度柔性驱动器的刚度。本发明通过双板簧的双四杆机构使得驱动器的刚度控制范围变大,
一种柔性钢带驱动器.pdf
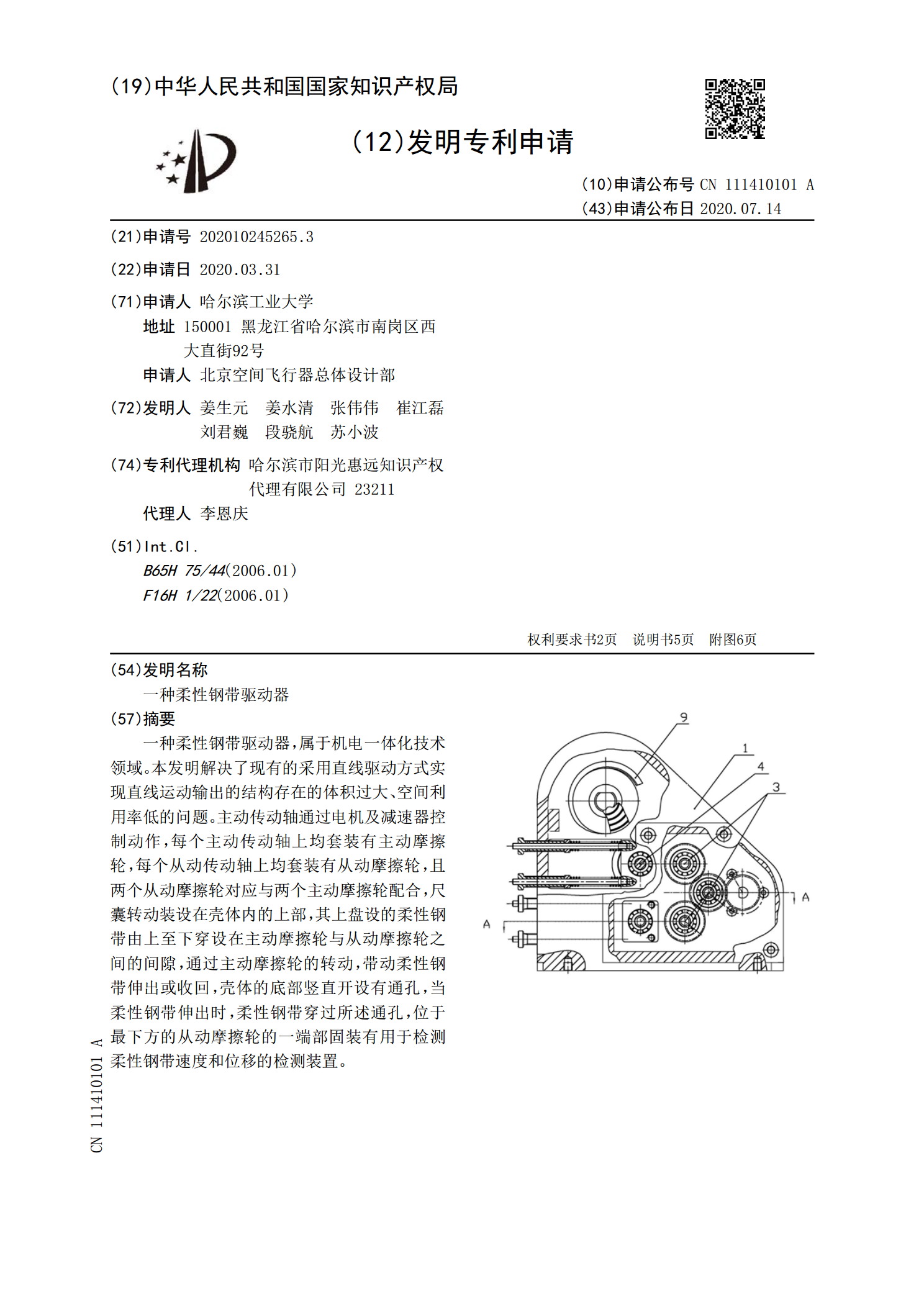
一种柔性钢带驱动器,属于机电一体化技术领域。本发明解决了现有的采用直线驱动方式实现直线运动输出的结构存在的体积过大、空间利用率低的问题。主动传动轴通过电机及减速器控制动作,每个主动传动轴上均套装有主动摩擦轮,每个从动传动轴上均套装有从动摩擦轮,且两个从动摩擦轮对应与两个主动摩擦轮配合,尺囊转动装设在壳体内的上部,其上盘设的柔性钢带由上至下穿设在主动摩擦轮与从动摩擦轮之间的间隙,通过主动摩擦轮的转动,带动柔性钢带伸出或收回,壳体的底部竖直开设有通孔,当柔性钢带伸出时,柔性钢带穿过所述通孔,位于最下方的从动摩

刚度可调的柔性关节驱动器机构.pdf
本发明公开了一种刚度可调的柔性关节驱动器机构,该驱动器机构分为驱动端、调整端和柔性关节三部分。其中驱动端为柔性关节运动提供动力,调整端负责改变柔性关节的刚度,柔性关节则起到减缓冲击、调节刚度的作用。附带有驱动电机,能够主动驱动关节运动;采用曲斜面-转轮配合结构的变刚度系统,摩擦阻力小,传动精密;安装有四个绝对式编码器,工作过程中实现有效检测,灵敏度高,故障率低;外壳全封闭,结构紧凑,能够在恶劣的环境下工作;从极大柔性到完全刚性,关节刚度的变化线性可控。

柔性印刷电路组件和包括该柔性印刷电路组件的盘驱动器.pdf
本发明涉及一种柔性印刷电路组件和包括该柔性印刷电路组件的盘驱动器。一种柔性印刷电路组件包括:柔性印刷电路板,其包括基底部分和从基底部分的第一边缘延伸并且能够相对于基底部分弯曲的中继部分;第一加强构件,其设置在中继部分处;以及第二加强构件,其附接到基底部分的第一区域并且具有啮合部分,所述基底部分的第一区域包括与第一边缘相对的第二边缘。基底部分的第一区域能够折叠回朝向包括第一边缘的基底部分的第二区域,并且第二加强构件的啮合部分能够与第一加强构件啮合。