
固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法.pdf

一条****贺6


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法.pdf
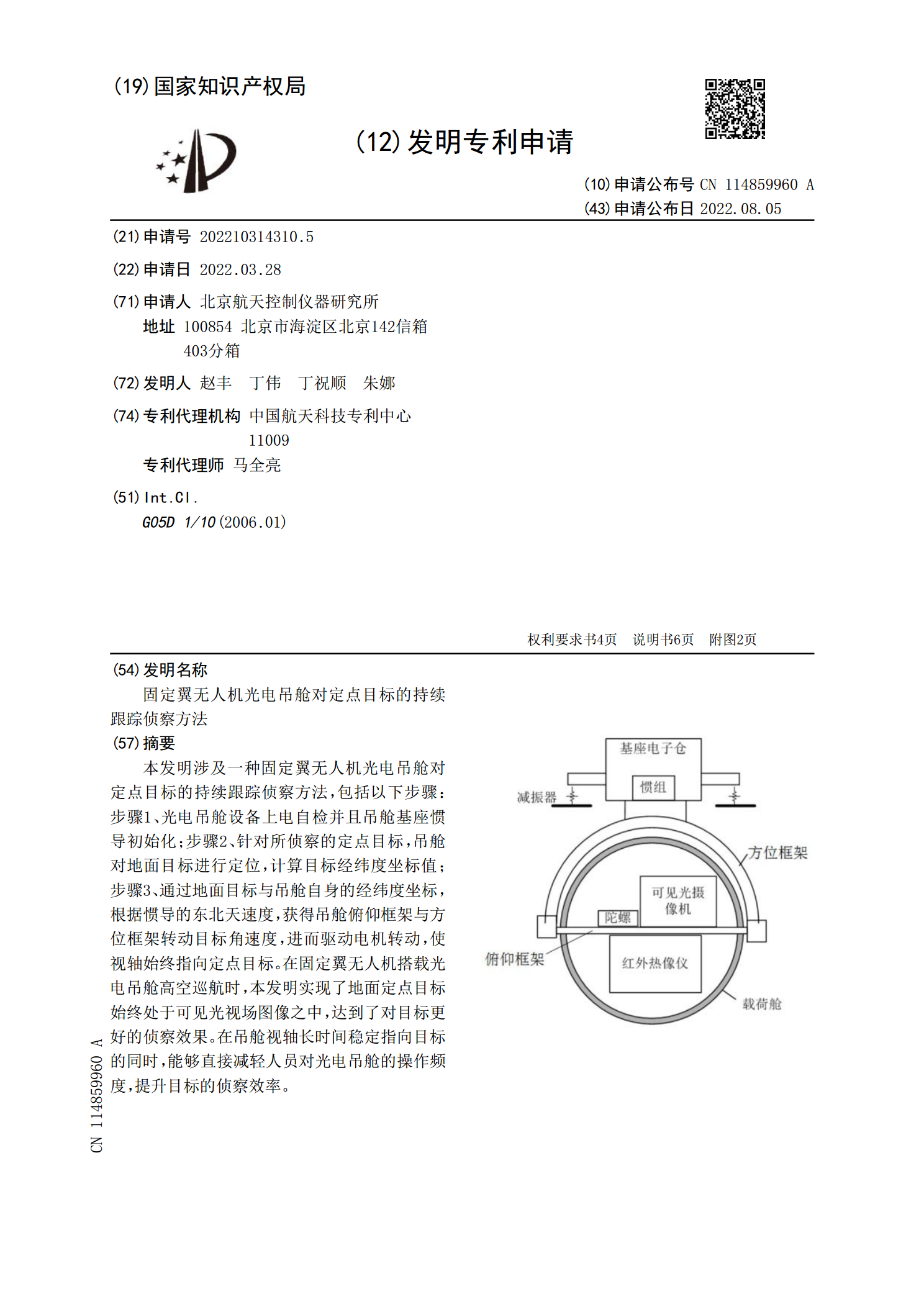
本发明涉及一种固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法,包括以下步骤:步骤1、光电吊舱设备上电自检并且吊舱基座惯导初始化;步骤2、针对所侦察的定点目标