
一种基于多雷达感知的无人船避障方法.pdf

是你****晨呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多雷达感知的无人船避障方法.pdf
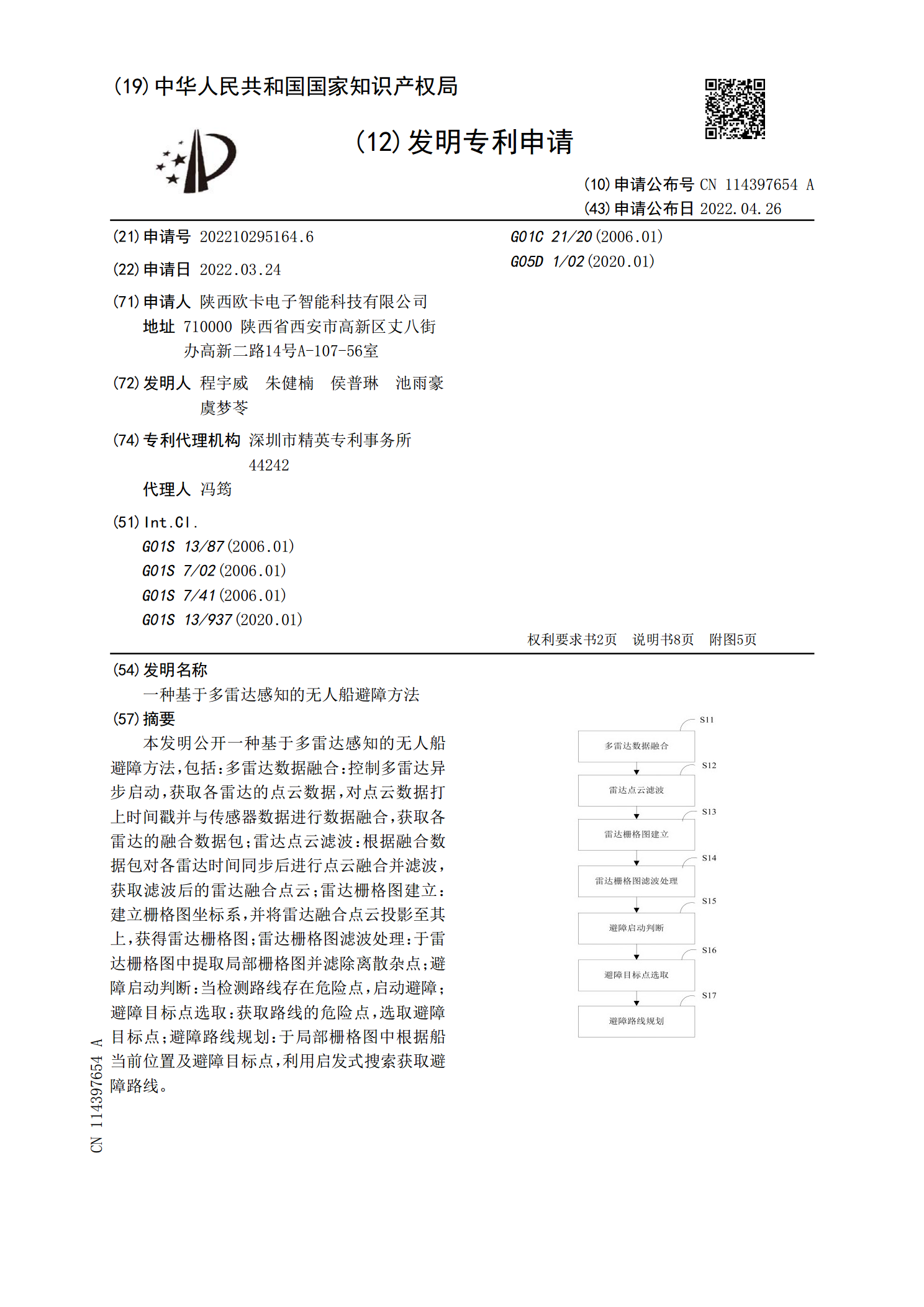
本发明公开一种基于多雷达感知的无人船避障方法,包括:多雷达数据融合:控制多雷达异步启动,获取各雷达的点云数据,对点云数据打上时间戳并与传感器数据进行数据融合,获取各雷达的融合数据包;雷达点云滤波:根据融合数据包对各雷达时间同步后进行点云融合并滤波,获取滤波后的雷达融合点云;雷达栅格图建立:建立栅格图坐标系,并将雷达融合点云投影至其上,获得雷达栅格图;雷达