
轮式爬壁机器人及其工作方法.pdf

丹烟****魔王


1/9

2/9
3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮式爬壁机器人及其工作方法.pdf
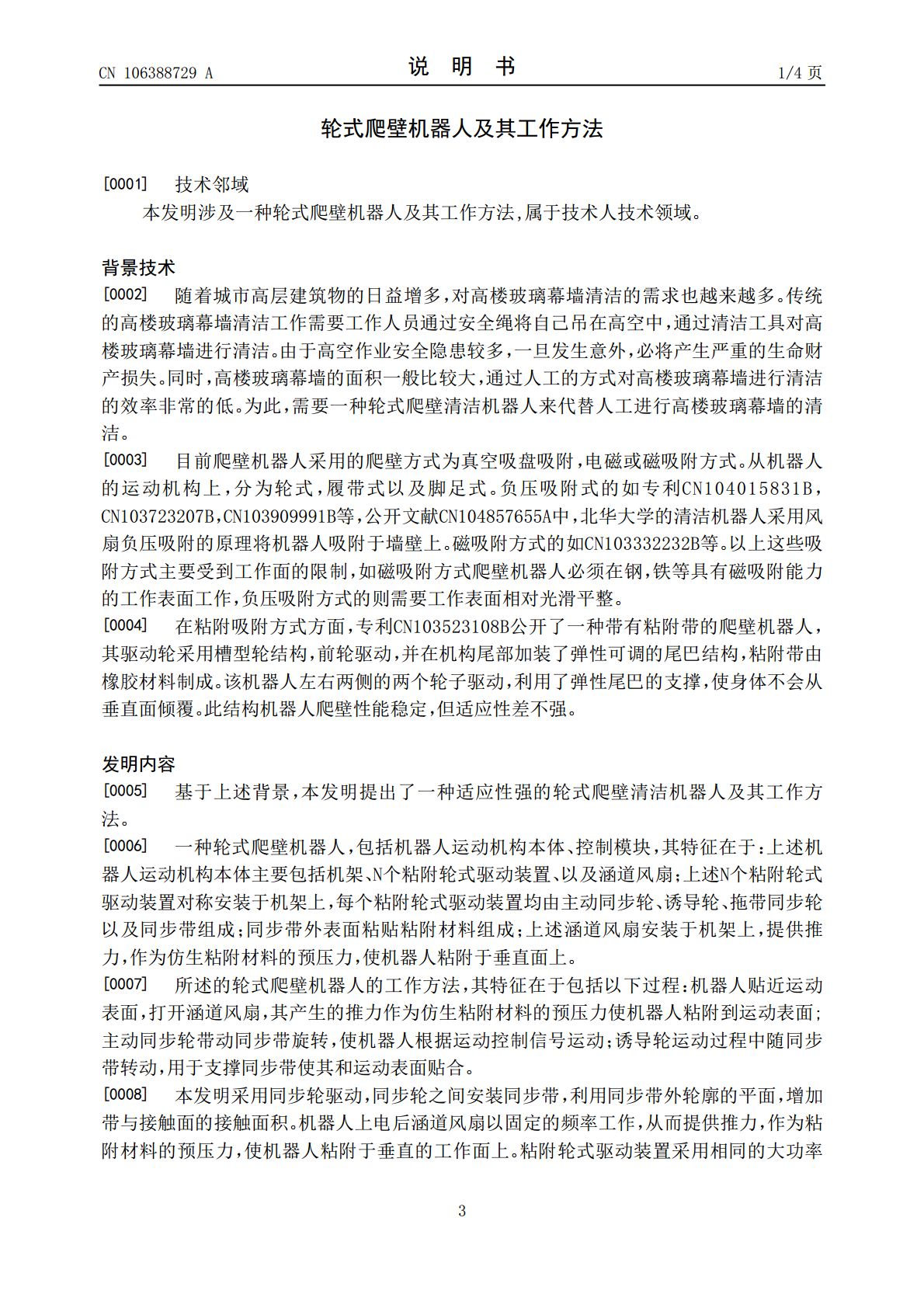
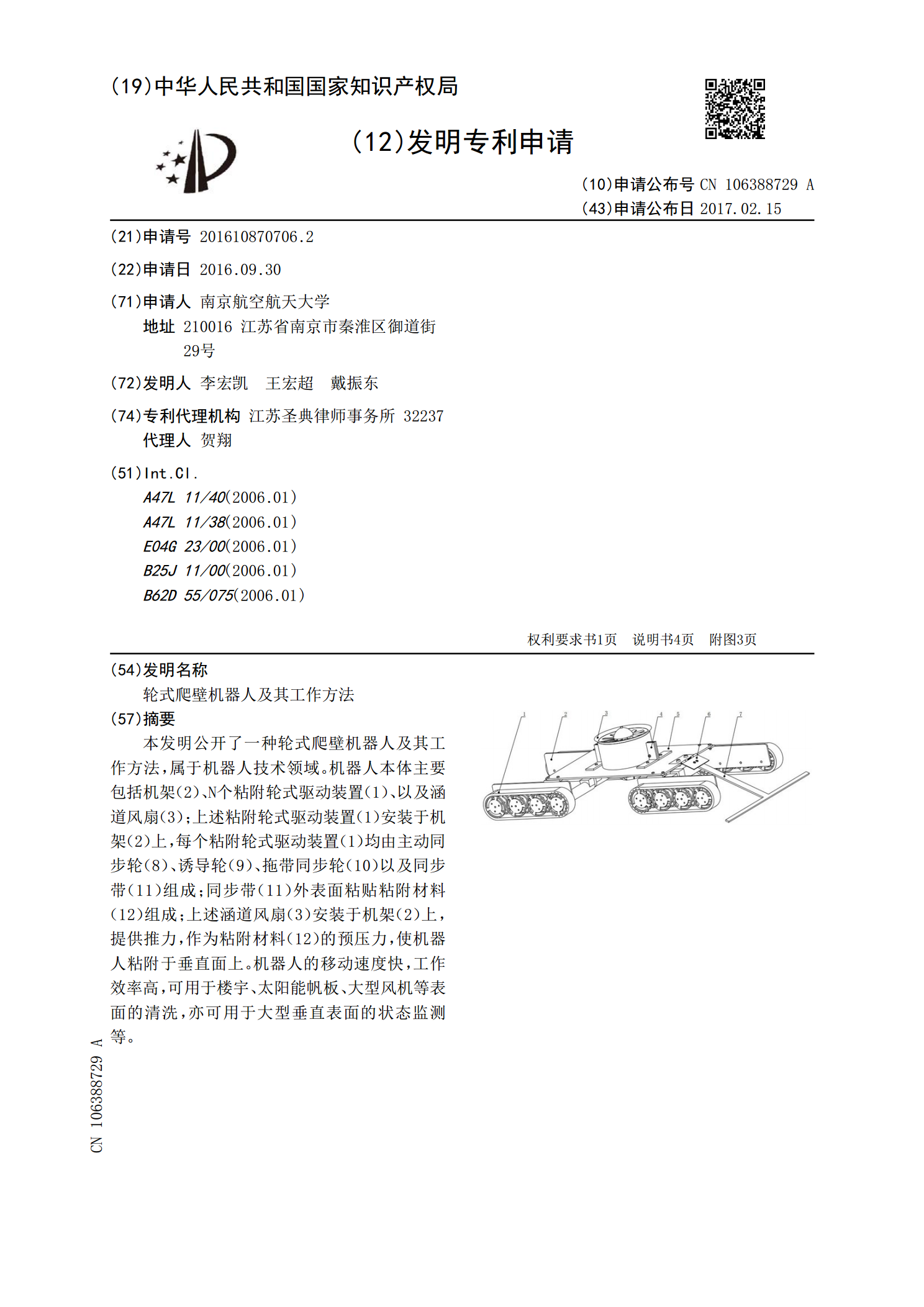
本发明公开了一种轮式爬壁机器人及其工作方法,属于机器人技术领域。机器人本体主要包括机架(2)、N个粘附轮式驱动装置(1)、以及涵道风扇(3);上述粘附轮式驱动装置(1)安装于机架(2)上,每个粘附轮式驱动装置(1)均由主动同步轮(8)