
一种玻璃幕墙清洗机器人的爬壁机构及其工作方法.pdf

是你****松呀


1/9

2/9
3/9

4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种玻璃幕墙清洗机器人的爬壁机构及其工作方法.pdf
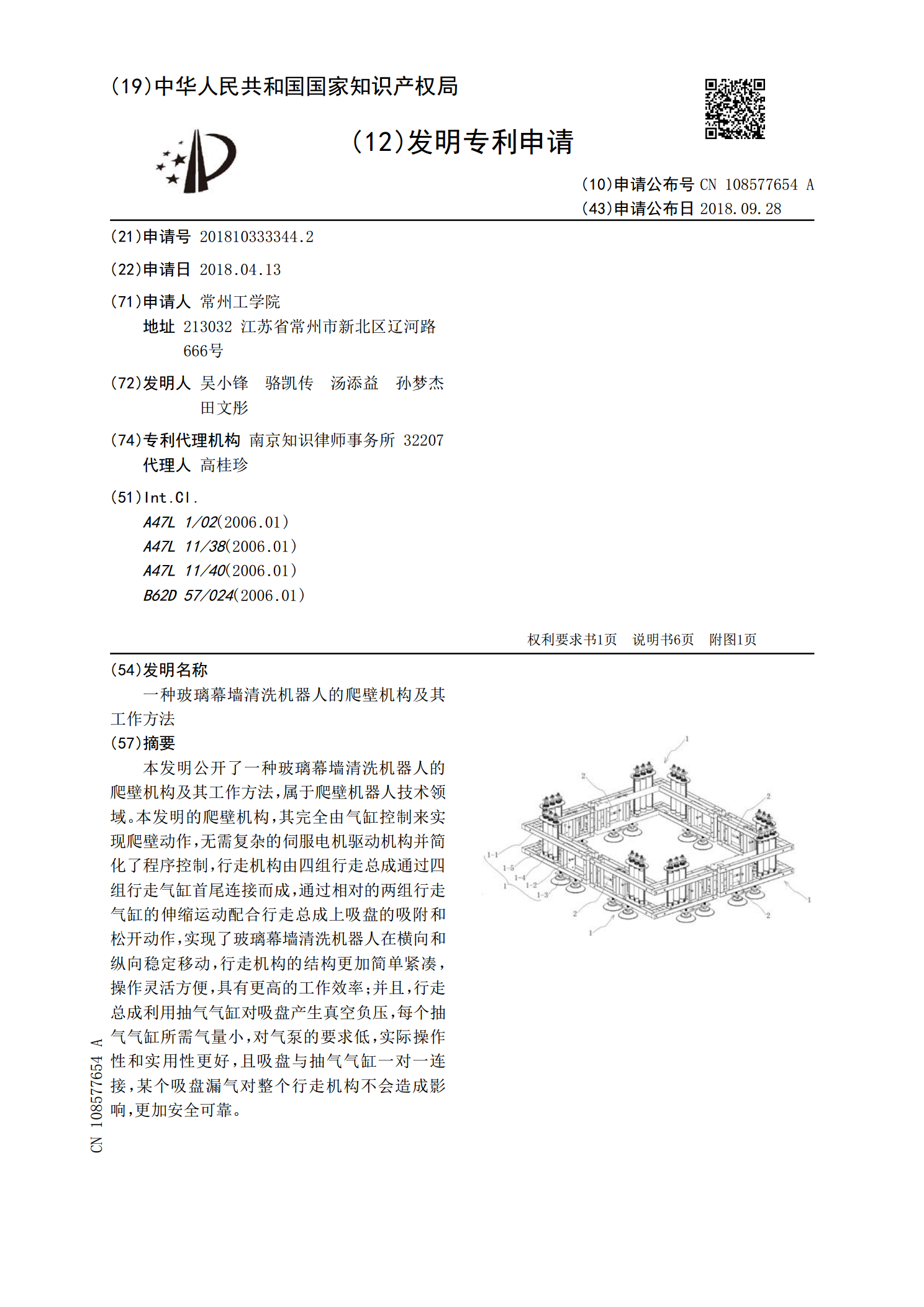
本发明公开了一种玻璃幕墙清洗机器人的爬壁机构及其工作方法,属于爬壁机器人技术领域。本发明的爬壁机构,其完全由气缸控制来实现爬壁动作,无需复杂的伺服电机驱动机构并简化了程序控制,行走机构由四组行走总成通过四组行走气缸首尾连接而成,通过相对的两组行走气缸的伸缩运动配合行走总