栅格图滤波处理:于雷达栅格图中提取局部栅格图并滤除离散杂点;避障启动判断:当检测路线存在危险点,启动避障;避障目标点选取:获取路线的危险点,选取避障目标点
无人船避障方法及其系统.pdf
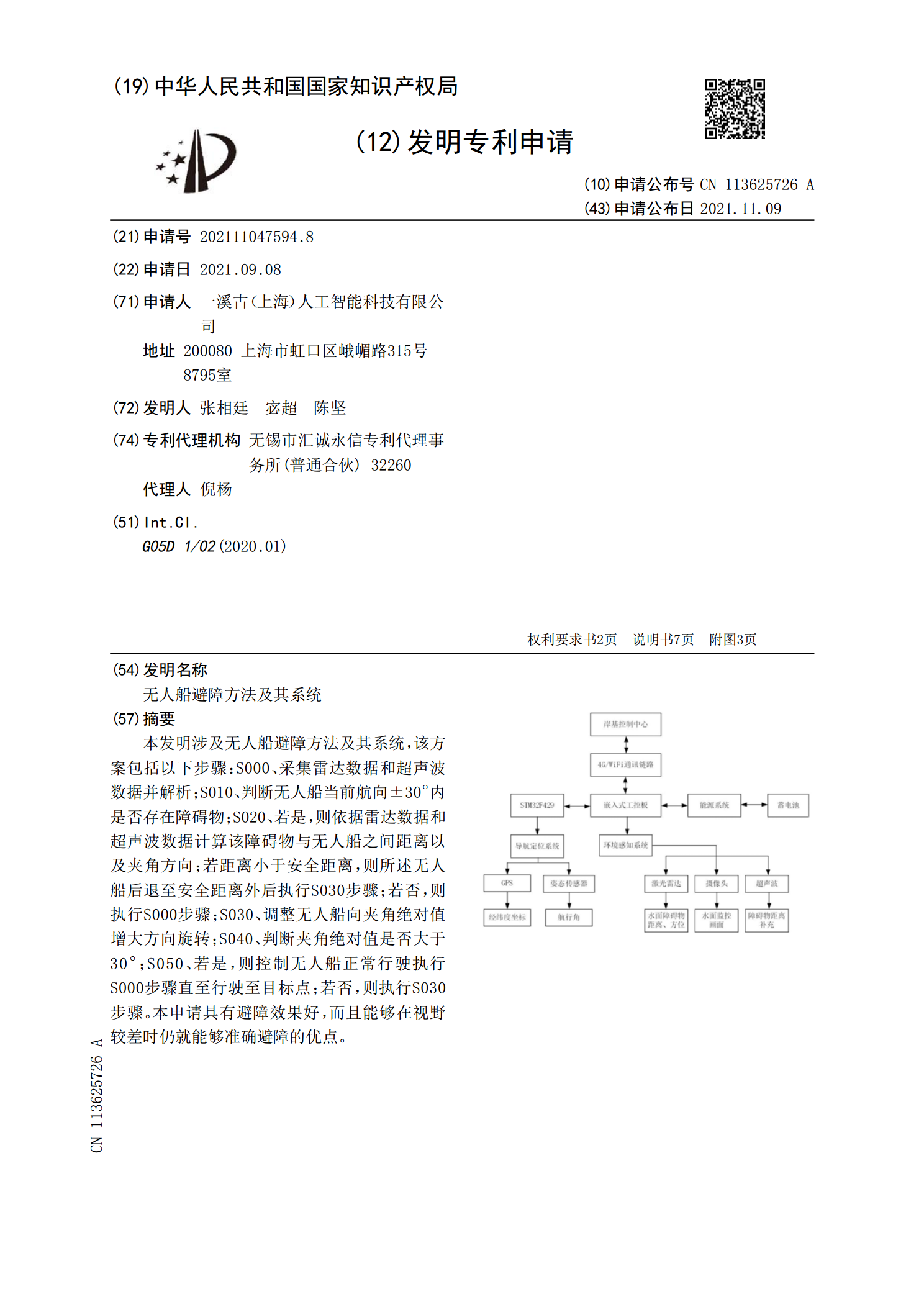
本发明涉及无人船避障方法及其系统,该方案包括以下步骤:S000、采集雷达数据和超声波数据并解析;S010、判断无人船当前航向±30°内是否存在障碍物;S020、若是,则依据雷达数据和超声波数据计算该障碍物与无人船之间距离以及夹角方向;若距离小于安全距离,则所述无人船后退至安全距离外后执行S030步骤;若否,则执行S000步骤;S030、调整无人船向夹角绝对值增大方向旋转;