
可识别障碍物位置的站台门激光检测装置及其控制方法.pdf

猫巷****忠娟


1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可识别障碍物位置的站台门激光检测装置及其控制方法.pdf
本发明公开了可识别障碍物位置的站台门激光检测装置及其控制方法,属于站台门安全检测技术领域,其中通过在站台门的两端分别设置第一检测组件和第二检测组件,使得两检测组件在纵向上对正,并在竖向上形成若干个由激光接收器和激光收发器构成的激光检测单元,通过至少一个激光检测单元的对应工作,可有效判断站台门与列车车体之间是否有障碍物存在,并准确判断出障碍物所处的位置。本发明的站台门激光检测装置,其结构简单,设置简便,能有效实现直线站台的站台门与列车车体之间障碍物的检测,并可准确识别障碍物的位置,缩短了障碍物排除的时间,提
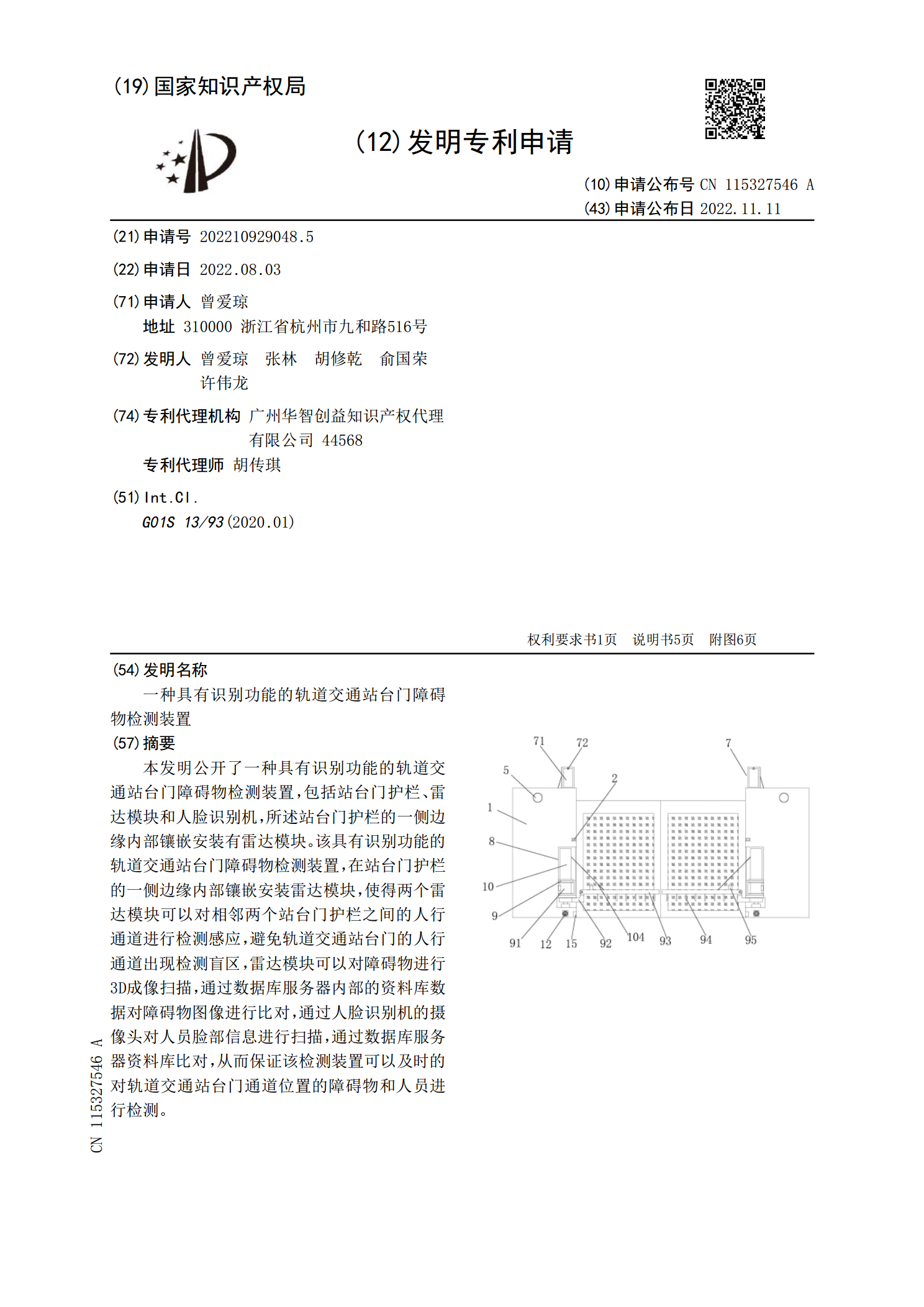
一种具有识别功能的轨道交通站台门障碍物检测装置.pdf
