
一种基于自由空间与快速搜索随机树算法的无人车动态路径规划方法.pdf

梦影****主a


1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于自由空间与快速搜索随机树算法的无人车动态路径规划方法.pdf
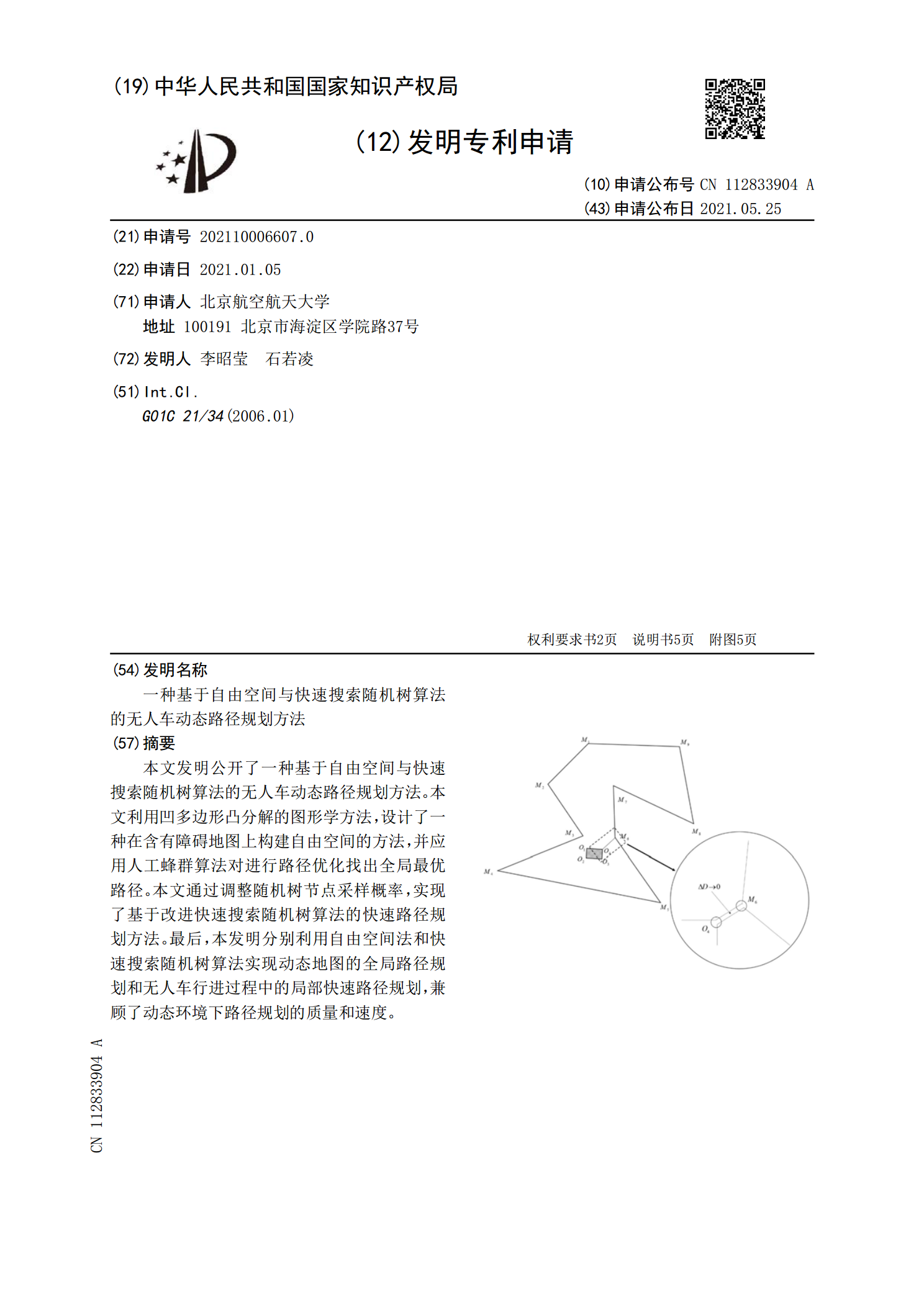
本文发明公开了一种基于自由空间与快速搜索随机树算法的无人车动态路径规划方法。本文利用凹多边形凸分解的图形学方法,设计了一种在含有障碍地图上构建自由空间的方法,并应用人工蜂群算法对进行路径优化找出全局最优路径。本文通过调整随机树节点采样概率,实现了基于改进快速搜索随机树算法的快速路径规划方法。最后,本发明分别利用自由空间法和快速搜索随机树算法实现动态地图的全局路径规划和无人车行进过程中的局部快速路径规划,兼顾了动态环境下路径规划的质量和速度。
一种基于剪枝快速随机搜索树算法的路径规划方法.pdf
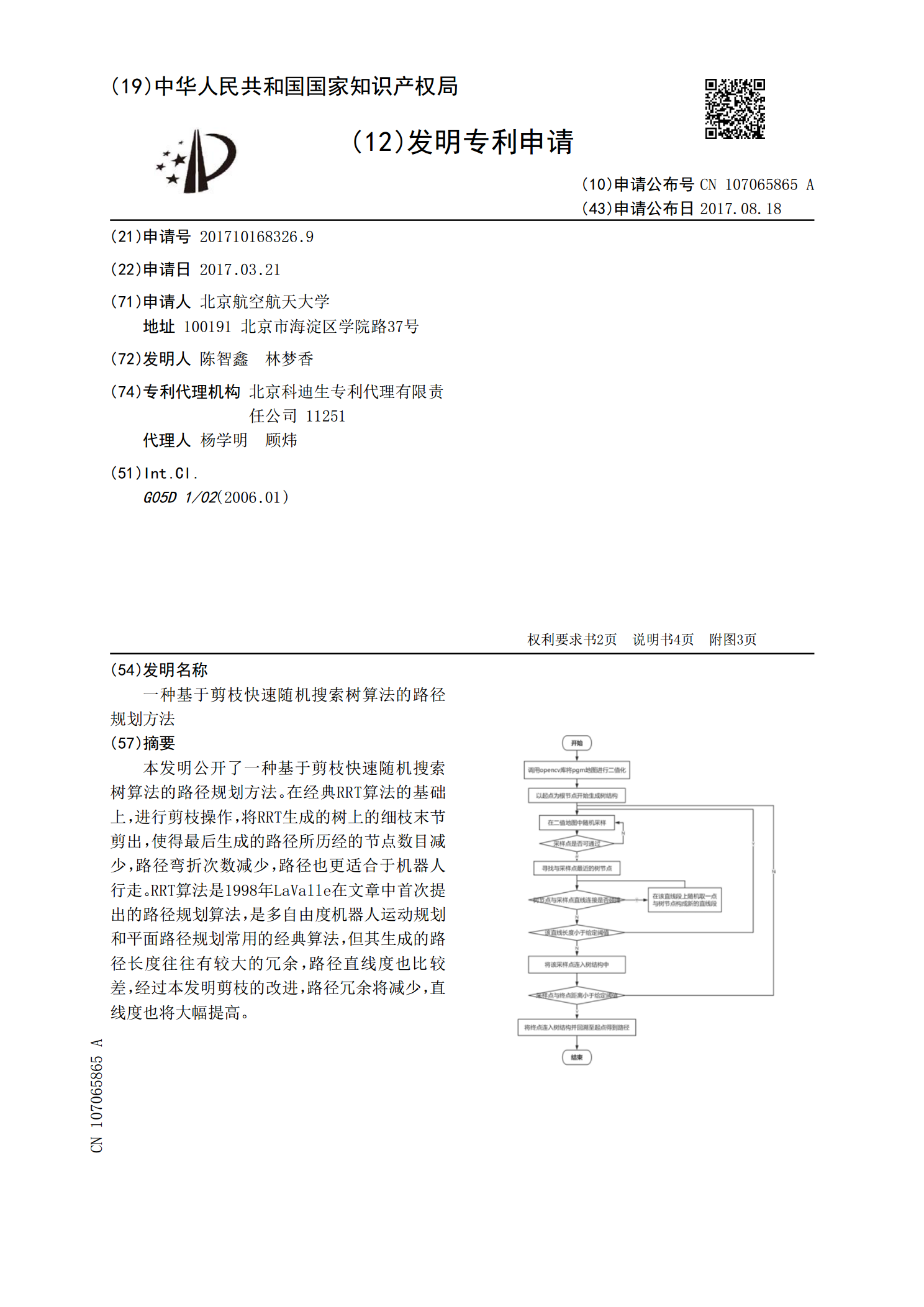
本发明公开了一种基于剪枝快速随机搜索树算法的路径规划方法。在经典RRT算法的基础上,进行剪枝操作,将RRT生成的树上的细枝末节剪出,使得最后生成的路径所历经的节点数目减少,路径弯折次数减少,路径也更适合于机器人行走。RRT算法是1998年LaValle在文章中首次提出的路径规划算法,是多自由度机器人运动规划和平面路径规划常用的经典算法,但其生成的路径长度往往有较大的冗余,路径直线度也比较差,经过本发明剪枝的改进,路径冗余将减少,直线度也将大幅提高。