S040、判断夹角绝对值是否大于30°;S050、若是,则控制无人船正常行驶执行S000步骤直至行驶至目标点;若否,则执行S030步骤。
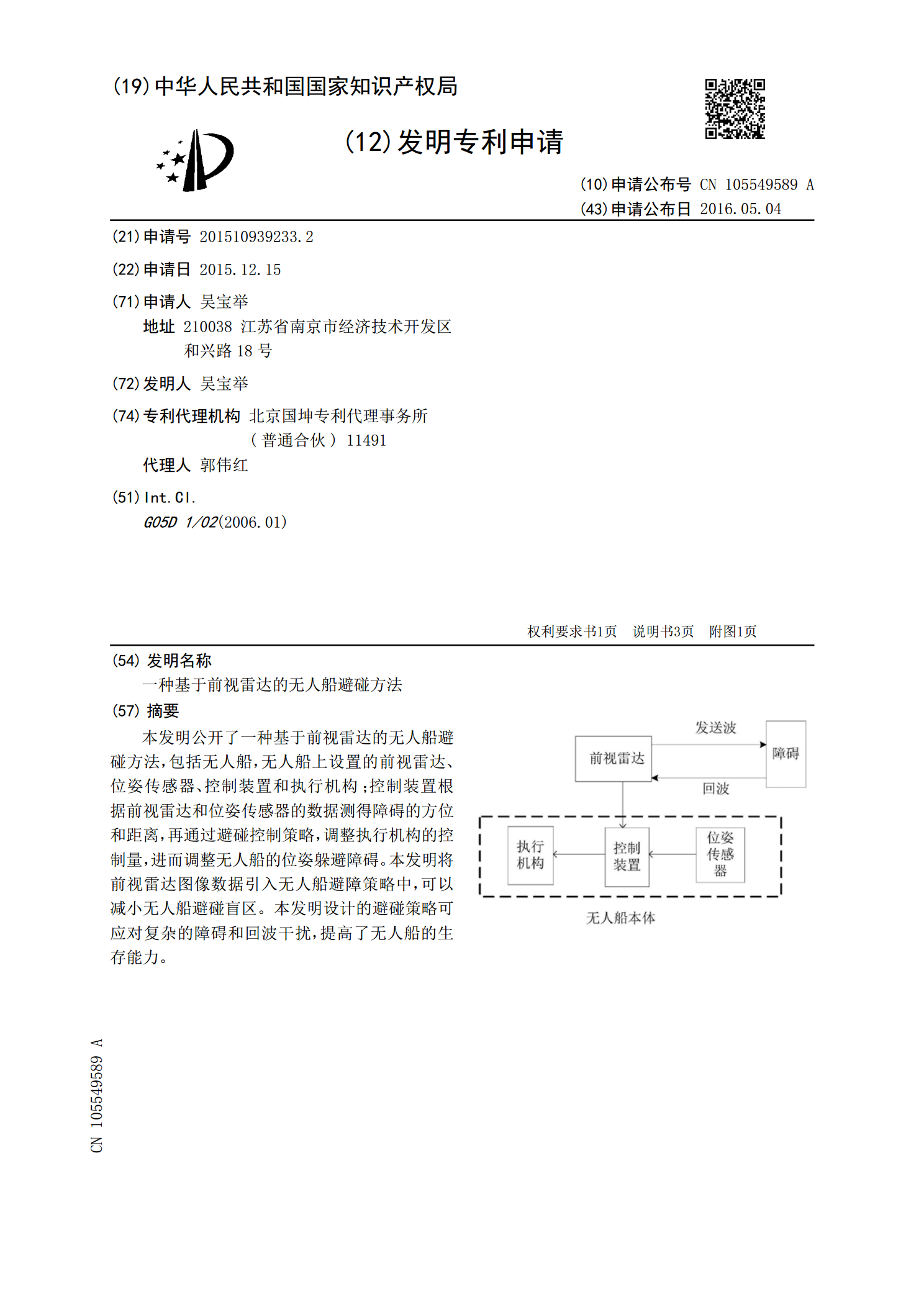
一种基于前视雷达的无人船避碰方法.pdf
本发明公开了一种基于前视雷达的无人船避碰方法,包括无人船,无人船上设置的前视雷达、位姿传感器、控制装置和执行机构;控制装置根据前视雷达和位姿传感器的数据测得障碍的方位和距离,再通过避碰控制策略,调整执行机构的控制量,进而调整无人船的位姿躲避障碍。本发明将前视雷达图像数据引入无人船避障策略中,可以减小无人船避碰盲区。本发明设计的避碰策略可应对复杂的障碍和回波干扰,提高了无人船的生存能力。