成上吸盘的吸附和松开动作,实现了玻璃幕墙清洗机器人在横向和纵向稳定移动,行走机构的结构更加简单紧凑,操作灵活方便,具有更高的工作效率;并且,行走总成利用抽气气缸对吸盘产生真空负压,每个抽气气缸所需气量小,对气泵的要求低,实际操作性和实用性更
一种爬壁式机器人及其工作方法.pdf
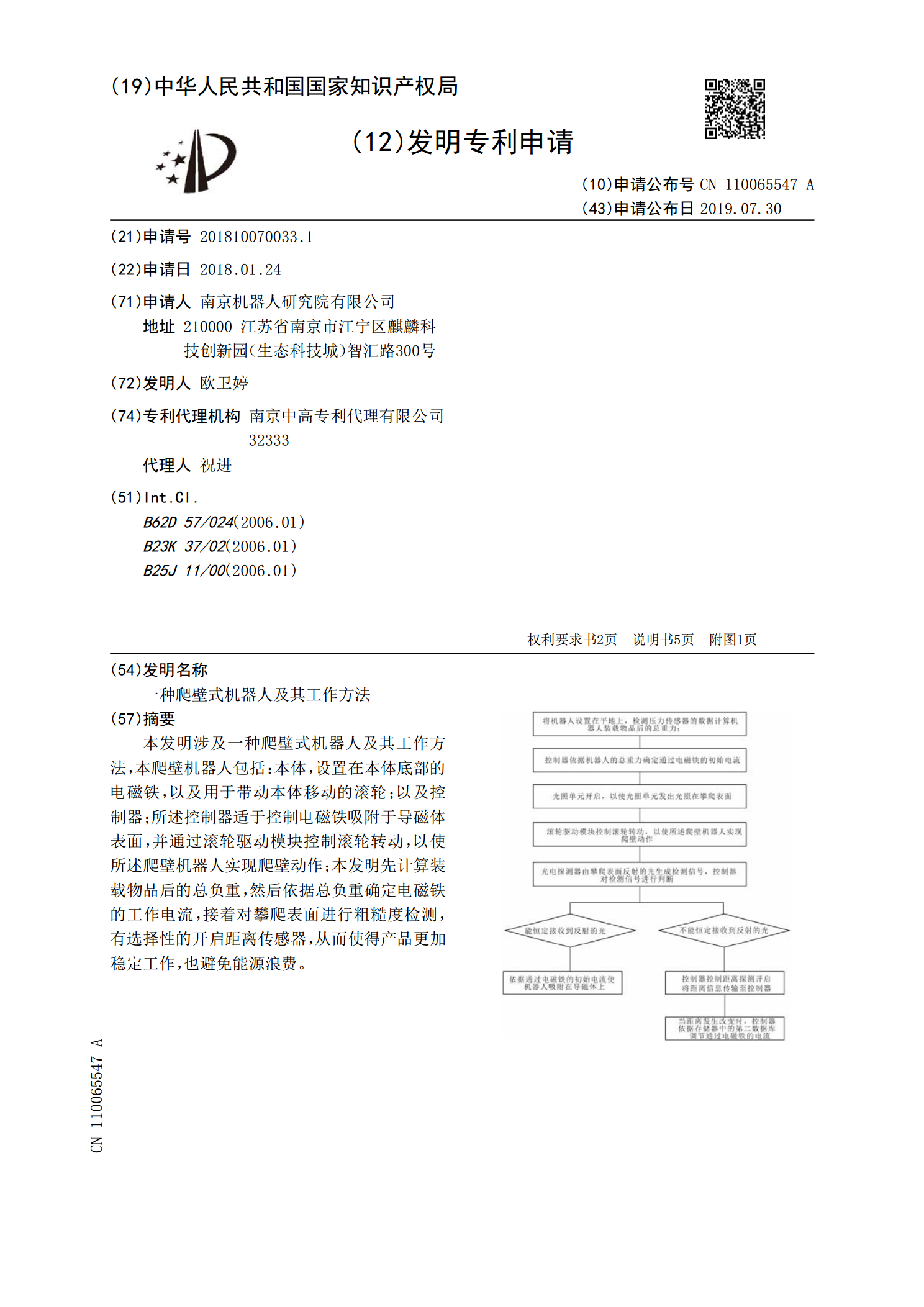
本发明涉及一种爬壁式机器人及其工作方法,本爬壁机器人包括:本体,设置在本体底部的电磁铁,以及用于带动本体移动的滚轮;以及控制器;所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作;本发明先计算装载物