
一种基于剪枝快速随机搜索树算法的路径规划方法.pdf

甲申****66


1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于剪枝快速随机搜索树算法的路径规划方法.pdf
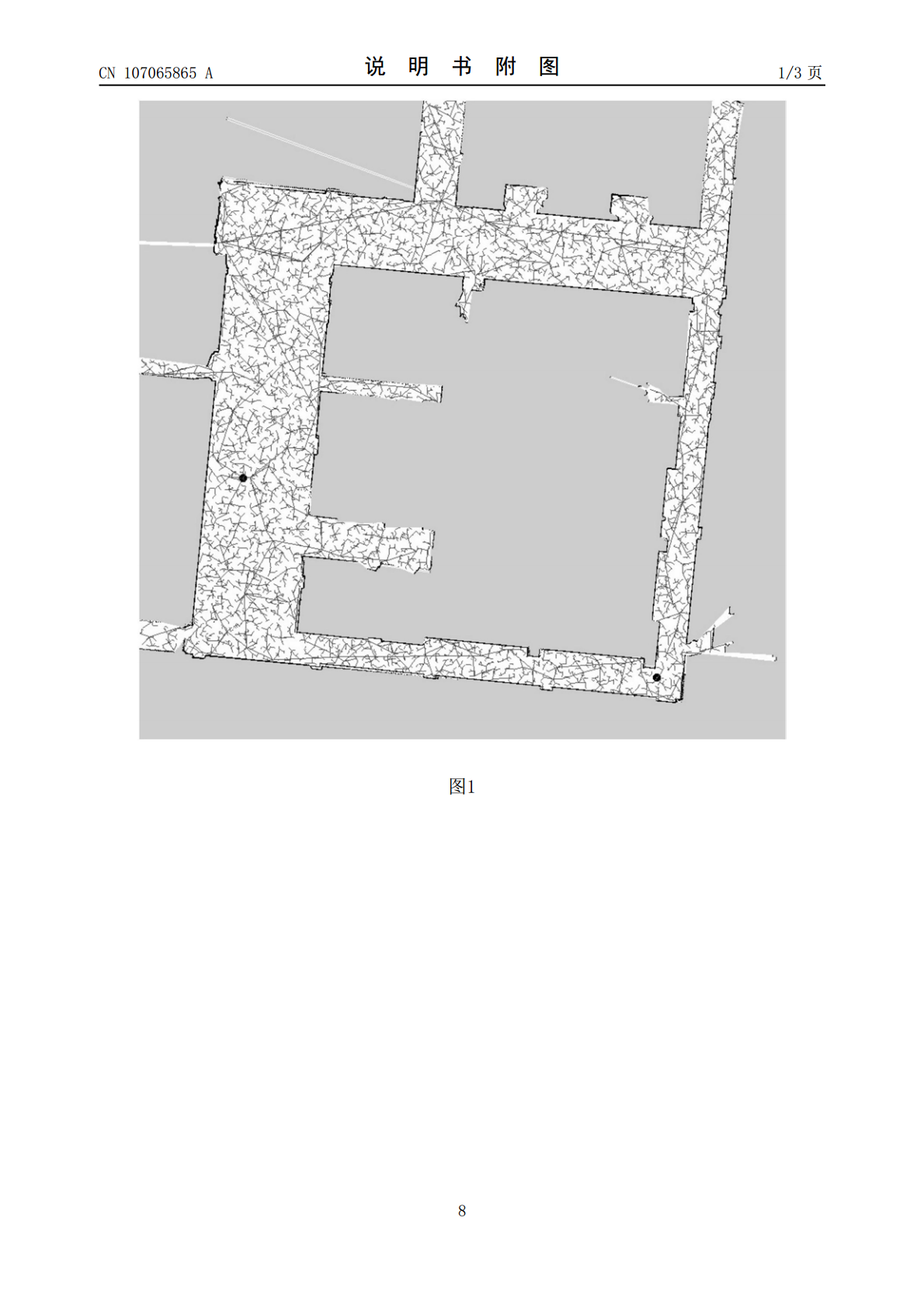
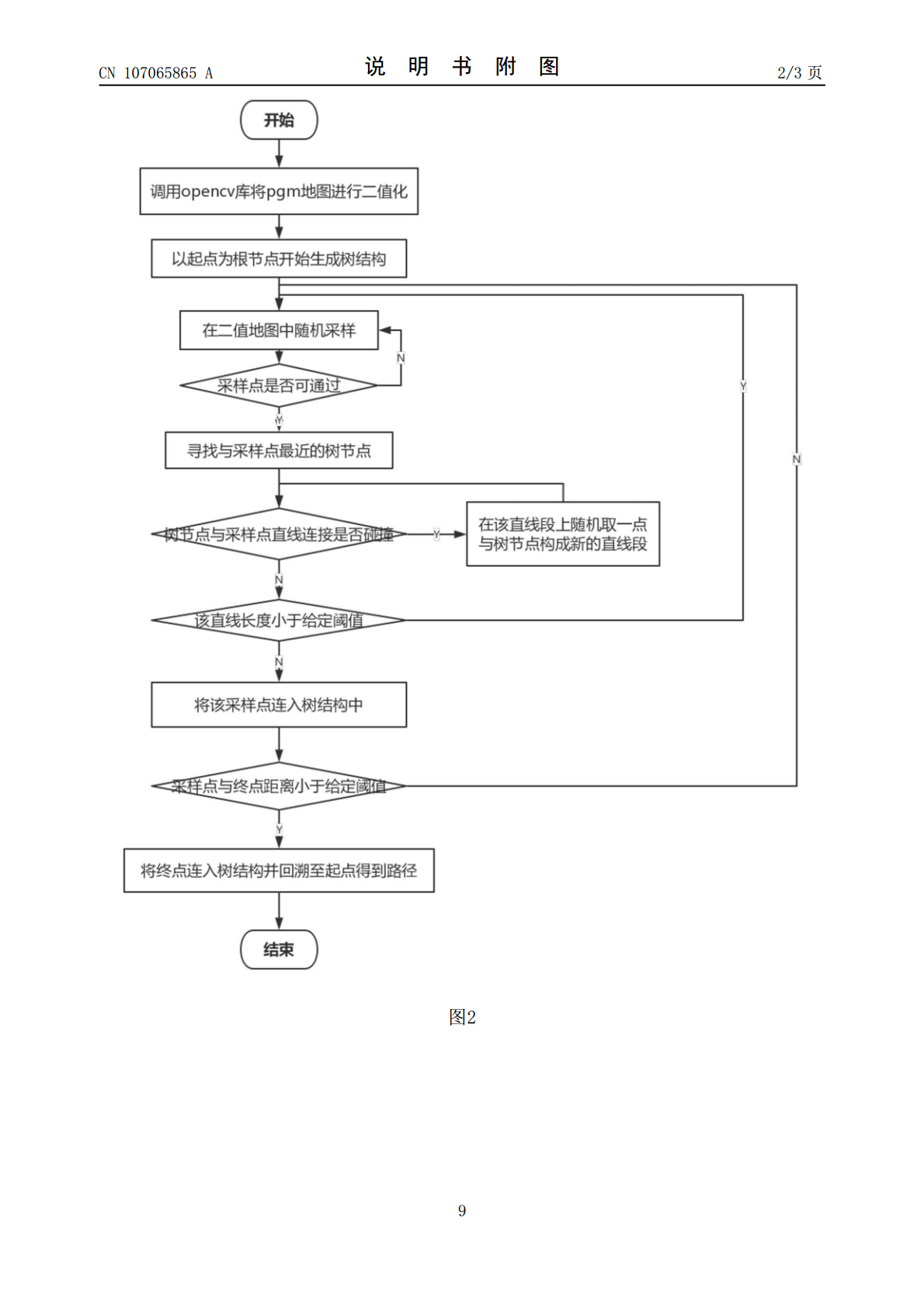
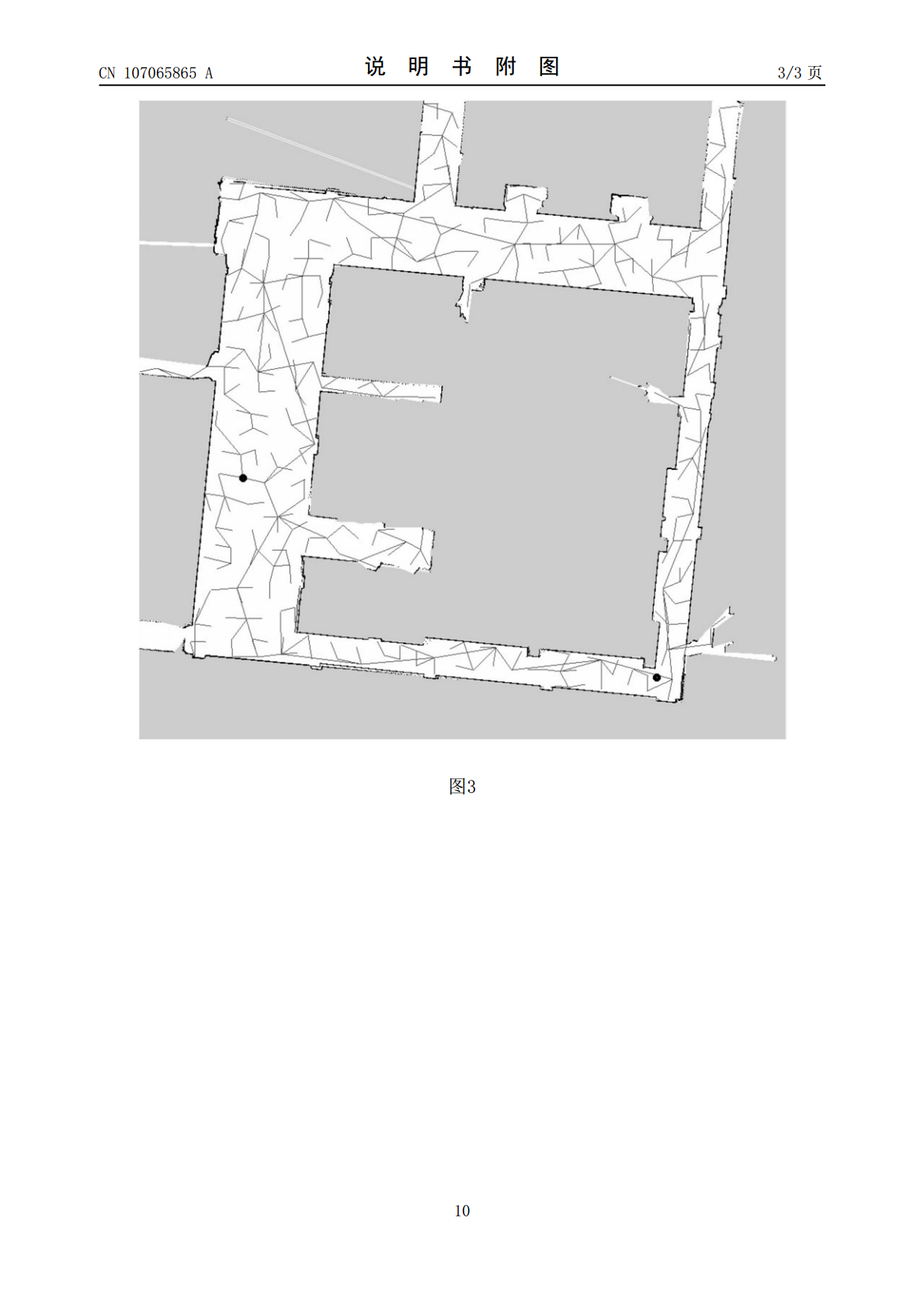
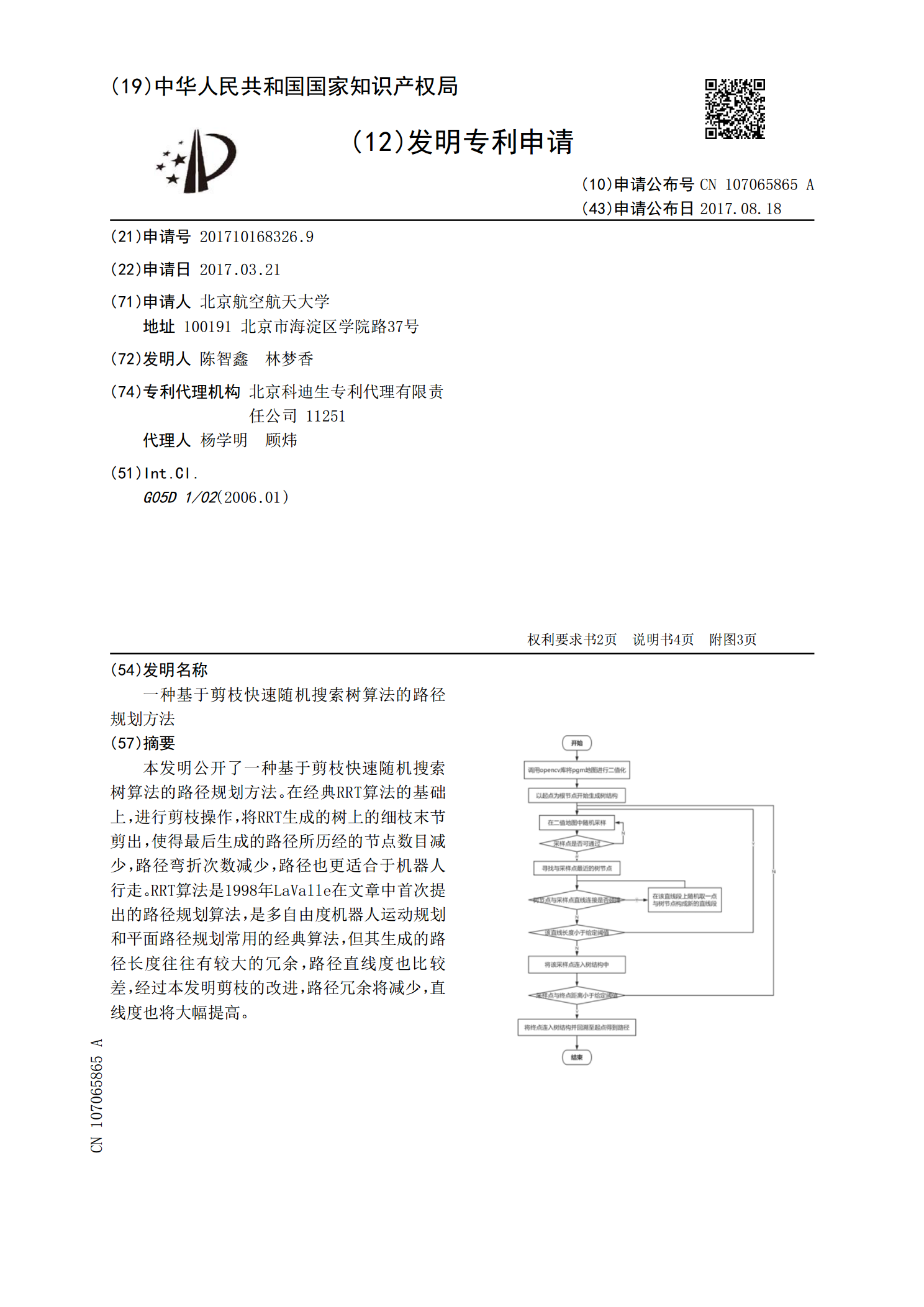
