
基于回环路网随机树的最优路径实时规划方法.pdf

莉娜****ua

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于回环路网随机树的最优路径实时规划方法.pdf
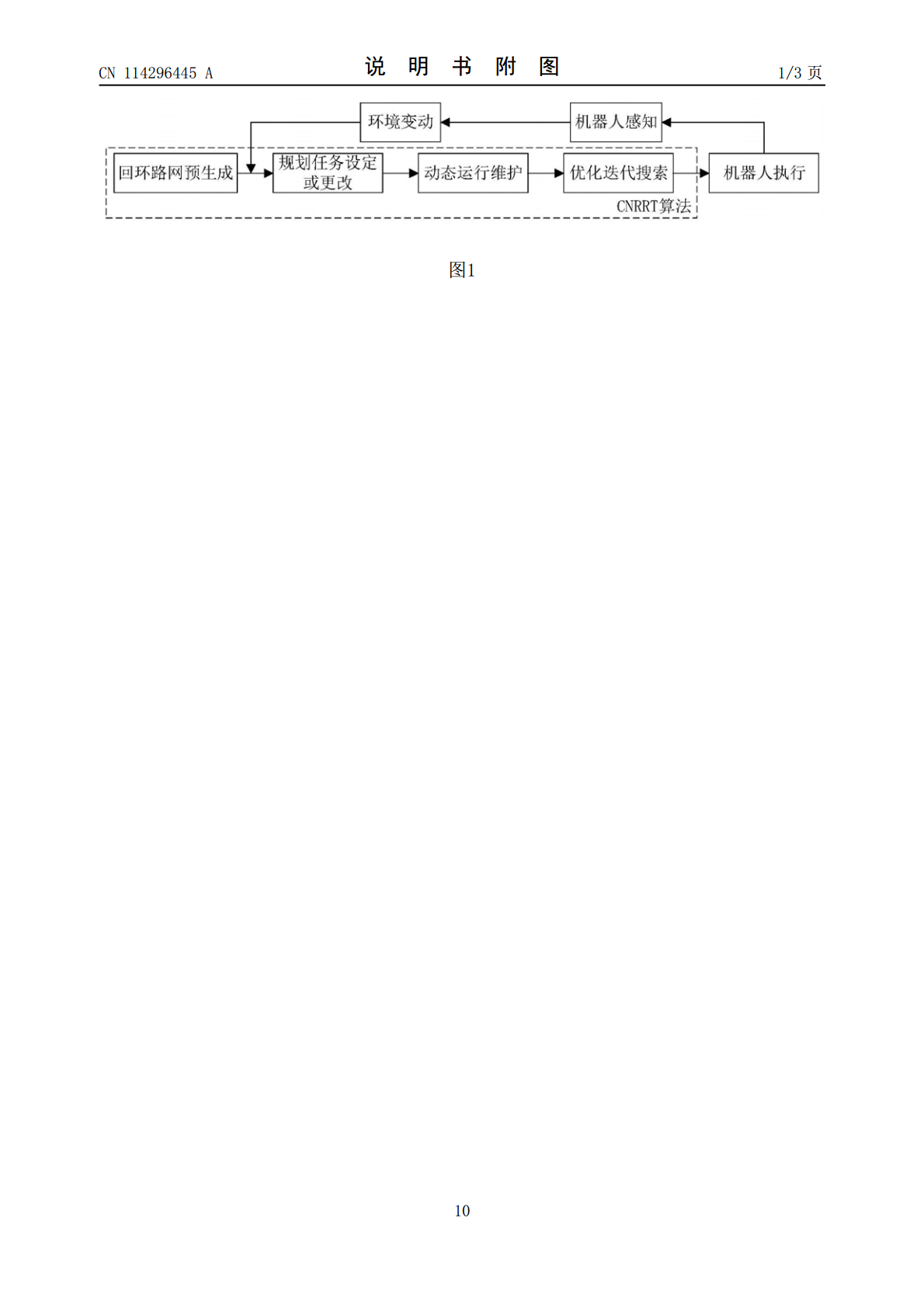
一种基于回环路网随机树的最优路径实时规划方法,包括(1)回环路网预生成:①生成无环树;②在分支之间建立虚拟连接;③消除冗余和无效的虚拟连接;(2)实时优化迭代搜索:①建立起点和终点之间的不包含虚拟连接的路径;②遍历虚拟连接;③形成下一循环的迭代路径;④直到虚拟连接列表遍历完毕,此时的迭代路径即为算法优化搜索的结果,该路径通过松弛之后作为机器人运动的路