
一种倒车辅助方法、系统及汽车.pdf

高格****gu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种倒车辅助方法、系统及汽车.pdf
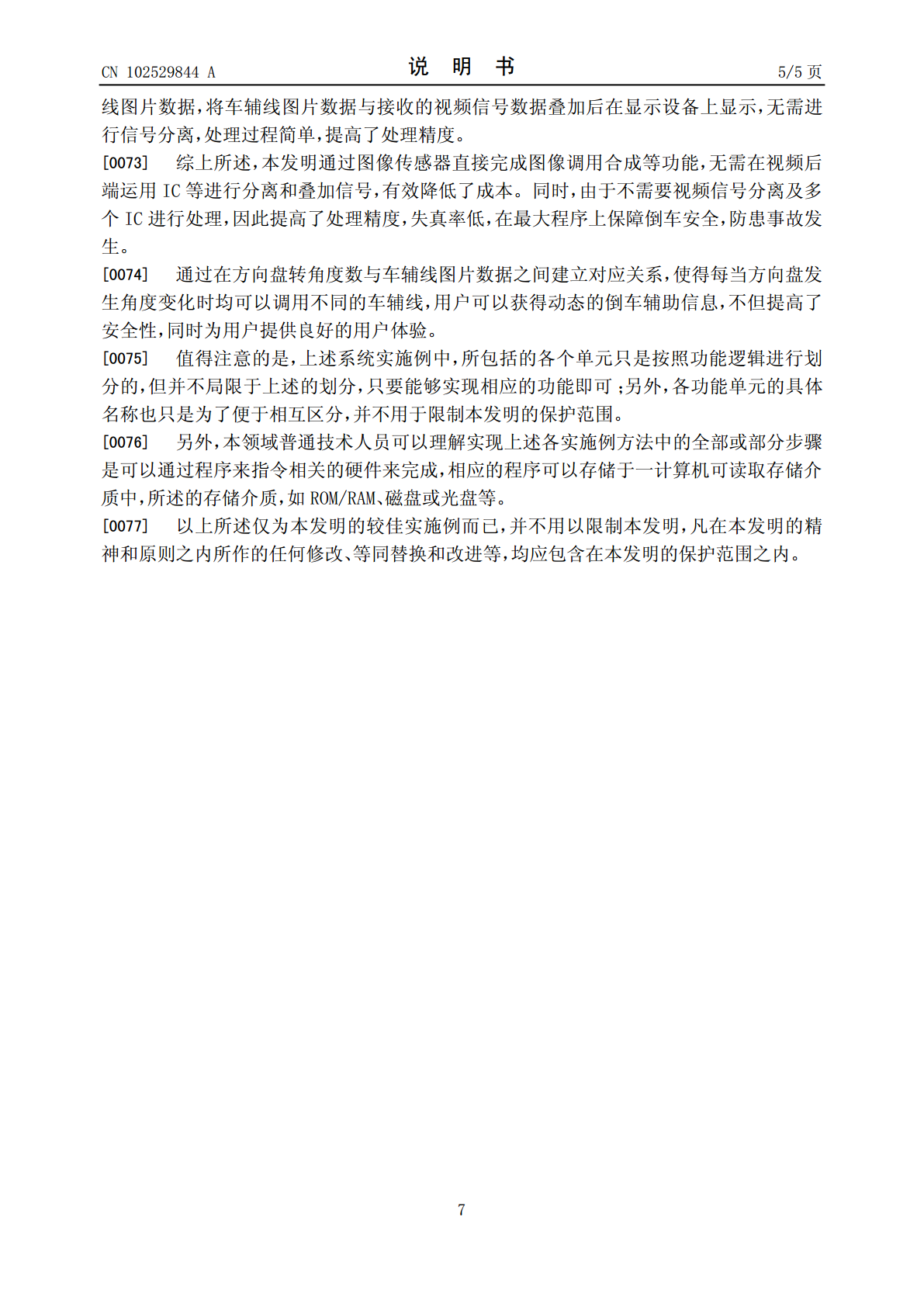
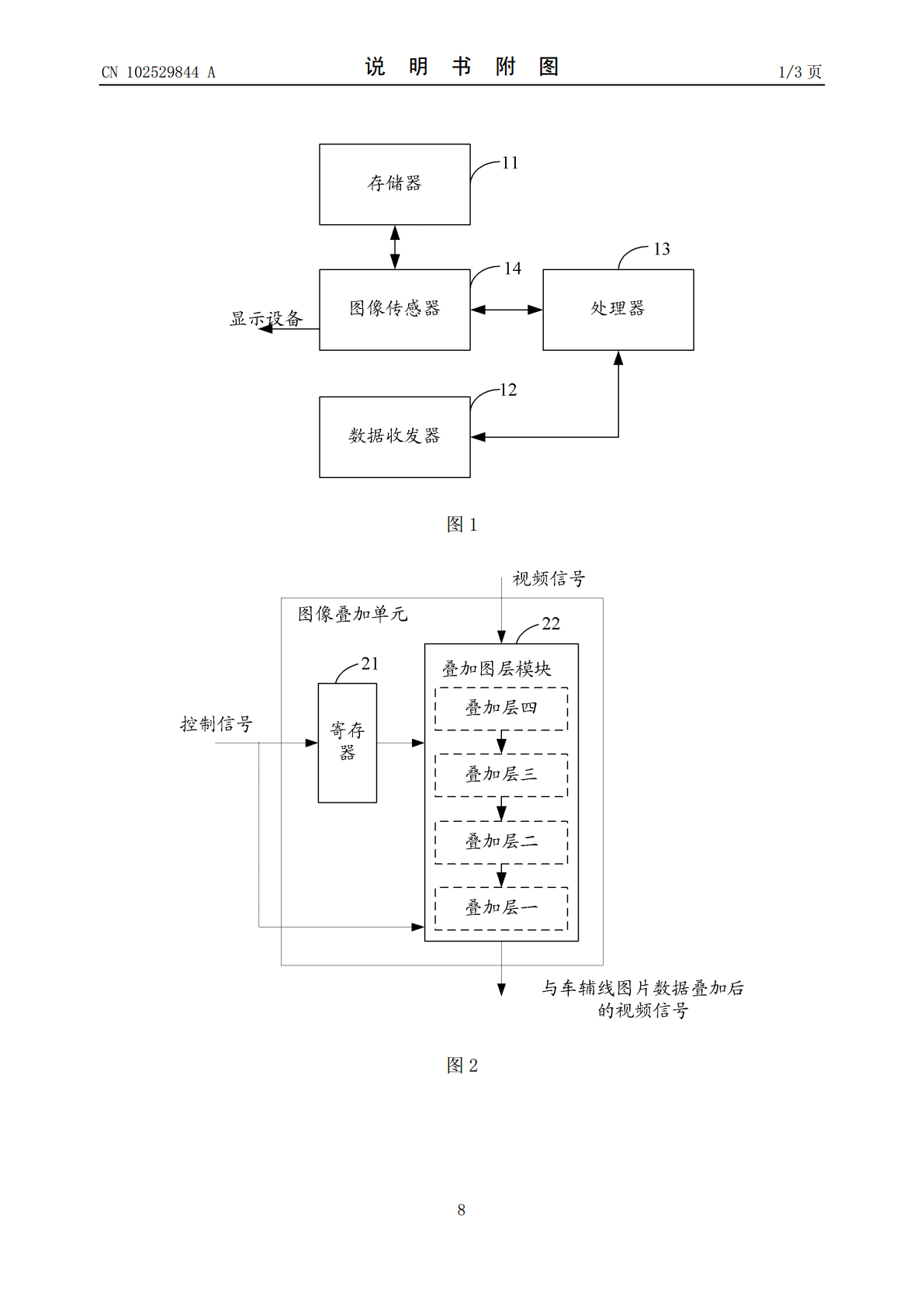
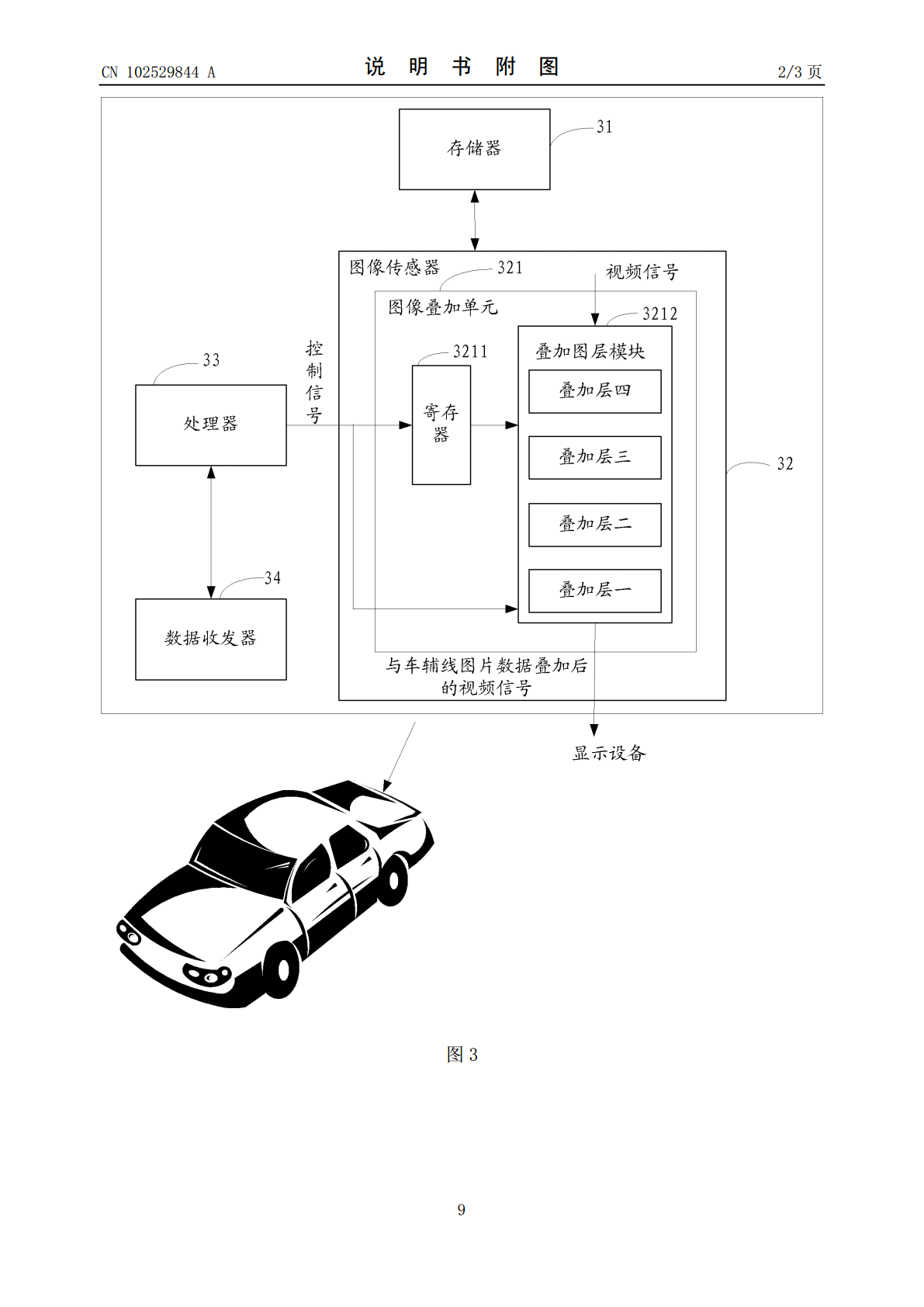