本发明公开了一种基于剪枝快速随机搜索树算法的路径规划方法。在经典RRT算法的基础上,进行剪枝操作,将RRT生成的树上的细枝末节剪出,使得最后生成的路径所历经的节点数目减少,路径弯折次数减少,路径也更适合于机器人行走。RRT算法是1998年LaValle在文章中首次提出的路径规划算法,是多自由度机器人运动规划和平面路径规划常用的经典算法,但其生成的路径长度往往有较大的冗余,路径直线度也比较差,经过本发明剪枝的改进,路径冗余将减少,直线度也将大幅提高。
一种基于自由空间与快速搜索随机树算法的无人车动态路径规划方法.pdf
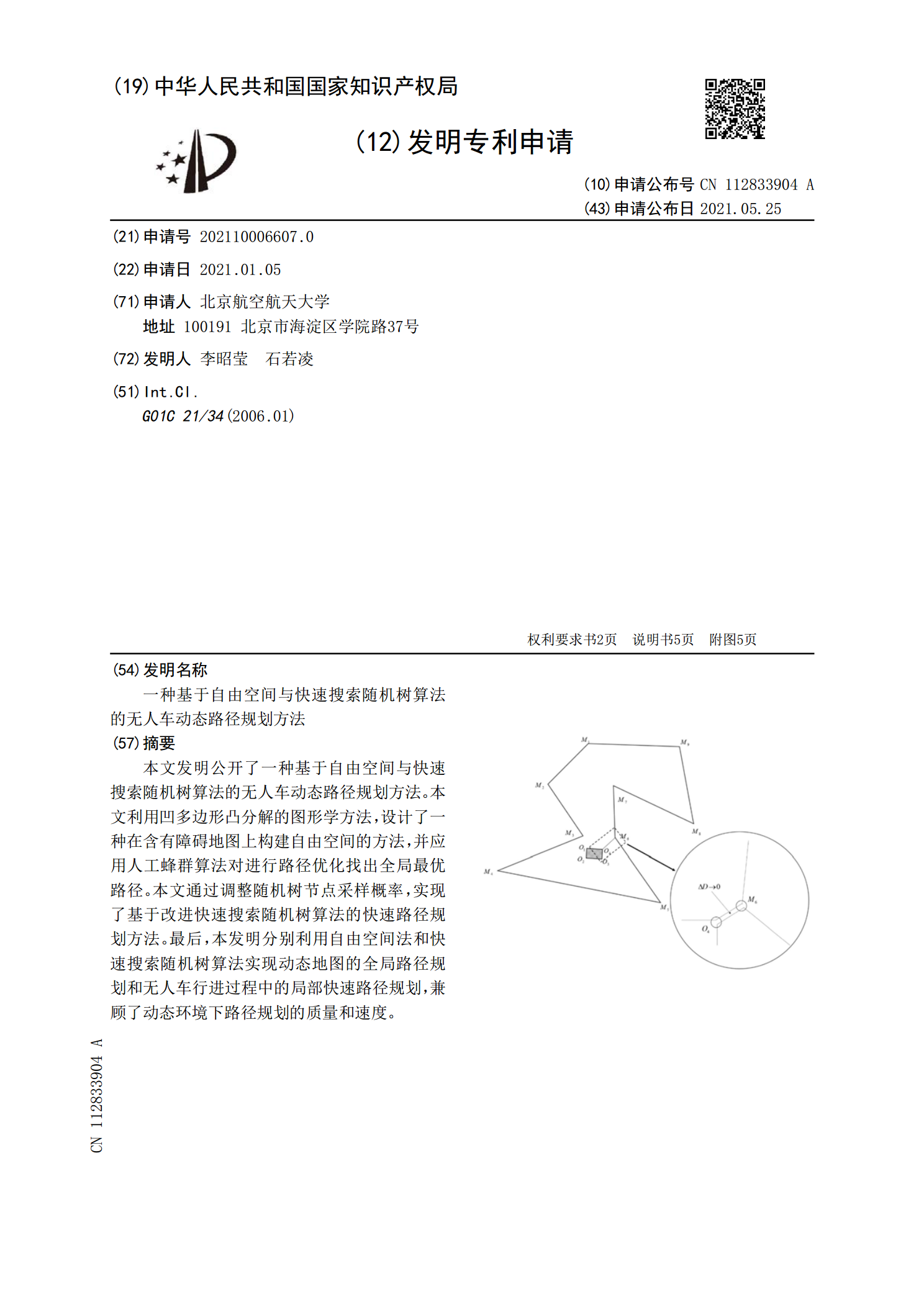
本文发明公开了一种基于自由空间与快速搜索随机树算法的无人车动态路径规划方法。本文利用凹多边形凸分解的图形学方法,设计了一种在含有障碍地图上构建自由空间的方法,并应用人工蜂群算法对进行路径优化找出全局最优路径。本文通过调整随机树节点采样概率,实现了基于改进快速搜索随机树算法的快速路径规划方法。最后,本发明分别利用自由空间法和快速搜索随机树算法实现动态地图的全局路径规划和无人车行进过程中的局部快速路径规划,兼顾了动态环境下路径规划的质量和速度。
一种基于AStar算法的路径搜索方法.pdf