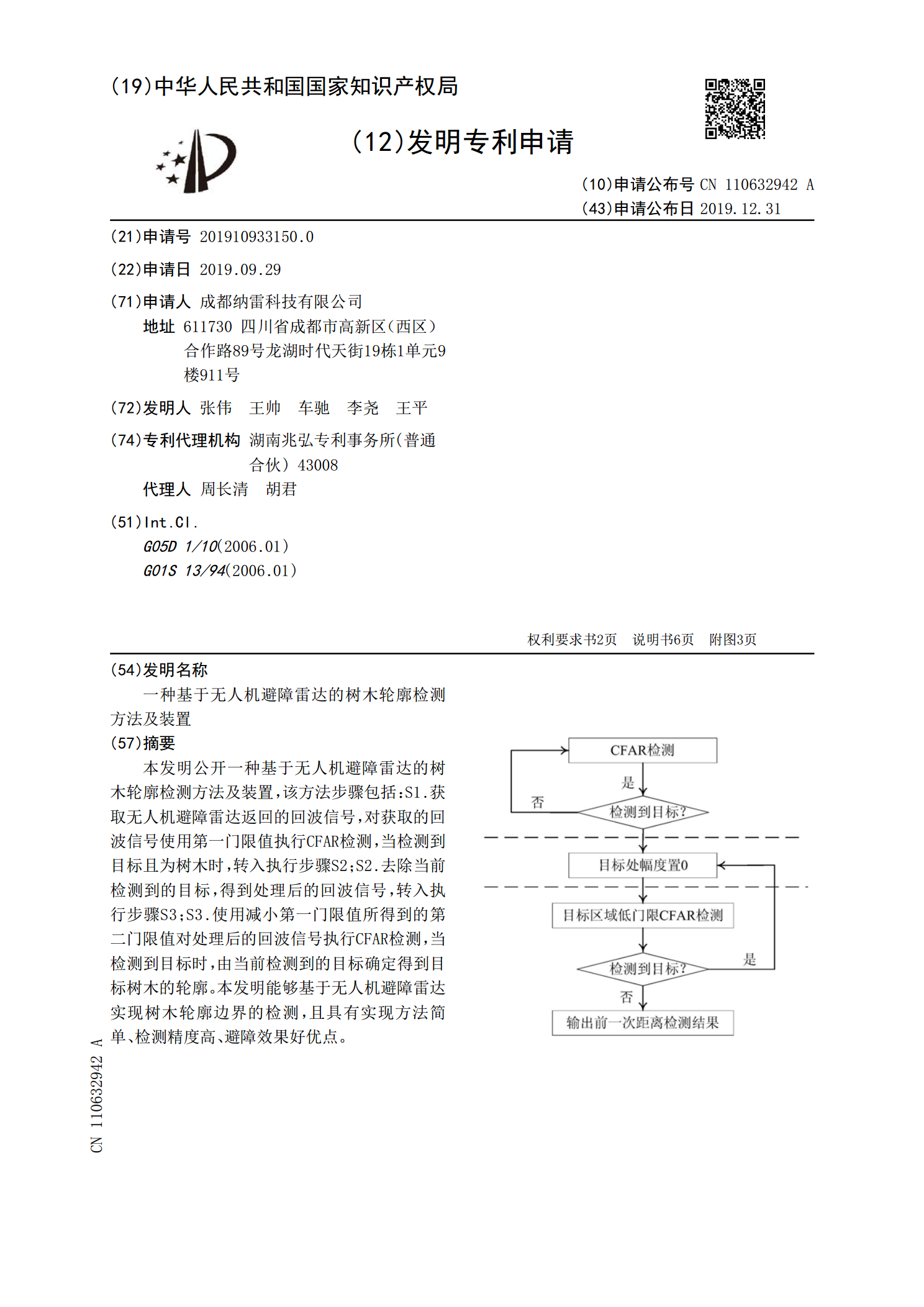
一种基于无人机避障雷达的树木轮廓检测方法及装置.pdf
本发明公开一种基于无人机避障雷达的树木轮廓检测方法及装置,该方法步骤包括:S1.获取无人机避障雷达返回的回波信号,对获取的回波信号使用第一门限值执行CFAR检测,当检测到目标且为树木时,转入执行步骤S2;S2.去除当前检测到的目标,得到处理后的回波信号,转入执行步骤S3;S3.使用减小第一门限值所得到的第二门限值对处理后的回波信号执行CFAR检测,当检测到目标时,由当前检测到的目标确定得到目标树木的轮廓。本发明能够基于无人机避障雷达实现树木轮廓边界的检测,且具有实现方法简单、检测精度高、避障效果好优点。