、诱导轮(9)、拖带同步轮(10)以及同步带(11)组成;同步带(11)外表面粘贴粘附材料(12)组成;上述涵道风扇(3)安装于机架(2)上,提供推力,作为粘附材料(12)的预压力,使机器人粘附于垂直面上。机器人的移动速度快,工作效率高,可用于楼宇、太阳能帆板、大型风机等表面

类轮式爬壁机器人.pdf
本发明公开了一种类轮式爬壁机器人,包括机体,在所述机体的尾端设有平衡装置,在所述机体的左右两侧设有对称布置的类轮结构,每个所述类轮结构均安装在一驱动轴上,所述驱动轴安装在所述机体上;所述类轮结构设有套装在对应所述驱动轴上的轮轴座和周向均布固定在所述轮轴座上的3~5个轮辐,所述轮辐采用弧形曲面结构,且在所述弧形曲面结构的外侧设有吸附结构,所述吸附结构与墙面的接触面积大于所述轮辐与所述吸附结构的接触面积,相邻的两个所述轮辐之间设有跨距。本发明运动速度快、越障能力强、接触面积大、吸附性强。
永磁轮式爬壁机器人.pdf
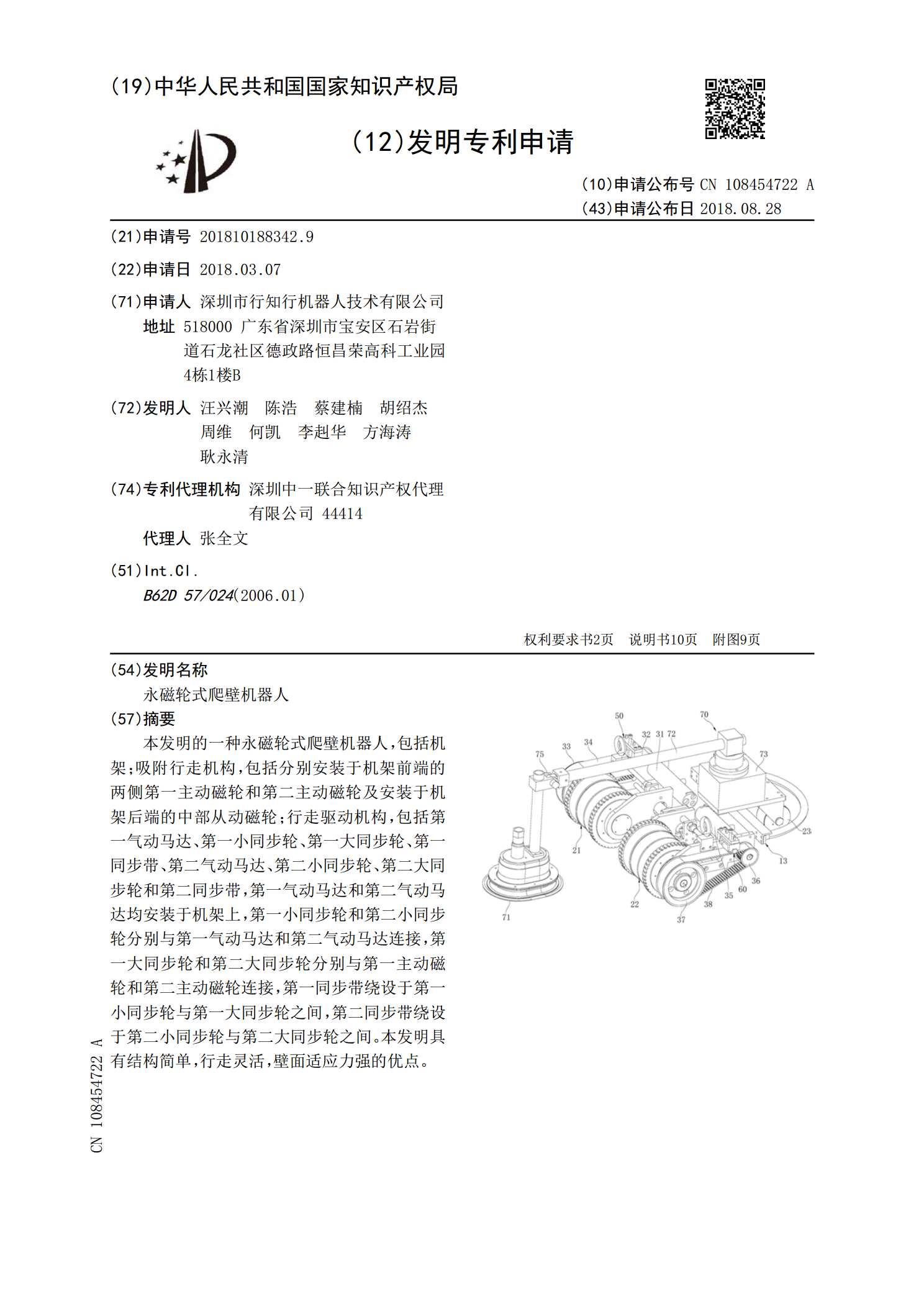
本发明的一种永磁轮式爬壁机器人,包括机架;吸附行走机构,包括分别安装于机架前端的两侧第一主动磁轮和第二主动磁轮及安装于机架后端的中部从动磁轮;行走驱动机构,包括第一气动马达、第一小同步轮、第一大同步轮、第一同步带、第二气动马达、第二小同步轮、第二大同步轮和第二同步带,第一气动马达和第二气动马达均安装于机架上,第一小同步轮和第二小同步轮分