品后的总负重,然后依据总负重确定电磁铁的工作电流,接着对攀爬表面进行粗糙度检测,有选择性的开启距离传感器,从而使得产品更加稳定工作,也避免能源浪费。
轮式爬壁机器人及其工作方法.pdf
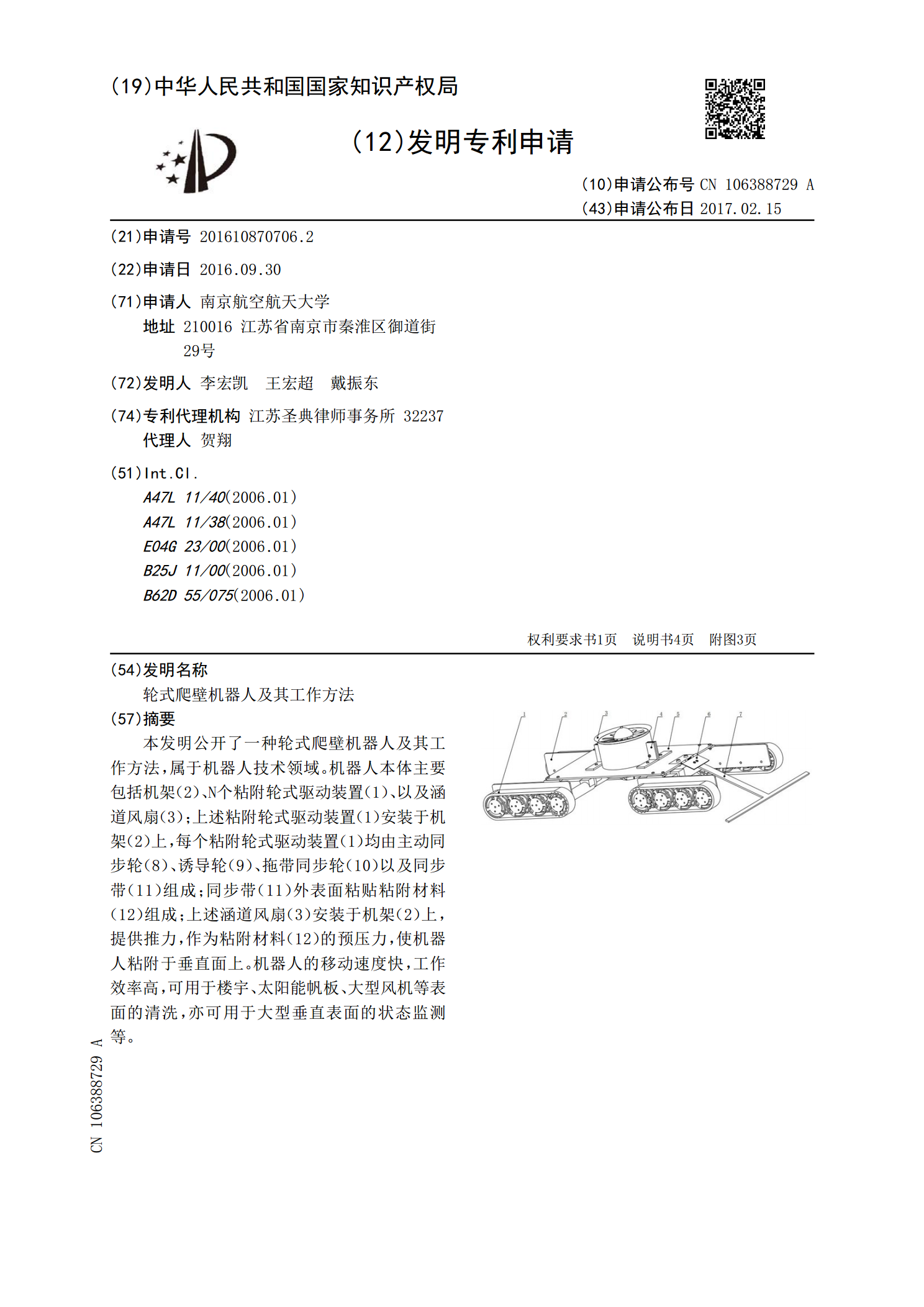
本发明公开了一种轮式爬壁机器人及其工作方法,属于机器人技术领域。机器人本体主要包括机架(2)、N个粘附轮式驱动装置(1)、以及涵道风扇(3);上述粘附轮式驱动装置(1)安装于机架(2)上,每个粘附轮式驱动装置(1)均由主动同步轮(8)、诱导轮(9)、拖带同步轮(10)以及同步带(11)组成;同步带(11)外表面粘贴粘附材料(12)组成;上述涵道风扇(3)安装于机架(2)上,提供推力,作为粘附材料(12)的预压力,使机器人粘附于垂直面上。