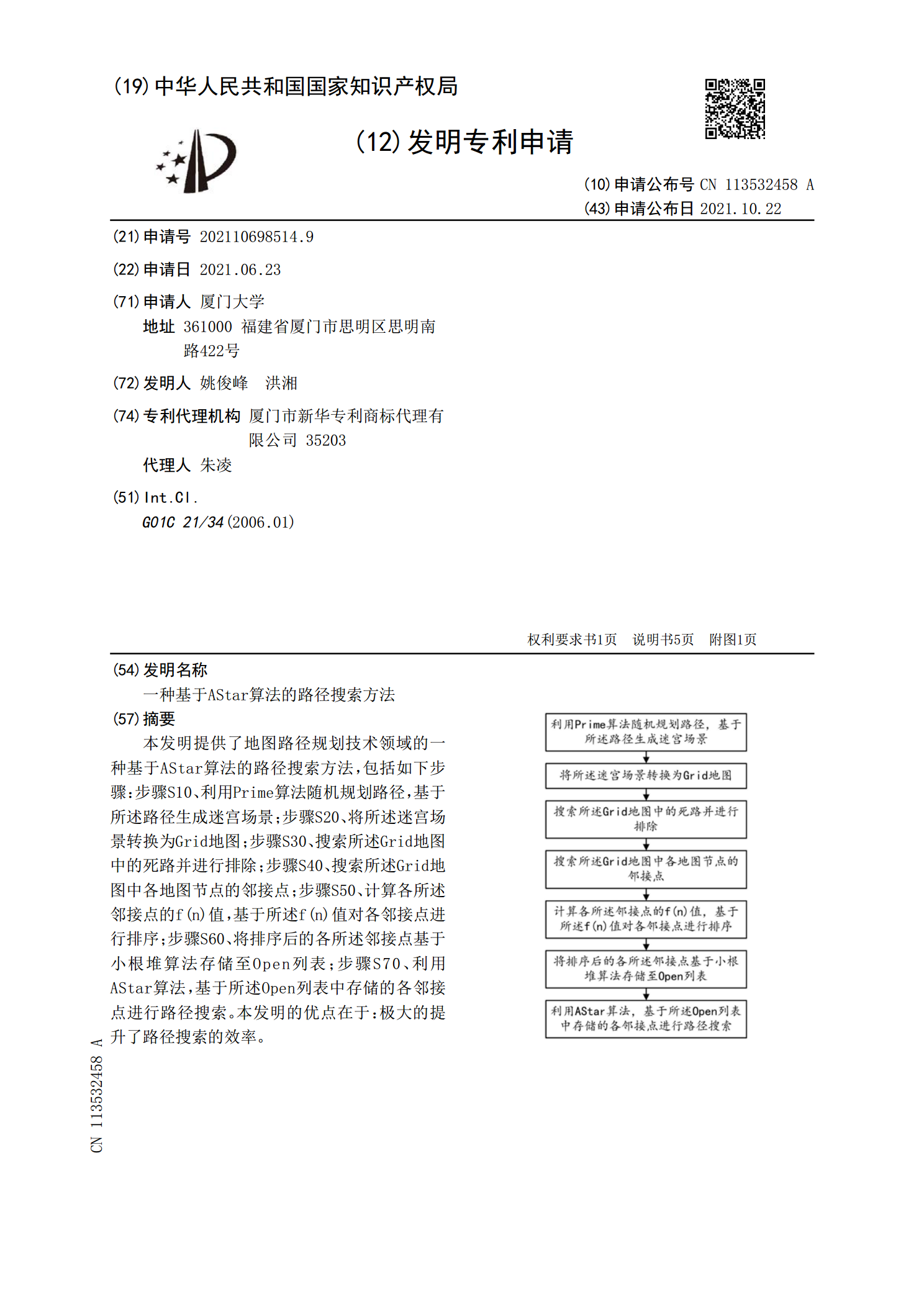
本发明提供了地图路径规划技术领域的一种基于AStar算法的路径搜索方法,包括如下步骤:步骤S10、利用Prime算法随机规划路径,基于所述路径生成迷宫场景;步骤S20、将所述迷宫场景转换为Grid地图;步骤S30、搜索所述Grid地图中的死路并进行排除;步骤S40、搜索所述Grid地图中各地图节点的邻接点;步骤S50、计算各所述邻接点的f(n)值,基于所述f(n)值对各邻接点进行排序;步骤S60、将排序后的各所述邻接点基于小根堆算法存储至Open列表;步骤S70、利用AStar算法,基于所述Open列表中