基于势场搜索的无人车动态避障路径规划算法研究.pptx
基于势场搜索的无人车动态避障路径规划算法研究目录势场搜索算法原理势场搜索算法概述势场搜索算法的基本原理势场搜索算法的优势无人车动态避障路径规划算法研究无人车动态避障路径规划算法概述无人车动态避障路径规划算法的实现无人车动态避障路径规划算法的优化基于势场搜索的无人车动态避障路径规划算法基于势场搜索的无人车动态避障路径规划算法概述基于势场搜索的无人车动态避障路径规划算法的实现基于势场搜索的无人车动态避障路径规划算法的优化实验验证与结果分析实验环境与实验设置实验结果与分析实验结论与讨论总结与展望研究总结研究展望

基于多优化快速扩展随机树算法的足球机器人路径规划.docx
基于多优化快速扩展随机树算法的足球机器人路径规划基于多优化快速扩展随机树算法的足球机器人路径规划摘要:路径规划是足球机器人技术中的关键问题之一,它涉及到机器人在复杂环境中高效移动以实现任务目标。本论文提出了一种基于多优化快速扩展随机树算法的足球机器人路径规划方法。该方法通过增加核心路径规划算法的多优化和快速扩展随机树算法两个模块,提高了机器人路径规划的速度和准确性。实验结果表明,所提出的方法能够有效地规划出机器人的最优路径。关键词:路径规划,足球机器人,多优化,快速扩展随机树1.引言足球机器人在复杂的比赛

基于快速扩展随机树的机械臂路径优化算法研究.pptx
,目录PartOnePartTwo算法定义算法原理算法应用场景算法优缺点PartThree算法原理算法实现过程算法参数设置算法改进方向PartFour路径优化问题定义路径优化问题求解方法机械臂路径优化问题特点机械臂路径优化问题应用场景PartFive算法流程设计算法实现细节算法实验验证算法性能评估PartSix算法应用实例算法改进方向未来研究展望THANKS