
一种基于前视雷达的无人船避碰方法.pdf

元容****少女


1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于前视雷达的无人船避碰方法.pdf
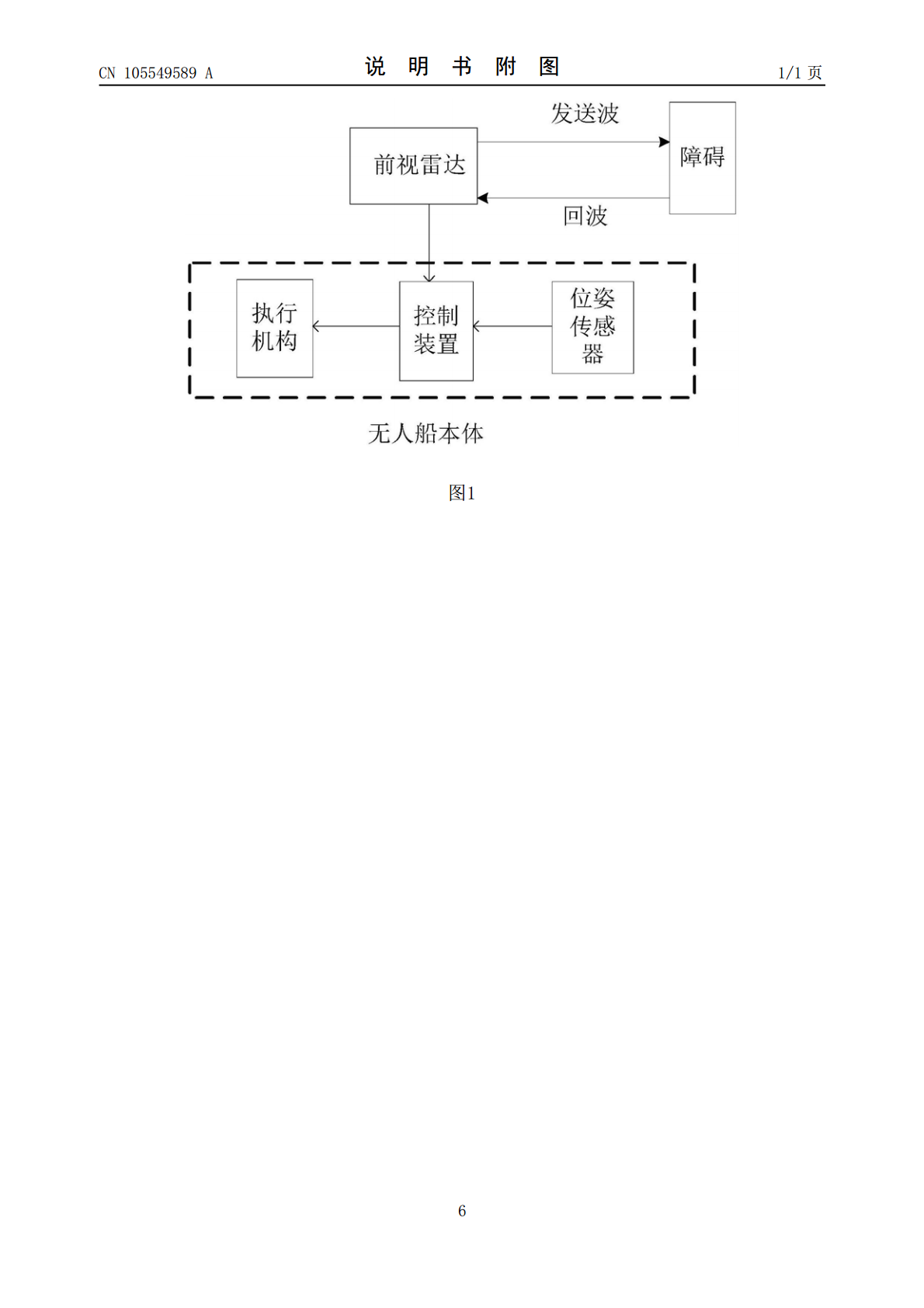
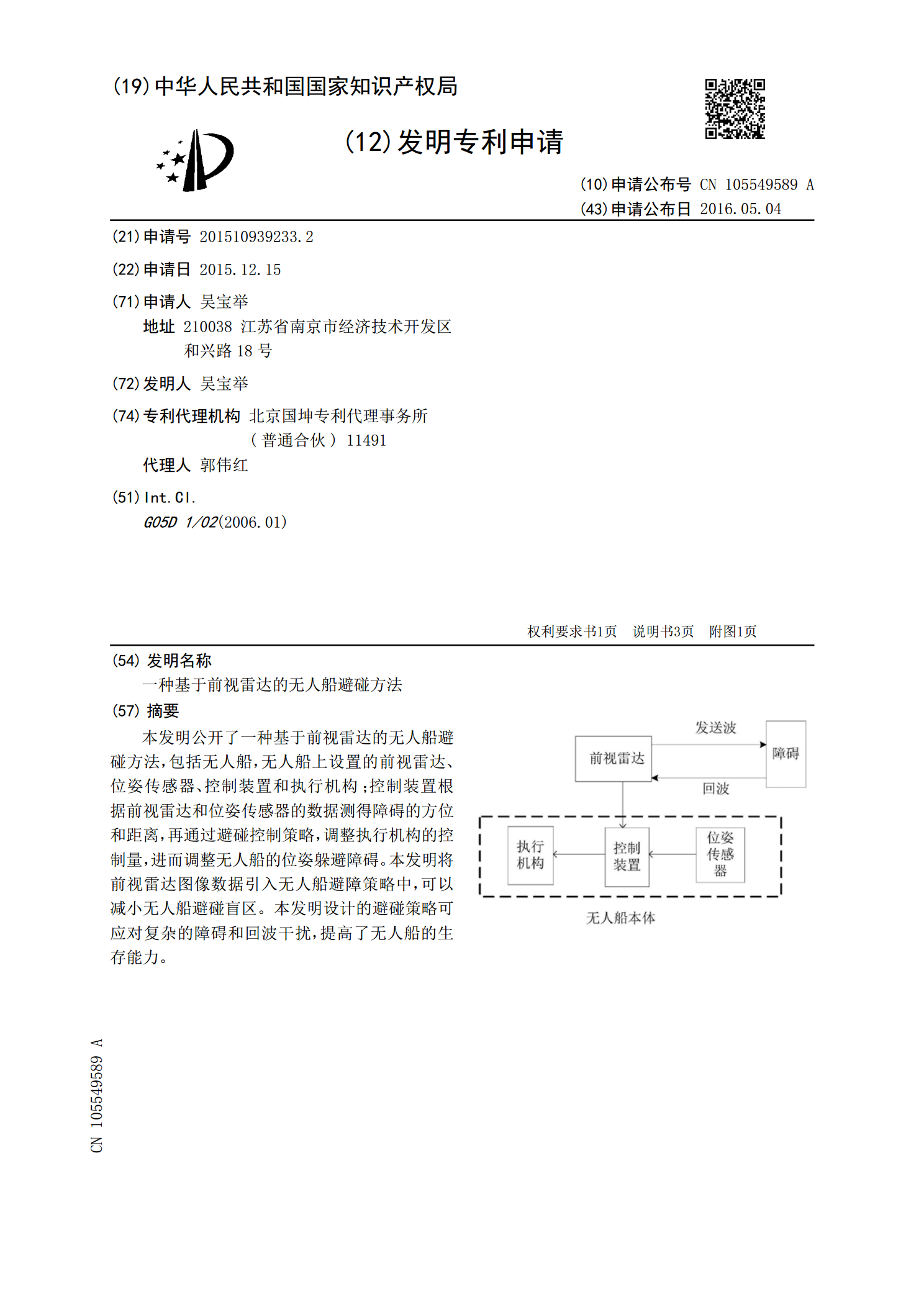
本发明公开了一种基于前视雷达的无人船避碰方法,包括无人船,无人船上设置的前视雷达、位姿传感