径;(3)动态运行维护:①当障碍物发生变化时,修剪树分支,删除无效虚拟连接;②将修剪得到的多个子树进行重连接;③进行重生长过程,补充树节点和虚拟连接。本发明实
基于时空路网模型的最优路径规划的处理方法及系统.pdf
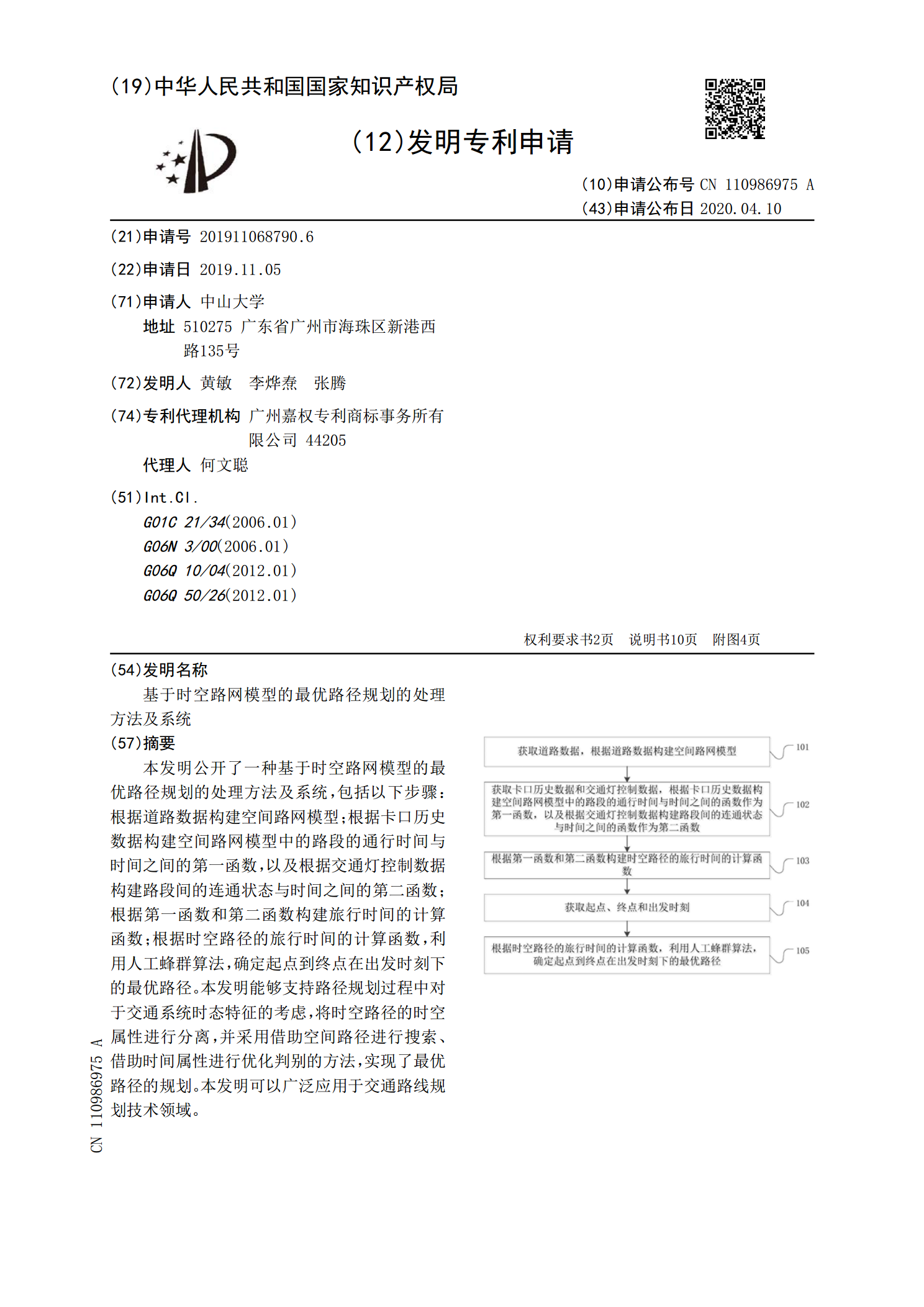
本发明公开了一种基于时空路网模型的最优路径规划的处理方法及系统,包括以下步骤:根据道路数据构建空间路网模型;根据卡口历史数据构建空间路网模型中的路段的通行时间与时间之间的第一函数,以及根据交通灯控制数据构建路段间的连通状态与时间之间的第二函数;根据第一函数和第二函数构建旅行时间的计算函数;根据时空路径的旅行时间的计算函数,利用人工蜂群算法,确定起点到终点在出发时刻下的最优路径。