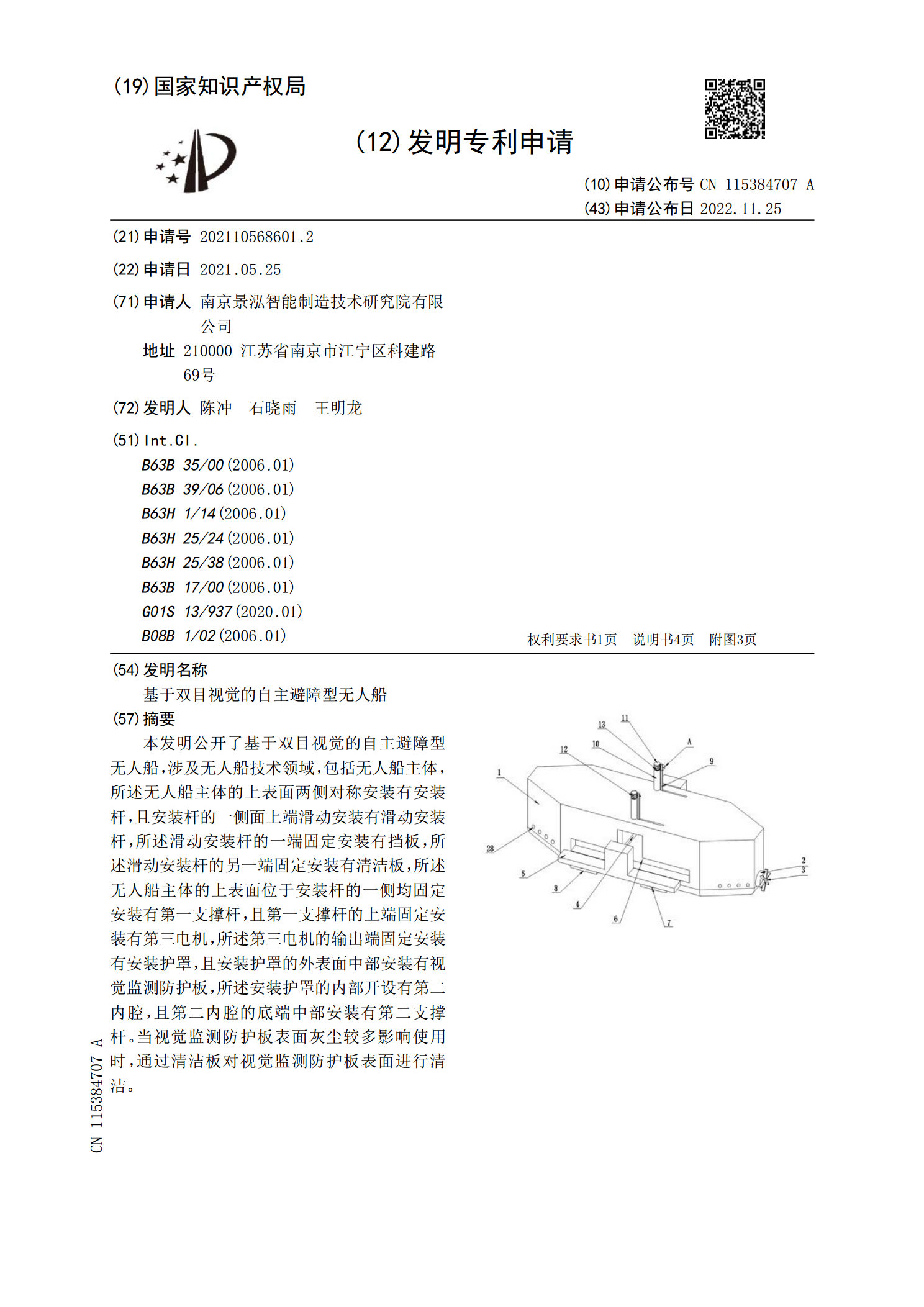
基于双目视觉的自主避障型无人船.pdf
本发明公开了基于双目视觉的自主避障型无人船,涉及无人船技术领域,包括无人船主体,所述无人船主体的上表面两侧对称安装有安装杆,且安装杆的一侧面上端滑动安装有滑动安装杆,所述滑动安装杆的一端固定安装有挡板,所述滑动安装杆的另一端固定安装有清洁板,所述无人船主体的上表面位于安装杆的一侧均固定安装有第一支撑杆,且第一支撑杆的上端固定安装有第三电机,所述第三电机的输出端固定安装有安装护罩,且安装护罩的外表面中部安装有视觉监测防护板,所述安装护罩的内部开设有第二内腔,且第二内腔的底端中部安装有第二支撑杆。当视觉监测防