
一种追踪人脸口罩机器人的实验装置.pdf

是你****松呀


1/8

2/8

3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

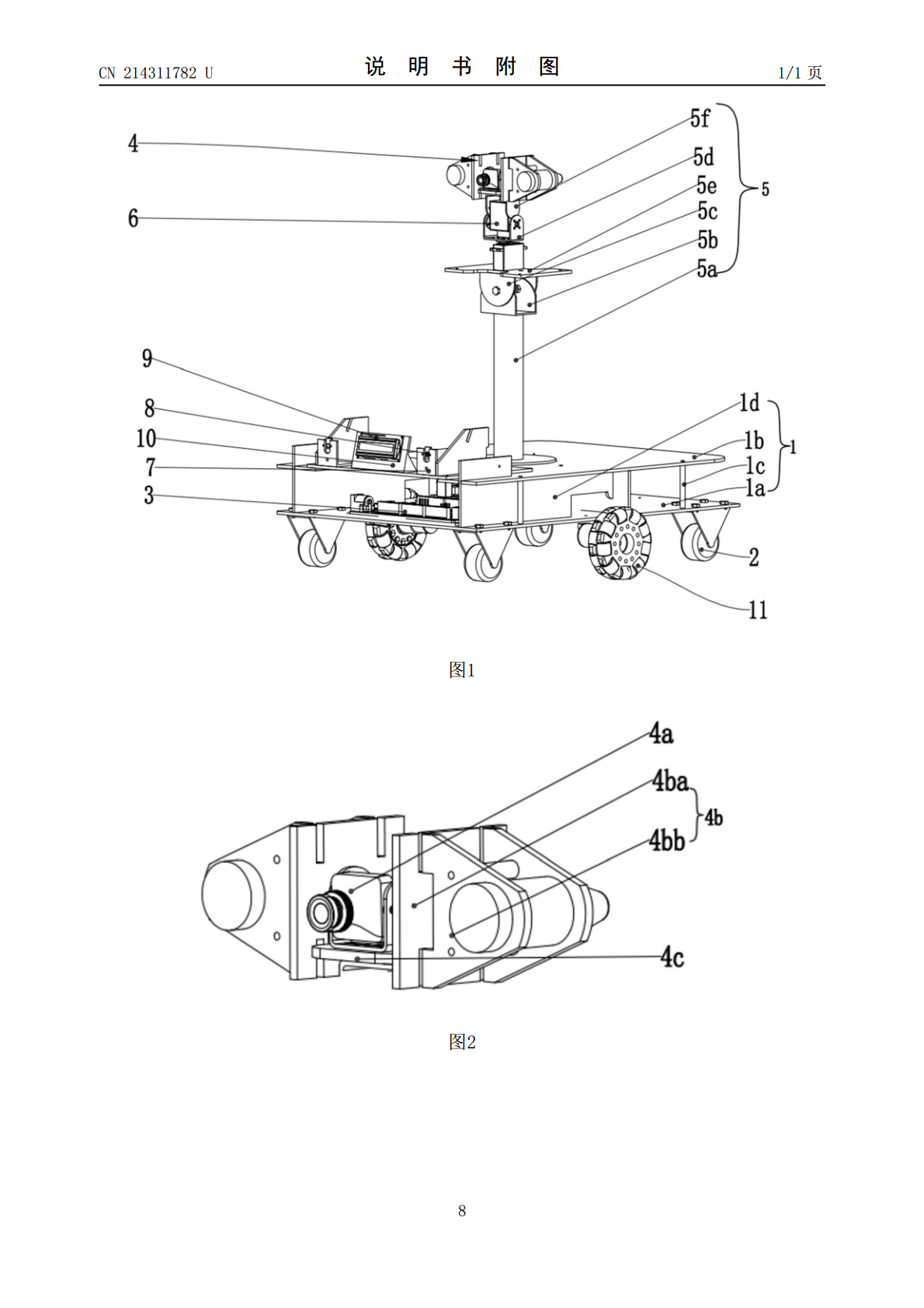
一种追踪人脸口罩机器人的实验装置.pdf
一种追踪人脸口罩机器人的实验装置,涉及环境监控技术领域。本实用新型采用检测装置拍摄当前画面,并将当前画面传输至处理器,所述处理器集成了PyramidBox人脸算法与PyramidBox口罩识别模型,能够识别出当前图像中是否有人以及该人是否佩戴口罩。本实用新型为了避免机械主体的体积过大而影响到公共场所的行走面积,将机械主体设置为较小板材加上滚轮的结构,对应所述机械主体较小的体积的缺点就是所述检测装置无法有效的检测出人脸。而为了保证所述检测装置所拍摄到的画面能够识别人脸,在所述第二安装板上安装固定有所述高位组