机器人的移动速度快,工作效率高,可用于楼宇、太阳能帆板、大型风机等表面
船体清洗爬壁机器人.pdf
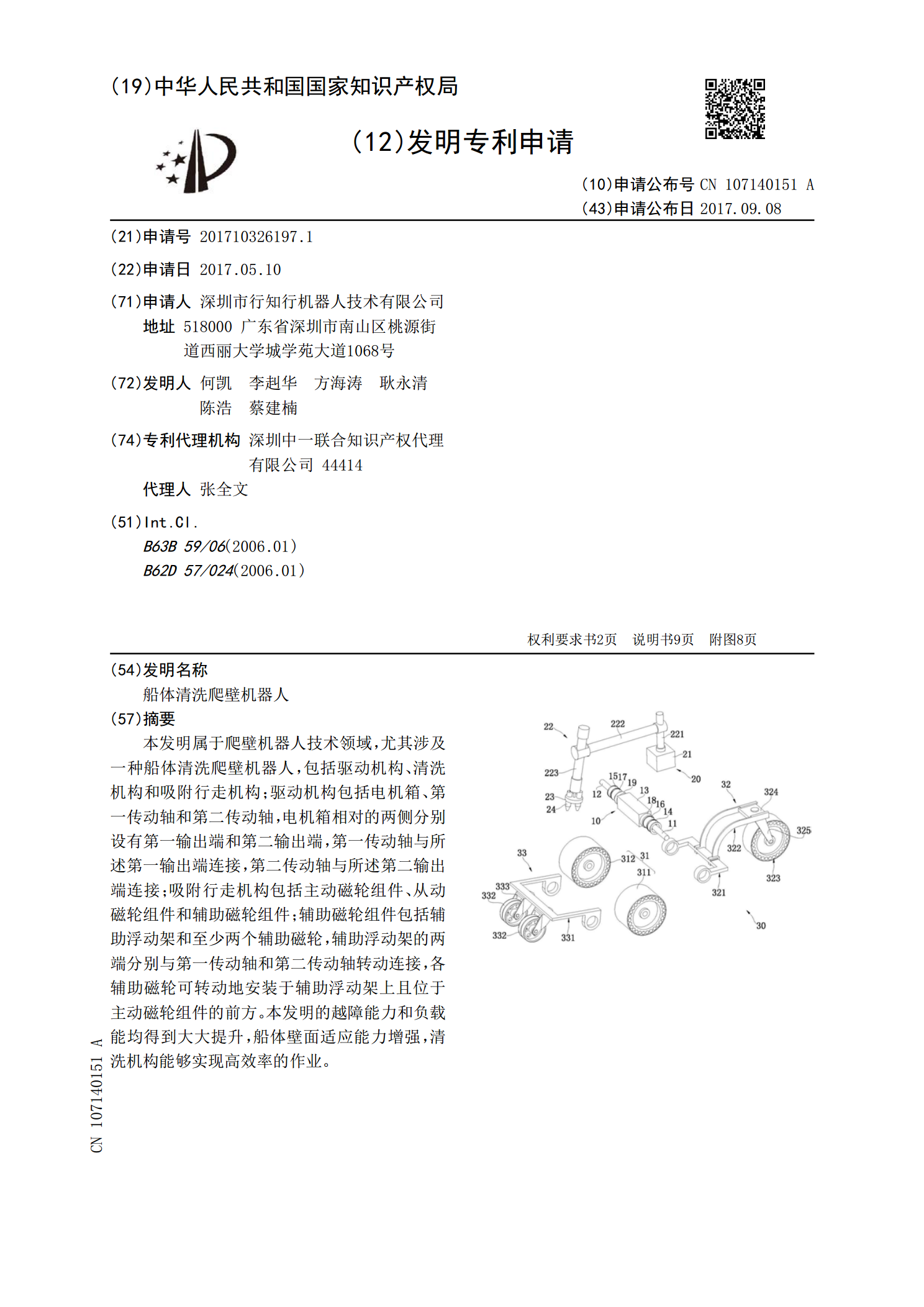
本发明属于爬壁机器人技术领域,尤其涉及一种船体清洗爬壁机器人,包括驱动机构、清洗机构和吸附行走机构;驱动机构包括电机箱、第一传动轴和第二传动轴,电机箱相对的两侧分别设有第一输出端和第二输出端,第一传动轴与所述第一输出端连接,第二传动轴与所述第二输出端连接;吸附行走机构包括主动磁轮组件、从动磁轮组件和辅助磁轮组件;辅助磁轮组件包括辅助浮动架和至少两个