,吊舱对地面目标进行定位,计算目标经纬度坐标值;步骤3、通过地面目标与吊舱自身的经纬度坐标,根据惯导的东北天速度,获得吊舱俯仰框架与方位框架转动目标角速度,进而驱动电机转动,使视轴始终指向定点目标。在固定翼无人机搭载光电吊舱高空巡航时,本发明实现了地面定点目标始终处于可见光视场图像之中,达到了对目标更好的侦察效果。在吊舱视轴长时间稳定指向目标的同时,
吊舱控制方法、装置、吊舱、无人机及介质.pdf
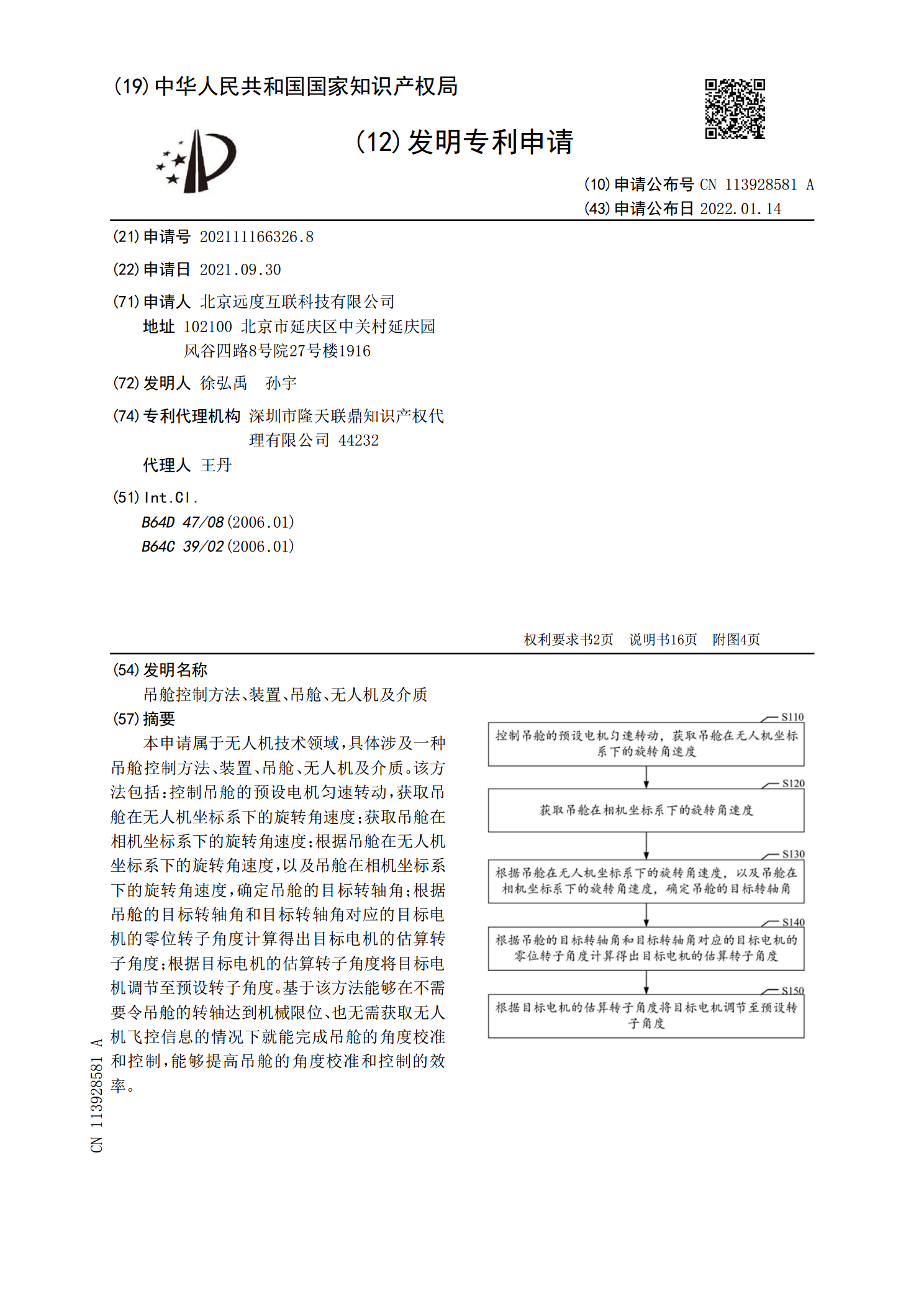
