
一种车载雷达在环实时仿真测试系统及其方法.pdf

邻家****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车载雷达在环实时仿真测试系统及其方法.pdf
本发明公开了一种车载雷达在环实时仿真测试系统及其方法,包括:处于转台上的被测雷达、驾驶操作单元、显示器、实时控制器和上位机;驾驶操作单元包括:驾驶操作机构和驾驶操作信号传感器;上位机包括:虚拟试验场和目标测试分析单元;虚拟试验场中包含:驾驶车辆模型和目标车辆模型;驾驶车辆模型用于虚拟装载被测雷达;实时控制器包括:频谱测量单元、目标仿真单元、运动控制器和数据采集卡;频谱测量单元包括:毫米波信号收发器、毫米波降频器、毫米波信号分析仪、延时控制器、毫米波信号发生器、毫米波升频器。本发明能通过雷达硬件在环实时仿真

一种雷达信号环境实时仿真方法.pptx
汇报人:CONTENTSPARTONEPARTTWO雷达信号环境仿真的重要性实时仿真的需求和挑战仿真方法的原理和流程PARTTHREE雷达信号传播特性目标与杂波模型信号处理算法模型仿真场景的构建与参数设置PARTFOUR硬件平台的选型与搭建软件算法的优化与实现数据采集与处理实时性能的评估与优化PARTFIVE仿真结果的可视化展示性能评估与对比分析在雷达系统设计中的应用在雷达训练与作战模拟中的应用PARTSIX相对于传统仿真方法的优势存在的局限性未来发展的方向与展望汇报人:

一种车载雷达测试装置及其控制方法.pdf
本发明公开了一种车载雷达测试装置,包括:电机,其具有可伸缩转动的输出轴;连接杆,其一端设置在所述输出轴末端,所述连接杆与所述输出轴垂直固定;车载雷达,其安装在所述连接杆另一端;风速传感器,其设置在自车车尾,用于检测风速;车速传感器,其设置在所述自车的轮毂上,用于检测自车车速;控制器,其连接所述电机、所述车载雷达、所述风速传感器、所述车速传感器,控制所述电机。本发明提供了一种车载雷达测试装置,能够实时监控车载雷达的工作状态,并调整车载雷达的位置。本发明还提供了一种车载雷达测试装置的控制方法,能够基于BP神经

一种车载道路坡度实时测试系统及测试方法.pdf
本发明公开了一种车载道路坡度实时测试系统及测试方法,测试系统由GPS测试设备、固定装置及数据采集与处理板卡构成;GPS测试设备主要用于精确获取汽车测点处的水平速度和垂直速度;固定装置用于固定GPS接收机天线位于汽车后轮的上方;数据采集与处理板卡用于实时解算出道路坡度并且通过CAN输出。测试方法方面,数据采集与处理板卡对滤波后的速度信息进行计算,处理速度快,实时性好。本发明所采用的测试系统及其测试方法安装简单,操作方便,精度较高。
一种车载多功能相控阵雷达智能探测系统及其方法.pdf
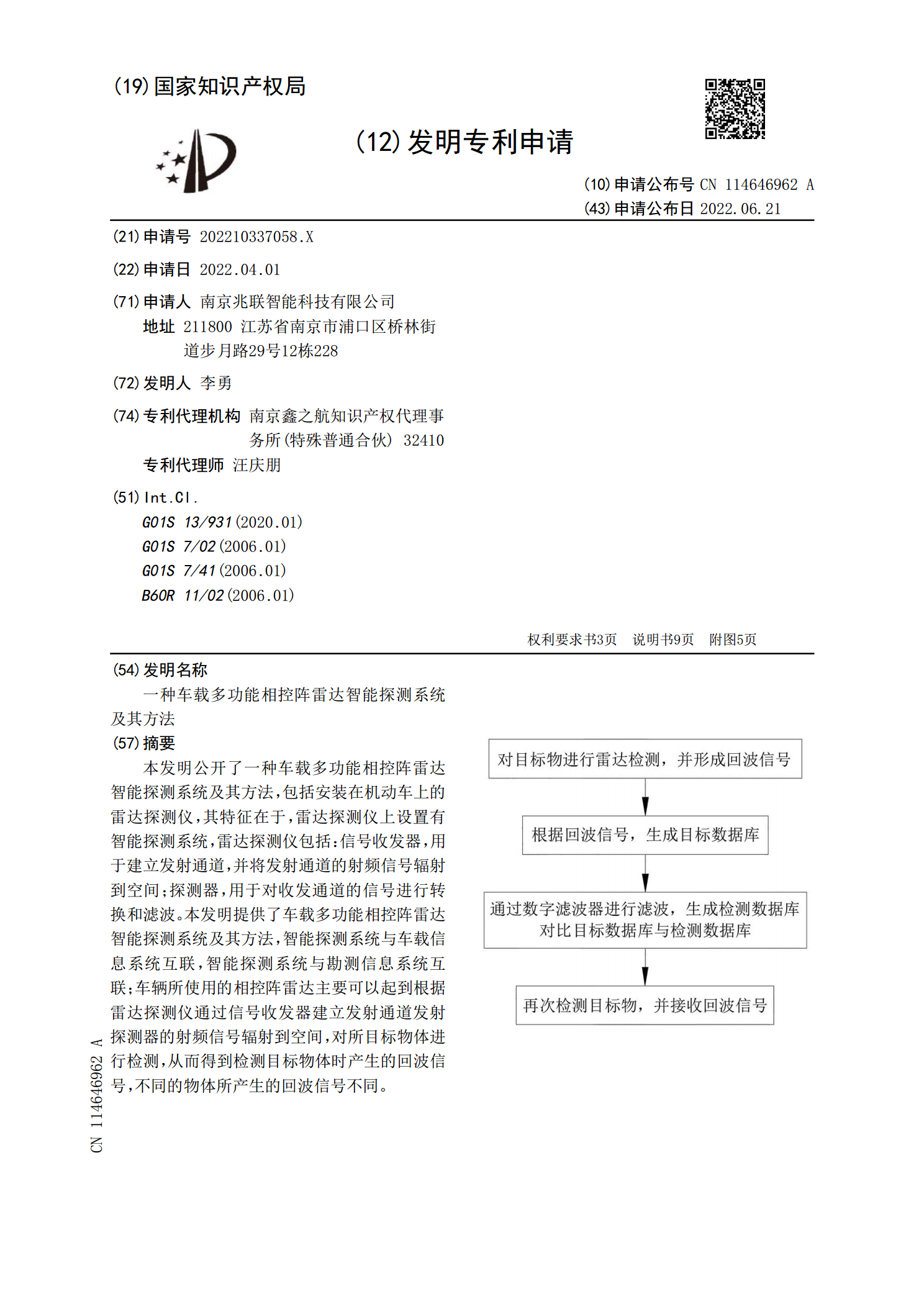
本发明公开了一种车载多功能相控阵雷达智能探测系统及其方法,包括安装在机动车上的雷达探测仪,其特征在于,雷达探测仪上设置有智能探测系统,雷达探测仪包括:信号收发器,用于建立发射通道,并将发射通道的射频信号辐射到空间;探测器,用于对收发通道的信号进行转换和滤波。本发明提供了车载多功能相控阵雷达智能探测系统及其方法,智能探测系统与车载信息系统互联,智能探测系统与勘测信息系统互联;车辆所使用的相控阵雷达主要可以起到根据雷达探测仪通过信号收发器建立发射通道发射探测器的射频信号辐射到空间,对所目标物体进行检测,从而得