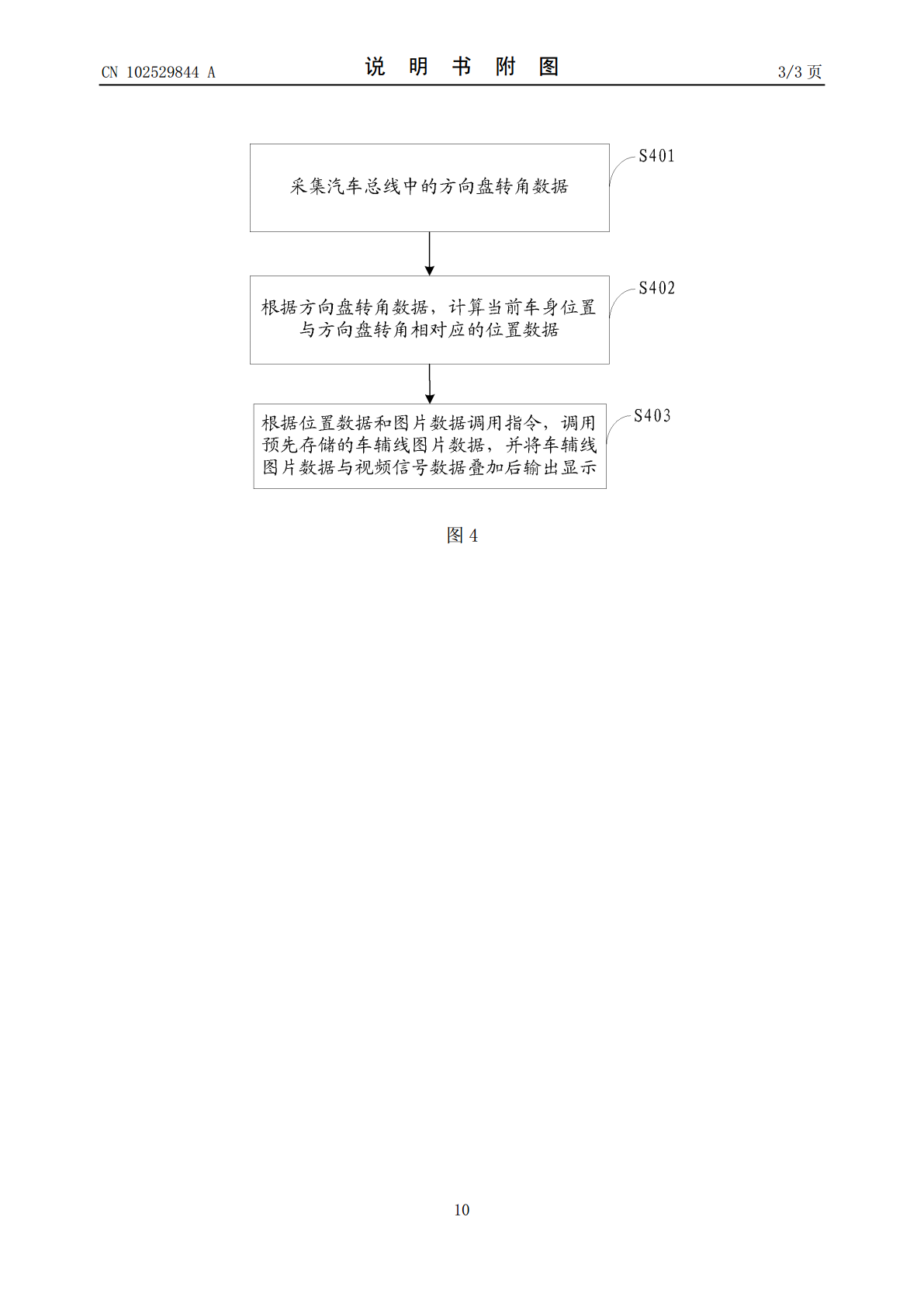
本发明适用于汽车电子领域,提供了一种倒车辅助方法、系统及汽车,所述系统包括存储器,用于存储车辅线图片数据,所述数据收发器,用于采集汽车总线中的方向盘转角数据,将所述方向盘转角数据发送给所述处理器,所述处理器,用于计算当前车身位置与所述方向盘转角数据相对应的位置数据,将所述位置数据写入所述图像传感器,并向所述图像传感器发送图片数据调用指令,所述图像传感器,用于将所述车辅线图片数据与视频信号数据叠加,输出给显示设备。