本申请属于无人机技术领域,具体涉及一种吊舱控制方法、装置、吊舱、无人机及介质。该方法包括:控制吊舱的预设电机匀速转动,获取吊舱在无人机坐标系下的旋转角速度;获取吊舱在相机坐标系下的旋转角速度;根据吊舱在无人机坐标系下的旋转角速度,以及吊舱在相机坐标系下的旋转角速度,确定吊舱的目标转轴角;根据吊舱的目标转轴角和目标转轴角对应的目标电机的零位转子角度计算得出目标电机的估算转子角度;根据目标电机的估算转子角度将目标电机调节至预设转子角度。基于该方法能够在不需要令吊舱的转轴达到机械限位、也无需获取无人机飞控信息的
吊舱控制方法、装置、吊舱、无人机及介质.pdf
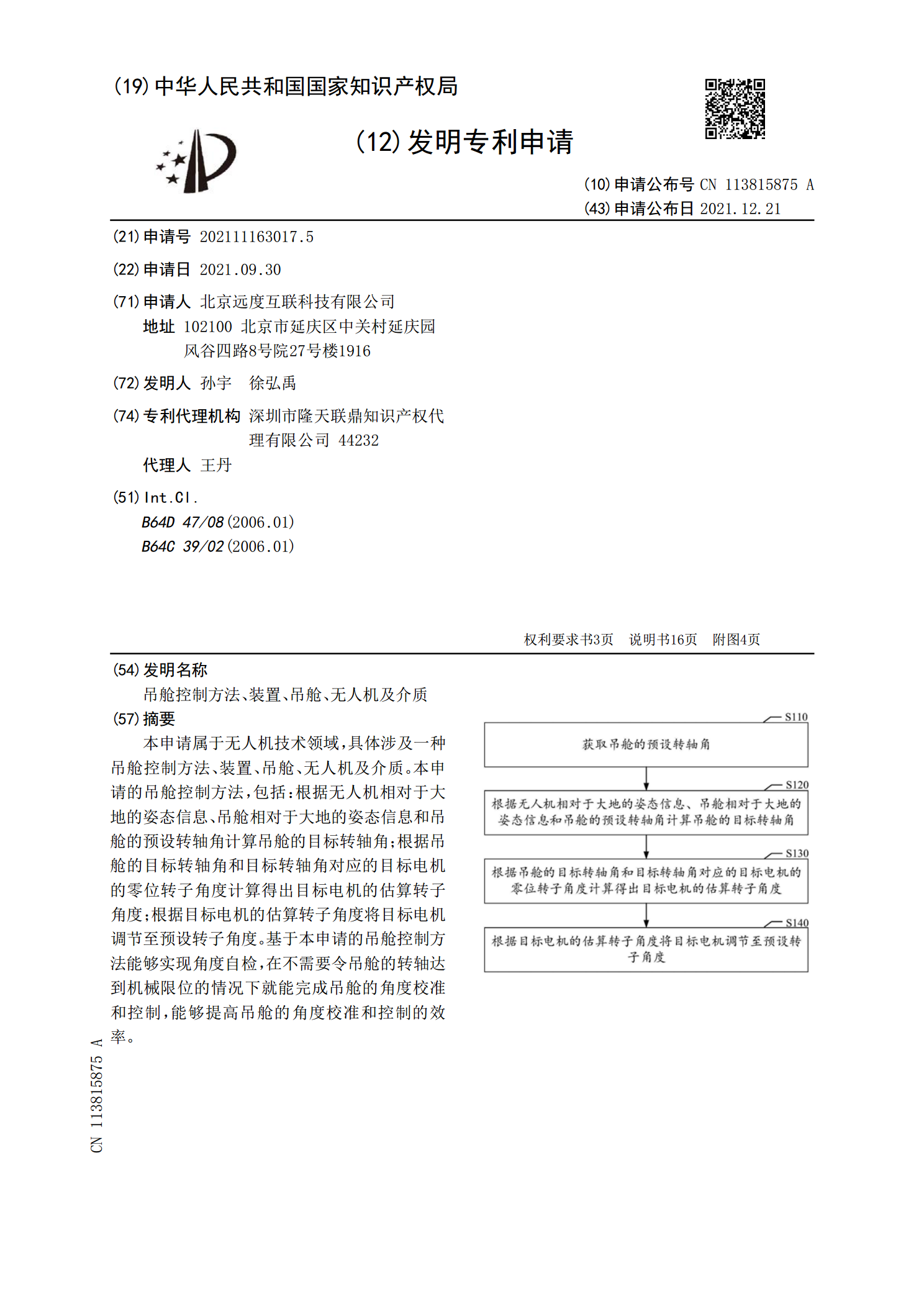