器、控制装置和执行机构;控制装置根据前视雷达和位姿传感器的数据测得障碍的方位和距离,再通过避碰控制策略,调整执行机构的控制量,进而调整无人船的位姿躲避障碍。本发明将前视雷达图像数据引入无人船避障策略中,可以减小无人船避碰盲区。本发明设计的避碰策略可应对复杂的障碍和回波干扰,提高了无人船的生存能力。
一种基于多雷达感知的无人船避障方法.pdf
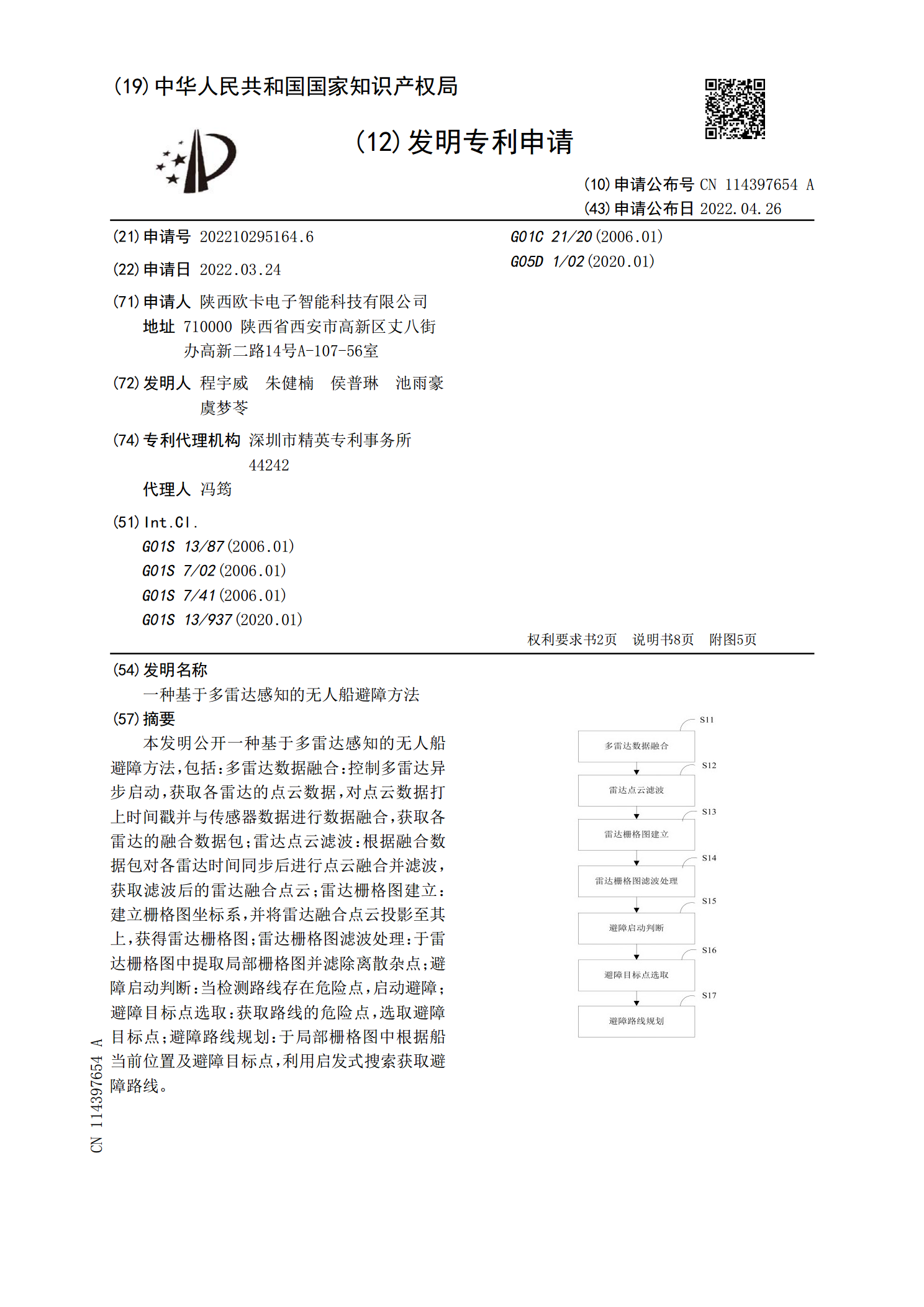