本发明能够支持路径规划过程中对于交通系统时态特征的考虑,将时空路径的时空属性进行分离,并采用借助空间路径进行搜索、借助时间属性进行
基于最优控制及宽度学习的AGV实时路径规划方法.pdf
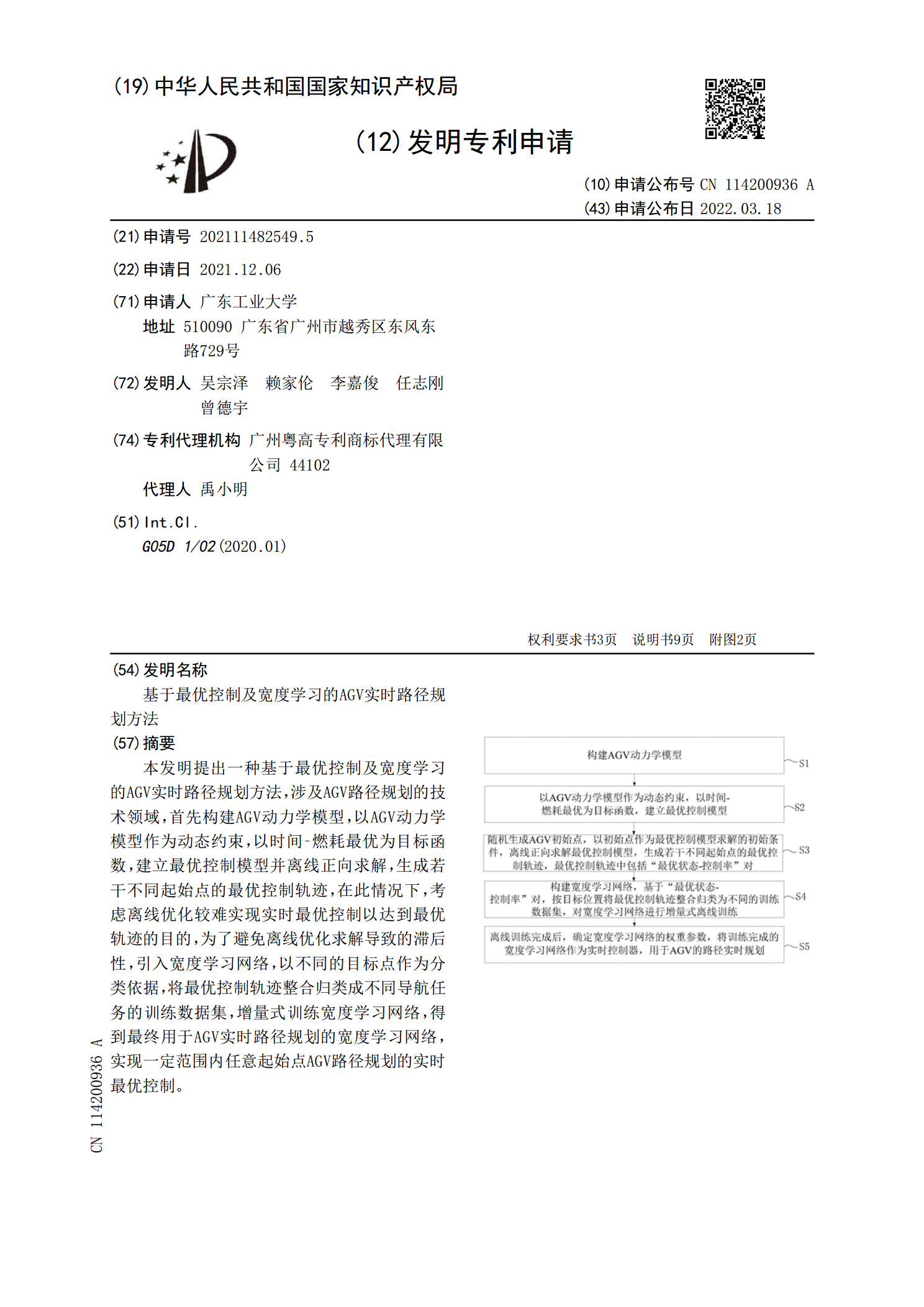
本发明提出一种基于最优控制及宽度学习的AGV实时路径规划方法,涉及AGV路径规划的技术领域,首先构建AGV动力学模型,以AGV动力学模型作为动态约束,以时间‑燃耗最优为目标函数,建立最优控制模型并离线正向求解,生成若干不同起始点的最优控制轨迹,在此情况下,考虑离线优化较难实现实时最优控制以达到最优轨迹的目的,为了避免离线优化求解导致的滞后性,引入宽度学习网络,以不同的目标