本申请属于无人机技术领域,具体涉及一种吊舱控制方法、装置、吊舱、无人机及介质。本申请的吊舱控制方法,包括:根据无人机相对于大地的姿态信息、吊舱相对于大地的姿态信息和吊舱的预设转轴角计算吊舱的目标转轴角;根据吊舱的目标转轴角和目标转轴角对应的目标电机的零位转子角度计算得出目标电机的估算转子角度;根据目标电机的估算转子角度将目标电机调节至预设转子角度。基于本申请的吊舱控制方法能够实现角度自检,在不需要令吊舱的转轴达到机械限位的情况下就能完成吊舱的角度校准和控制,能够提高吊舱的角度校准和控制的效率。
伞降固定翼无人机自主定点回收方法.pdf
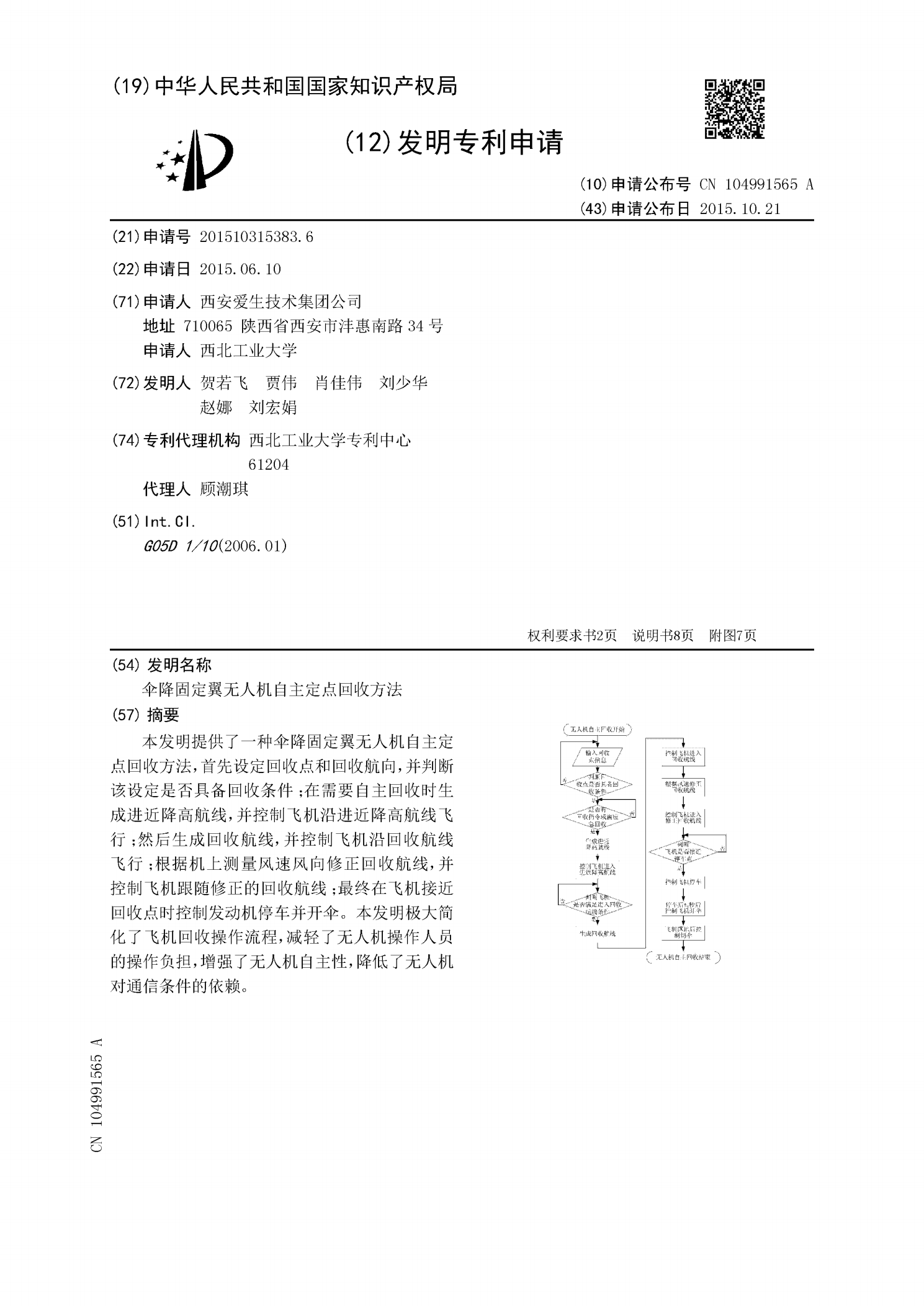
本发明提供了一种伞降固定翼无人机自主定点回收方法,首先设定回收点和回收航向,并判断该设定是否具备回收条件;在需要自主回收时生成进近降高航线,并控制飞机沿进近降高航线飞行;然后生成回收航线,并控制飞机沿回收航线飞行;根据机上测量风速风向修正回收航线,并控制飞机跟随修正的回收航线;最终在飞机接近回收点时控制发动机停车并开伞。本发明极大简化了飞机回收操作流程,减轻了无人机操作人员的操作负担,增强了无人机自主性,降低了无人机对通信条件的依赖。
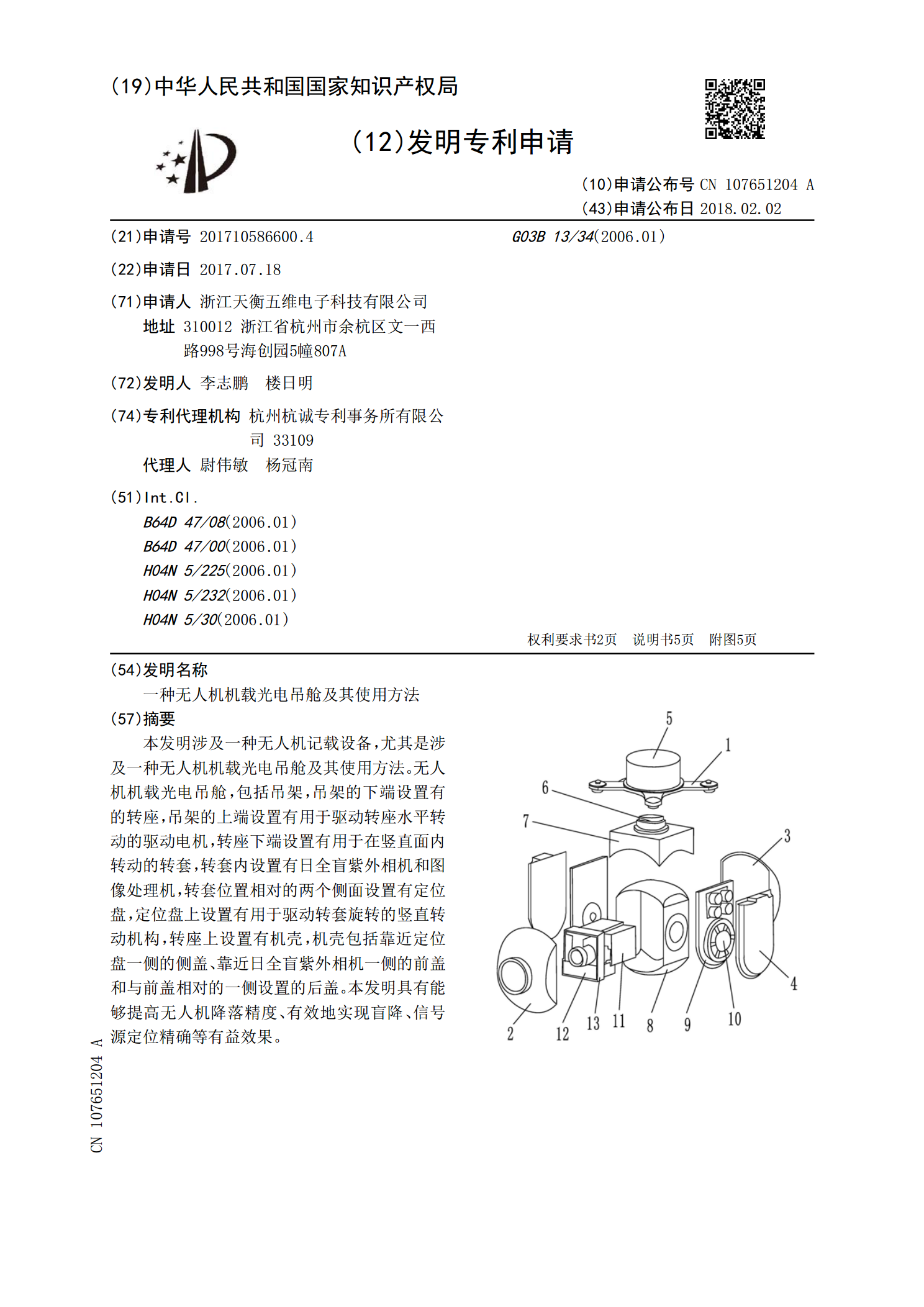
一种无人机机载光电吊舱及其使用方法.pdf
本发明涉及一种无人机记载设备,尤其是涉及一种无人机机载光电吊舱及其使用方法。无人机机载光电吊舱,包括吊架,吊架的下端设置有的转座,吊架的上端设置有用于驱动转座水平转动的驱动电机,转座下端设置有用于在竖直面内转动的转套,转套内设置有日全盲紫外相机和图像处理机,转套位置相对的两个侧面设置有定位盘,定位盘上设置有用于驱动转套旋转的竖直转动机构,转座上设置有机壳,机壳包括靠近定位盘一侧的侧盖、靠近日全盲紫外相机一侧的前盖和与前盖相对的一侧设置的后盖。本发明具有能够提高无人机降落精度、有效地实现盲降、信号源定位精确