本发明通过有效降低了系统成本。同时,由于不需要视频信号分离及多个IC进行处理,因此提高了处理精

一种倒车辅助提醒系统及方法.pdf
本发明公开了一种倒车辅助提醒系统及方法,所述系统包括雷达数据采集模块、倒车影像采集模块,系统还包括数据处理控制器、娱乐主机,所述雷达数据采集模块、倒车影像采集模块分别与数据处理控制器连接,用于分别将采集的倒车雷达数据、倒车影像数据发送至数据处理控制器中,所述数据处理控制器将雷达测量的障碍物数据与倒车影像结合输出带有障碍物信息的倒车影像至娱乐主机,所述娱乐主机通过车载中控屏显示带有障碍物信息的倒车影响。本发明的优点在于:通过倒车影像和雷达的数据融合来给出更加准确、可靠且容易查看的倒车影像数据,从而提升用户体

倒车辅助线设置方法及倒车辅助系统.pdf
本发明涉及车辆辅助控制领域,提供一种倒车辅助线设置方法及倒车辅助系统。本发明所述的倒车辅助线设置方法包括:根据方向盘转角和车身参数计算车辆倒车时车轮在大地平面的预计轨迹;当检测到所述车辆的后方存在障碍物时,确定所述障碍物的位置;以及根据所确定的障碍物的位置调整所述预计轨迹。