点作为分类依据,将最优控制轨迹整合归类成不同导航任务的训练数据集,增量式训练宽度学习网络,得到最终用于AGV实时路径规划的宽度学习网络,

基于随机方法的纳米操作机器人实时定位与路径规划研究.docx
基于随机方法的纳米操作机器人实时定位与路径规划研究基于随机方法的纳米操作机器人实时定位与路径规划研究摘要:随着纳米技术的发展,纳米操作机器人在医学、生化、电子等领域的应用越来越广泛。然而,纳米操作机器人的实时定位和路径规划仍然是一个挑战,因为它受到纳米尺度下不确定性和复杂环境的影响。本文提出了一种基于随机方法的纳米操作机器人实时定位与路径规划方法,该方法能够有效地解决实时定位和路径规划问题。关键词:纳米操作机器人;实时定位;路径规划;随机方法1.引言纳米技术的兴起使得纳米操作机器人成为现实,这些纳米操作机
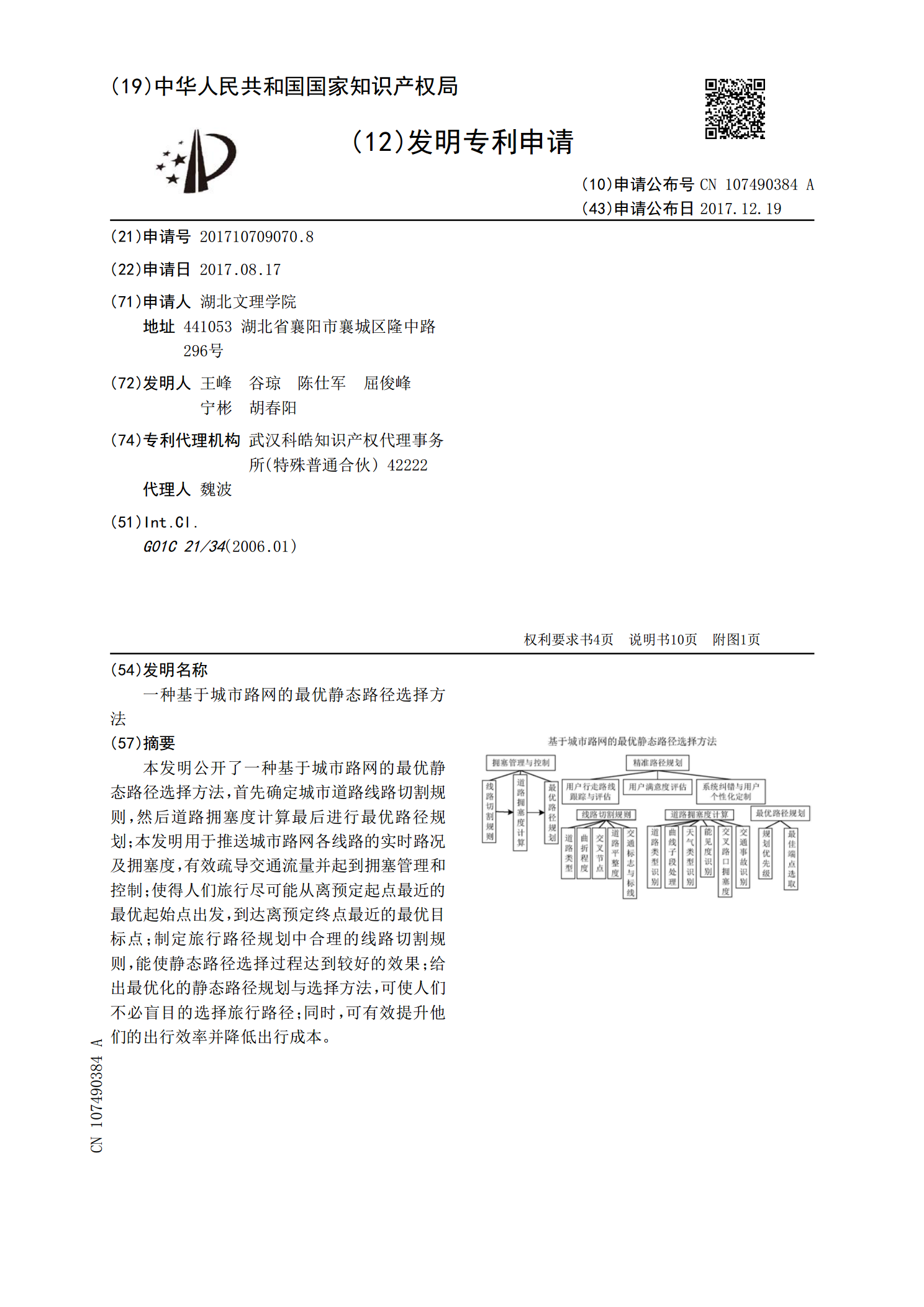
一种基于城市路网的最优静态路径选择方法.pdf
本发明公开了一种基于城市路网的最优静态路径选择方法,首先确定城市道路线路切割规则,然后道路拥塞度计算最后进行最优路径规划;本发明用于推送城市路网各线路的实时路况及拥塞度,有效疏导交通流量并起到拥塞管理和控制;使得人们旅行尽可能从离预定起点最近的最优起始点出发,到达离预定终点最近的最优目标点;制定旅行路径规划中合理的线路切割规则,能使静态路径选择过程达到较好的效果;给出最优化的静态路径规划与选择方法,可使人们不必盲目的选择旅行路径;同时,可有效提升他们的出行效率并降低出行成本。