一种机器人追踪方法及追踪装置.pdf
本发明公开了一种机器人追踪方法及追踪装置,图像采集模块与图像处理模块相连再连接至PLC控制器,定位模块、自动轨迹生成模块和红外避障传感模块与PLC控制器输入端相连,PLC控制器输出端与电机驱动模块、蜂鸣器和液晶显示模块相连,PLC控制器通过电机驱动模块驱动机器人行进,PLC控制器通过无线通信模块与远程终端双向通信。本发明提供的机器人追踪方法及追踪装置,在现有技术的机器人基础上进行改进,控制机器人自动模拟生成行进的轨迹曲线并避障行驶,通过图像采集并进行处理后传送至PLC控制器进行匹配处理,追踪所有目标工件的

一种人脸特征信息的追踪方法、装置及系统.pdf
本发明提供了一种人脸特征信息的追踪方法、装置及系统,涉及图像识别的技术领域,该方法包括:获取待处理的第一图像帧和已处理的第二图像帧,第一图像帧和第二图像帧为视频流中的至少一对连续图像帧,第一图像帧中包括预估人脸框,第二图像帧中包括已检测到的人脸框;采用深度神经网络模型对第一图像帧的预估人脸框所标识的区域和第二图像帧的已检测到的人脸框所标识的区域进行处理,基于处理结果追踪第一图像帧的人脸特征信息,人脸特征信息包括人脸框和/或人脸特征点,解决了现有技术中的人脸定位追踪方法在应对复杂人脸移动时,人脸识别的准确度