本发明所述的倒车辅助线设置方法通过检测车辆的后方存在障碍物并确定所述障碍物的位置,从而跟据所确定的障碍物的位置调整预计轨迹,能够有效防止车辆倒车时按照轨迹线行驶而撞击障碍物。
一种挂车倒车辅助系统及控制方法.pdf
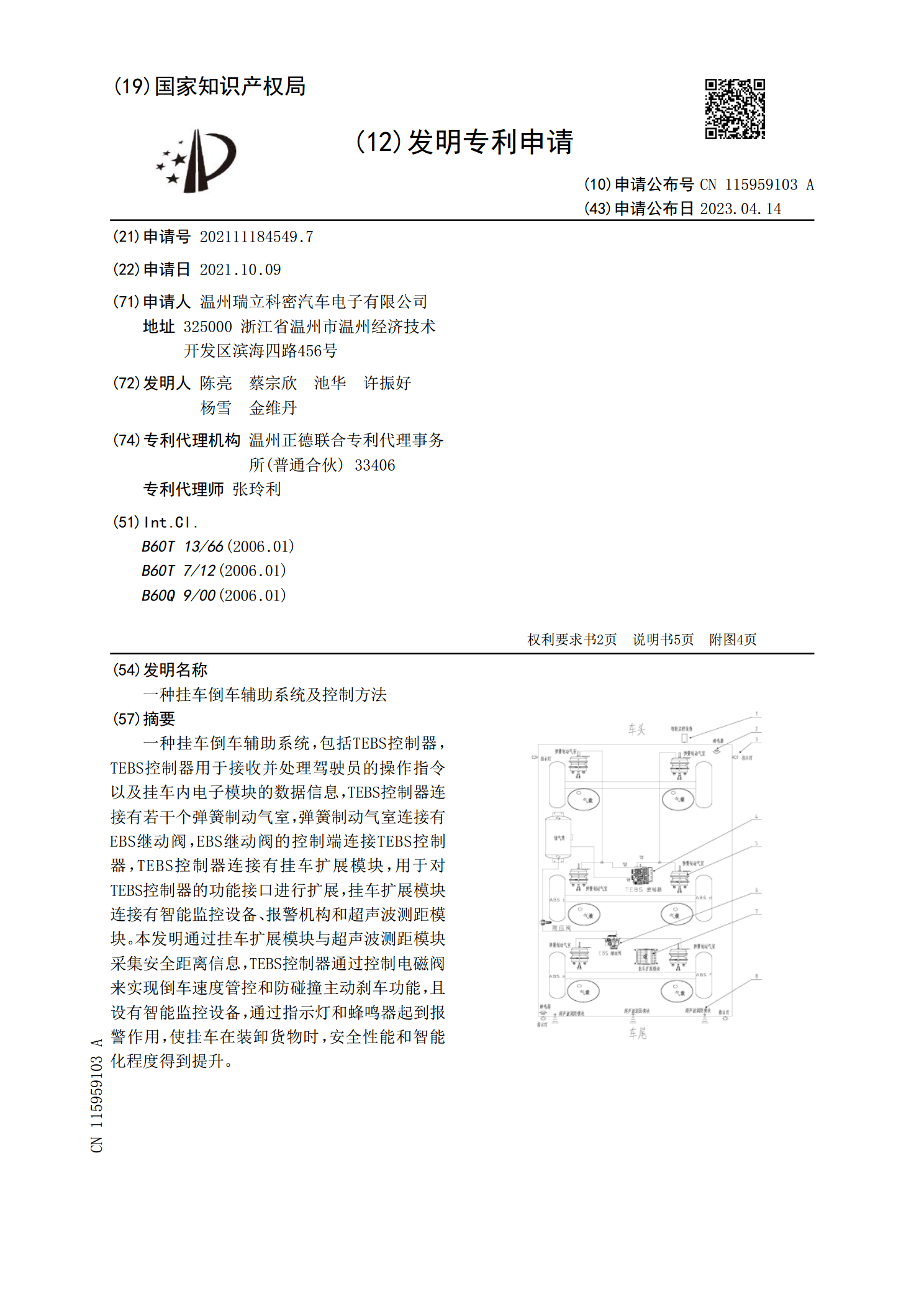
一种挂车倒车辅助系统,包括TEBS控制器,TEBS控制器用于接收并处理驾驶员的操作指令以及挂车内电子模块的数据信息,TEBS控制器连接有若干个弹簧制动气室,弹簧制动气室连接有EBS继动阀,EBS继动阀的控制端连接TEBS控制器,TEBS控制器连接有挂车扩展模块,用于对TEBS控制器的功能接口进行扩展,挂车扩展模块连接有智能监控设备、报警机构和超声波测距模块。本发明通过挂车扩展模块与超声波测距模块采集安全距离信息,TEBS控制器通过控制电磁阀来实现倒车速度管控和防碰撞主动刹车功能,且设有智能监控设备,通过指
倒车并线辅助系统及辅助方法.pdf
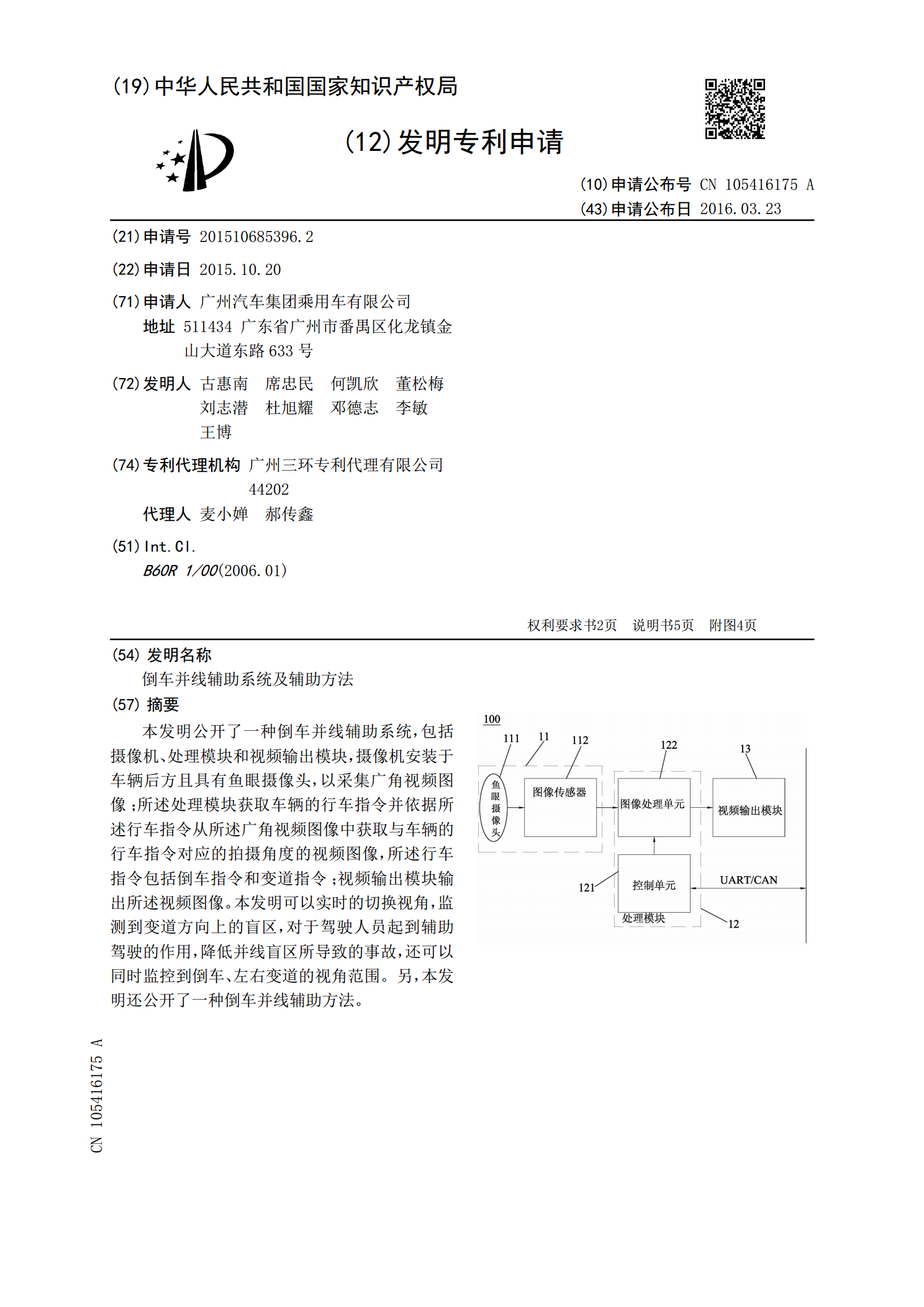
本发明公开了一种倒车并线辅助系统,包括摄像机、处理模块和视频输出模块,摄像机安装于车辆后方且具有鱼眼摄像头,以采集广角视频图像;所述处理模块获取车辆的行车指令并依据所述行车指令从所述广角视频图像中获取与车辆的行车指令对应的拍摄角度的视频图像,所述行车指令包括倒车指令和变道指令;视频输出模块输出所述视频图像。本发明可以实时的切换视角,监测到变道方向上的盲区,对于驾驶人员起到辅助驾驶的作用,降低并线盲区所导致的事故,还可以同时监控到倒车、左右变道的视角范围。另,本发明还公开了一种倒车并线辅助方法。