本发明公开一种基于多雷达感知的无人船避障方法,包括:多雷达数据融合:控制多雷达异步启动,获取各雷达的点云数据,对点云数据打上时间戳并与传感器数据进行数据融合,获取各雷达的融合数据包;雷达点云滤波:根据融合数据包对各雷达时间同步后进行点云融合并滤波,获取滤波后的雷达融合点云;雷达栅格图建立:建立栅格图坐标系,并将雷达融合点云投影至其上,获得雷达栅格图;雷达栅格图滤波处理:于雷达栅格图中提取局部栅格图并滤除离散杂点;避障启动判断:当检测路线存在危险点,启动避障;避障目标点选取:获取路线的危险点,选取避障目标点
一种基于前视声纳图像的避碰方法.pdf
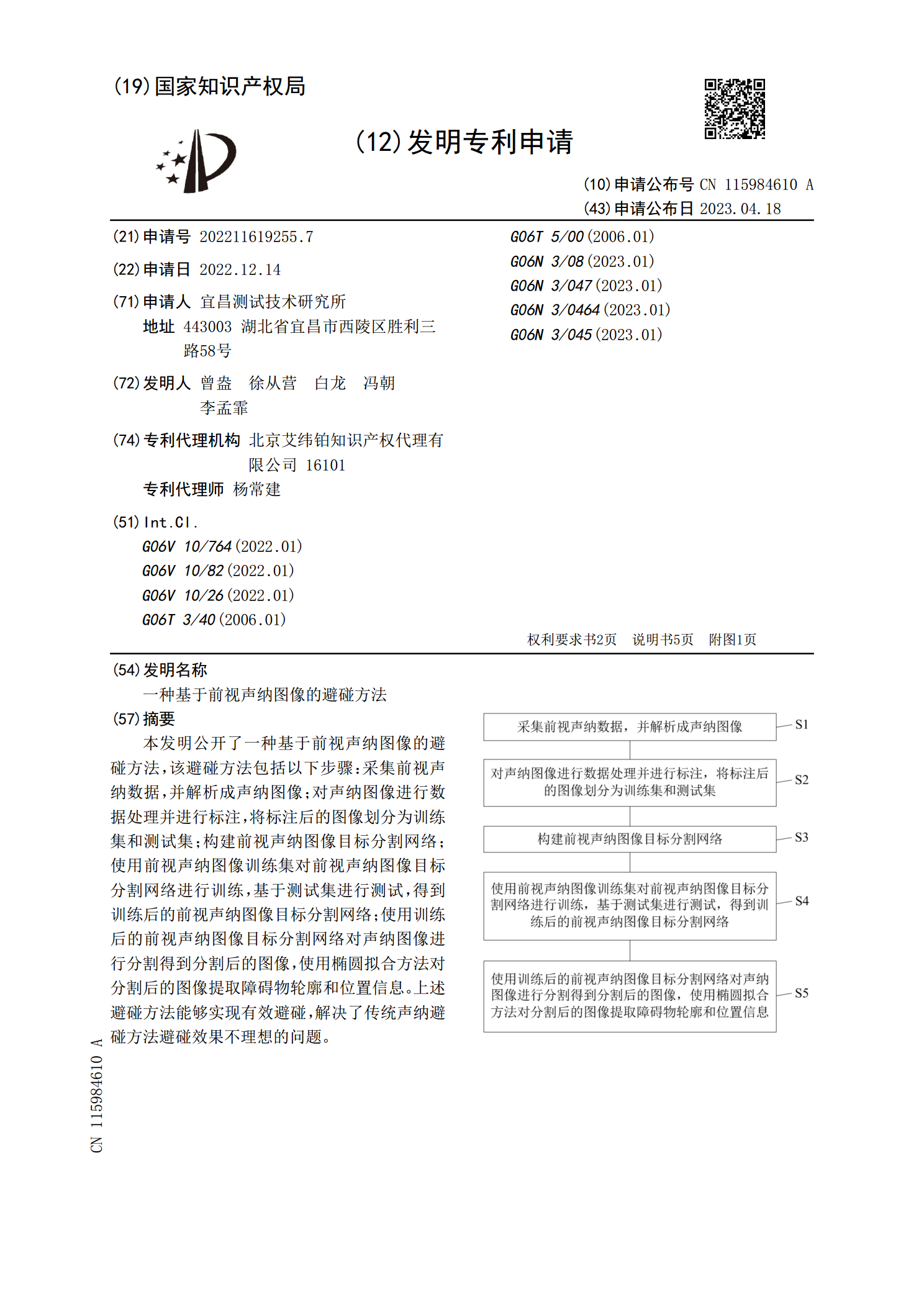
本发明公开了一种基于前视声纳图像的避碰方法,该避碰方法包括以下步骤:采集前视声纳数据,并解析成声纳图像;对声纳图像进行数据处理并进行标注,将标注后的图像划分为训练集和测试集;构建前视声纳图像目标分割网络;使用前视声纳图像训练集对前视声纳图像目标分割网络进行训练,基于测试集进行测试,得到训练后的前视声纳图像目标分割网络;使用训练后的前视声纳图