一种机器人追踪浇注装置.pdf
本发明涉及一种浇注领域,尤其涉及一种机器人追踪浇注装置。包括:一相机,设置在机器人的末端,用于获取浇注口的轮廓信息并发送至机器人;脉冲编码器,设置在所述模具上,用于实时获取所述模具转动过程中的脉冲信息并发送至所述机器人;多个发泡剂存储箱,设置在转台的上方,用于存储不同的发泡剂;一发泡枪,与发泡剂存储箱连接,设置在机器人末端,用于将发泡剂以一预设流速注入模具。上述技术方案的有益效果是:能够在不停止转台的状态下准确高效完成整个浇注成型过程,且能满足模架倾斜不同角度。
一种基于人脸识别的人员轨迹追踪方法与装置.pdf
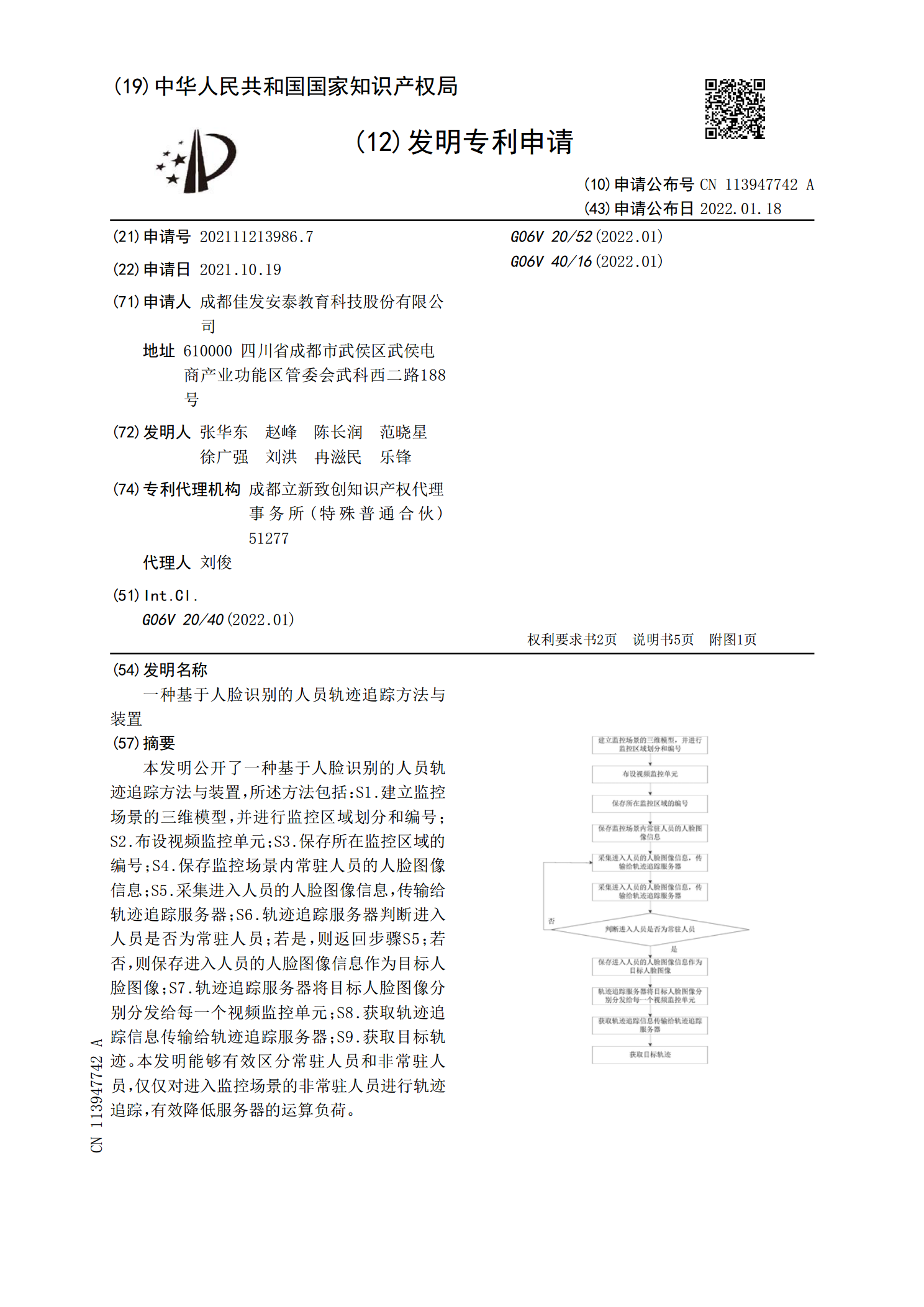
本发明公开了一种基于人脸识别的人员轨迹追踪方法与装置,所述方法包括:S1.建立监控场景的三维模型,并进行监控区域划分和编号;S2.布设视频监控单元;S3.保存所在监控区域的编号;S4.保存监控场景内常驻人员的人脸图像信息;S5.采集进入人员的人脸图像信息,传输给轨迹追踪服务器;S6.轨迹追踪服务器判断进入人员是否为常驻人员;若是,则返回步骤S5;若否,则保存进入人员的人脸图像信息作为目标人脸图像;S7.轨迹追踪服务器将目标人脸图像分别分发给每一个视频监控单元;S8.获取轨迹追踪信息传输给轨迹追踪服务器;S