辅助磁轮,辅助浮动架的两端分别与第一传动轴和第二传动轴转动连接,各辅助磁轮可转动地安装于辅助浮动架上且位于主动磁轮组件的前方。本发明的越障能力和负载能均得到大大
磁吸式爬壁机器人及其工作方法.pdf
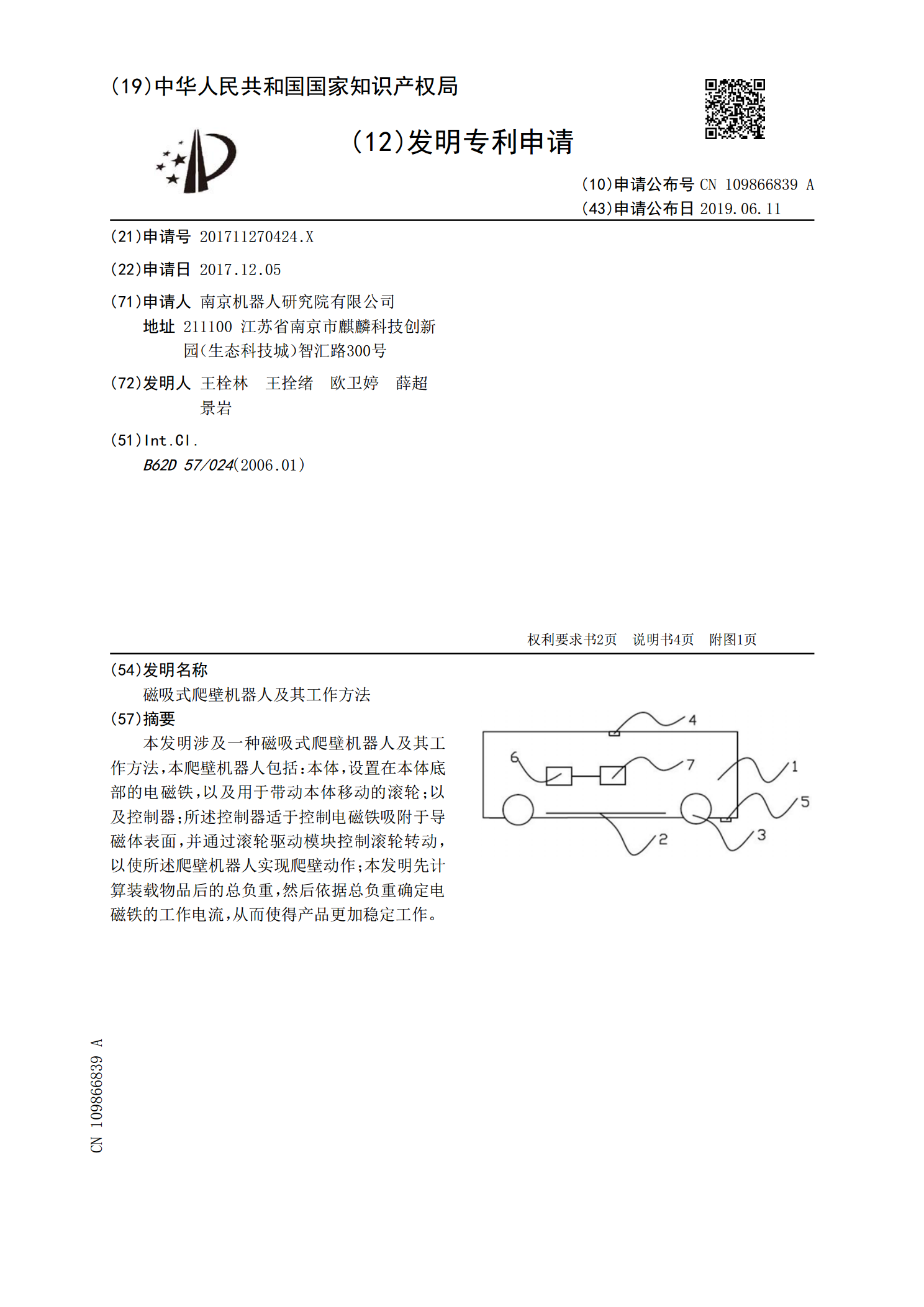
本发明涉及一种磁吸式爬壁机器人及其工作方法,本爬壁机器人包括:本体,设置在本体底部的电磁铁,以及用于带动本体移动的滚轮;以及控制器;所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作;本发明先计算装载物品后的总负重,然后依据总负重确定电磁铁的工作电流,从而使得产品更加稳定工作。