像目标分割网络对声纳图像进行分割得到分割后的图像,使用椭圆拟合方法对分割后的图像提取障碍物轮廓和位置信息。上述避碰方法能够实现有效避碰,解决了传统声纳避碰方法避碰效果不
一种基于模型预测控制的内河无人船避碰方法.pdf
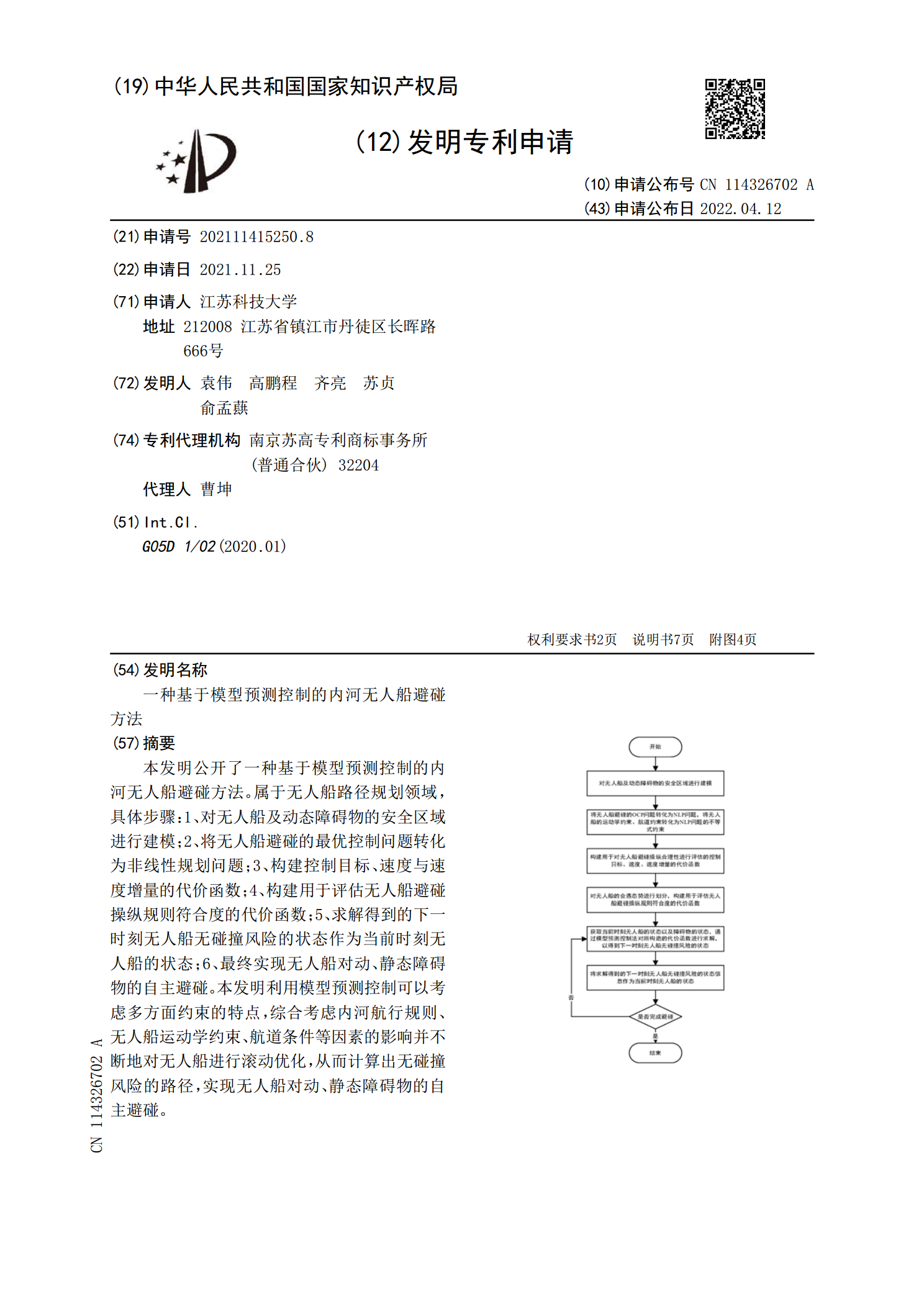
本发明公开了一种基于模型预测控制的内河无人船避碰方法。属于无人船路径规划领域,具体步骤:1、对无人船及动态障碍物的安全区域进行建模;2、将无人船避碰的最优控制问题转