基于回环路网随机树的最优路径实时规划方法.pdf
一种基于回环路网随机树的最优路径实时规划方法,包括(1)回环路网预生成:①生成无环树;②在分支之间建立虚拟连接;③消除冗余和无效的虚拟连接;(2)实时优化迭代搜索:①建立起点和终点之间的不包含虚拟连接的路径;②遍历虚拟连接;③形成下一循环的迭代路径;④直到虚拟连接列表遍历完毕,此时的迭代路径即为算法优化搜索的结果,该路径通过松弛之后作为机器人运动的路径;(3)动态运行维护:①当障碍物发生变化时,修剪树分支,删除无效虚拟连接;②将修剪得到的多个子树进行重连接;③进行重生长过程,补充树节点和虚拟连接。本发明实

基于遗传算法的随机优化搜索.ppt
4.1基本概念2.染色体及其编码遗传算法以生物细胞中的染色体(chromosome)代表问题中的个体对象。而一个染色体可以看作是由若干基因组成的位串,所以需要将问题中的个体对象编码为某种位串的形式。这样,原个体对象也就相当于生命科学中所称的生物体的表现型(phenotype),而其编码即“染色体”也就相当于生物体的基因型(genotype)。遗传算法中染色体一般用字符串表示,而基因也就是字符串中的一个个字符。例如,假设数字9是某问题中的个体对象,则我们就可以用它的二进制数串1001作为它的染色体编码。3