别与第一气动马达和第二气动马达连接,第一大同步轮和第二大同步轮分别与第一主动磁轮和第二主动磁轮连接,第一同步带绕设于第一小同步轮与第一大同步轮之间,第二同步带绕设于第二小同

轮式越障爬壁机器人.pdf
一种机器人技术领域的轮式越障爬壁机器人,包括:机器人车架、三组移动吸附机构及其对应的直线滑轨、丝杠及驱动电机,三组直线滑轨以及丝杠竖直设置于机器人车架下方且两端分别与机器人车架及移动吸附机构相连,驱动电机与移动吸附机构固定连接。本发明解决现有爬壁机器人在垂直壁面作业时存在的问题,机器人既具有轮式移动机器人速度快和转向灵活、履带式移动机器人磁吸附力大的特点,同时还具有好的越障能力,能满足在复杂环境中运动和作业的需求。
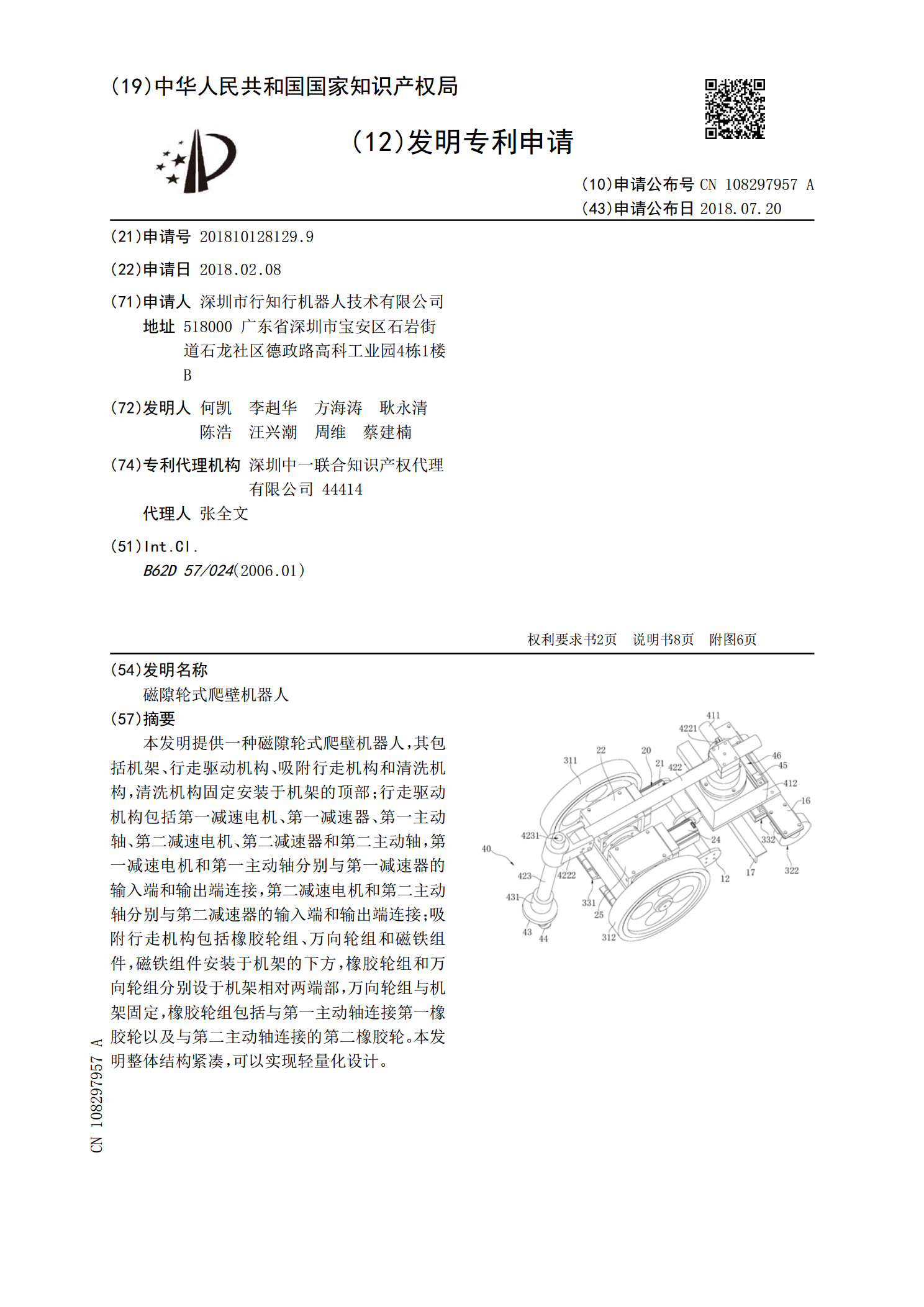
磁隙轮式爬壁机器人.pdf
本发明提供一种磁隙轮式爬壁机器人,其包括机架、行走驱动机构、吸附行走机构和清洗机构,清洗机构固定安装于机架的顶部;行走驱动机构包括第一减速电机、第一减速器、第一主动轴、第二减速电机、第二减速器和第二主动轴,第一减速电机和第一主动轴分别与第一减速器的输入端和输出端连接,第二减速电机和第二主动轴分别与第二减速器的输入端和输出端连接;吸附行走机构包括橡胶轮组、万向轮组和磁铁组件,磁铁组件安装于机架的下方,橡胶轮组和万向轮组分别设于机架相对两端部,万向轮组与机架固定,橡胶轮组包括与第一主动轴连接第一橡胶轮以及与第