化为非线性规划问题;3、构建控制目标、速度与速度增量的代价函数;4、构建用于评估无人船避碰操纵规则符合度的代价函数;5、求解得到的下一时刻无人船无碰撞风险的状态作为当前时刻无人船的状态;6、最终实现无人船对动、静态障碍物的自主避碰。本发明利用模型预测控制可以考虑多方面约束的特点,综合考虑内河航行规则、无人船运动学约束、航道条件等因素的影响并不断
基于前视声纳的水下机器人避碰方法.pdf
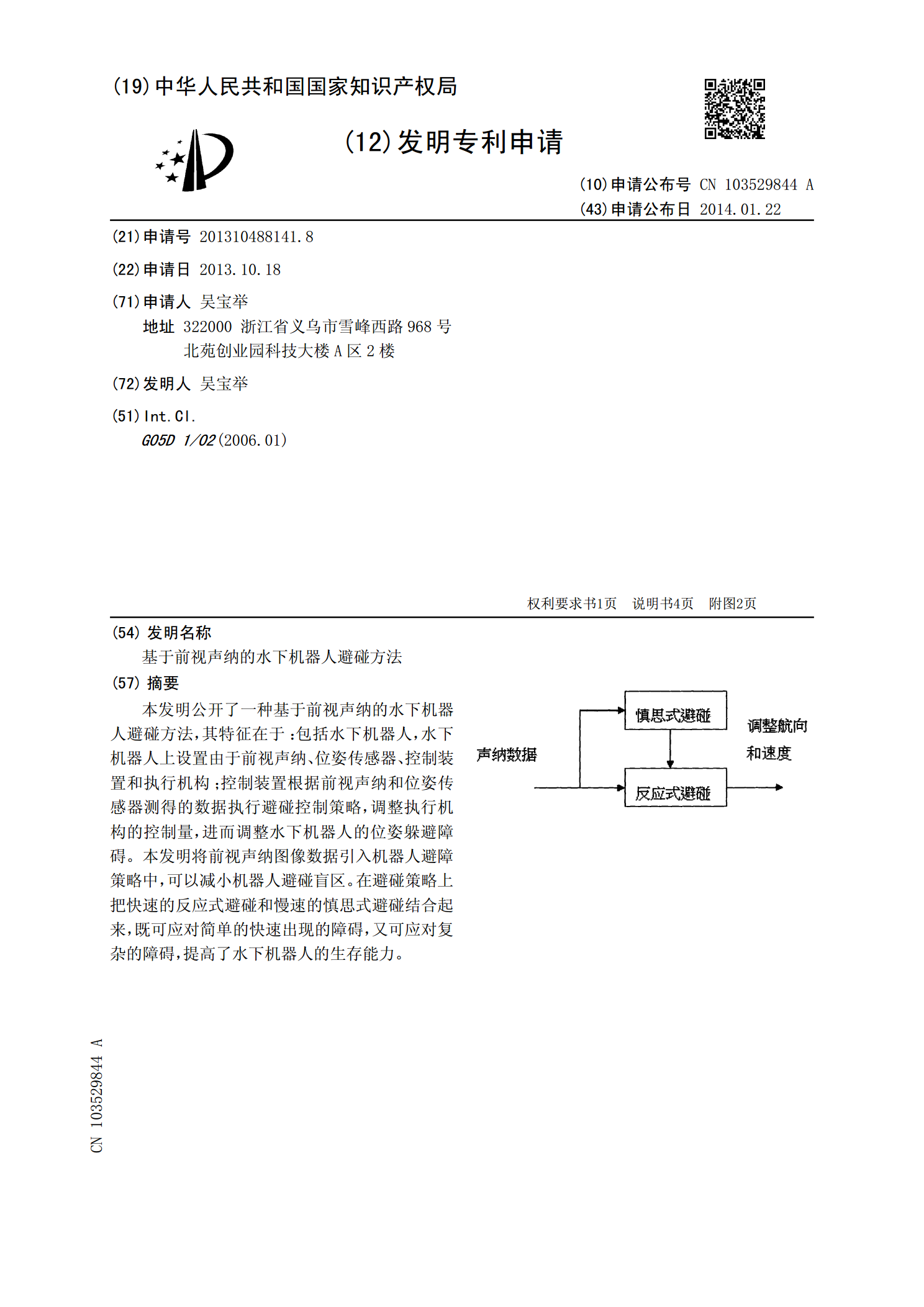
本发明公开了一种基于前视声纳的水下机器人避碰方法,其特征在于:包括水下机器人,水下机器人上设置由于前视声纳、位姿传感器、控制装置和执行机构;控制装置根据前视声纳和位姿传感器测得的数据执行避碰控制策略,调整执行机构的控制量,进而调整水下机器人的位姿躲避障碍。本发明将前视声纳图像数据引入机器人避障策略中,可以减小机器人避碰盲区。在避碰策略上把快速的反应式避碰和慢速的慎思式避碰结合起来,既可应对简单的快速出现的障碍,又可应对复杂的障碍,提高了水下机器人的生存能力。