本发明公开了一种具有识别功能的轨道交通站台门障碍物检测装置,包括站台门护栏、雷达模块和人脸识别机,所述站台门护栏的一侧边缘内部镶嵌安装有雷达模块。该具有识别功能的轨道交通站台门障碍物检测装置,在站台门护栏的一侧边缘内部镶嵌安装雷达模块,使得两个雷达模块可以对相邻两个站台门护栏之间的人行通道进行检测感应,避免轨道交通站台门的人行通道出现检测盲区,雷达模块可以对障碍物进行3D成像扫描,通过数据库服务器内部的资料库数据对障碍物图像进行比对,通过人脸识别机的摄像头对人员脸部信息进行扫描,通过数据库服务器资料库比对
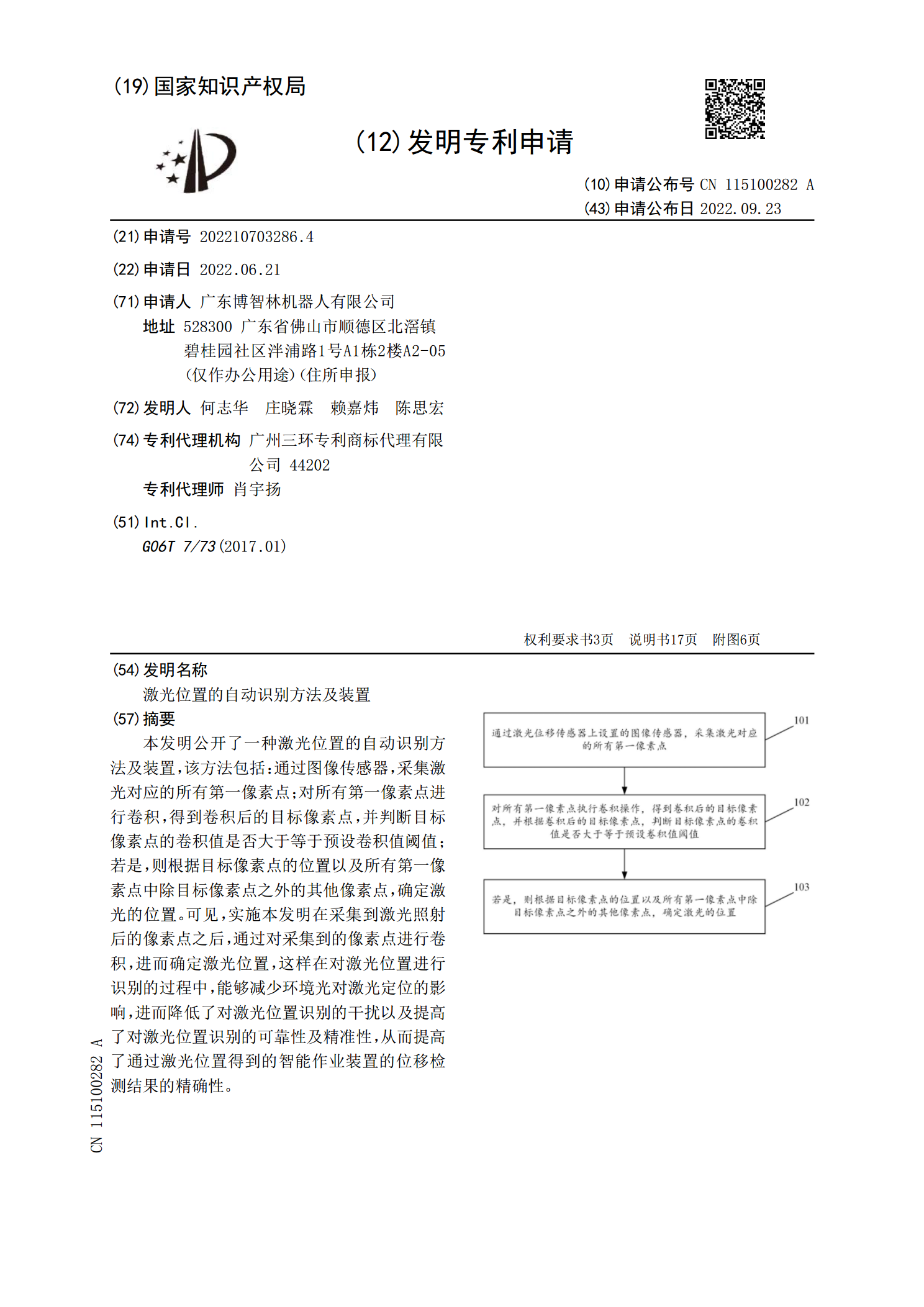
激光位置的自动识别方法及装置.pdf
本发明公开了一种激光位置的自动识别方法及装置,该方法包括:通过图像传感器,采集激光对应的所有第一像素点;对所有第一像素点进行卷积,得到卷积后的目标像素点,并判断目标像素点的卷积值是否大于等于预设卷积值阈值;若是,则根据目标像素点的位置以及所有第一像素点中除目标像素点之外的其他像素点,确定激光的位置。可见,实施本发明在采集到激光照射后的像素点之后,通过对采集到的像素点进行卷积,进而确定激光位置,这样在对激光位置进行识别的过程中,能够减少环境光对激光定位的影响,进而降低了对激光位置识别的干扰以及提高了对激光位
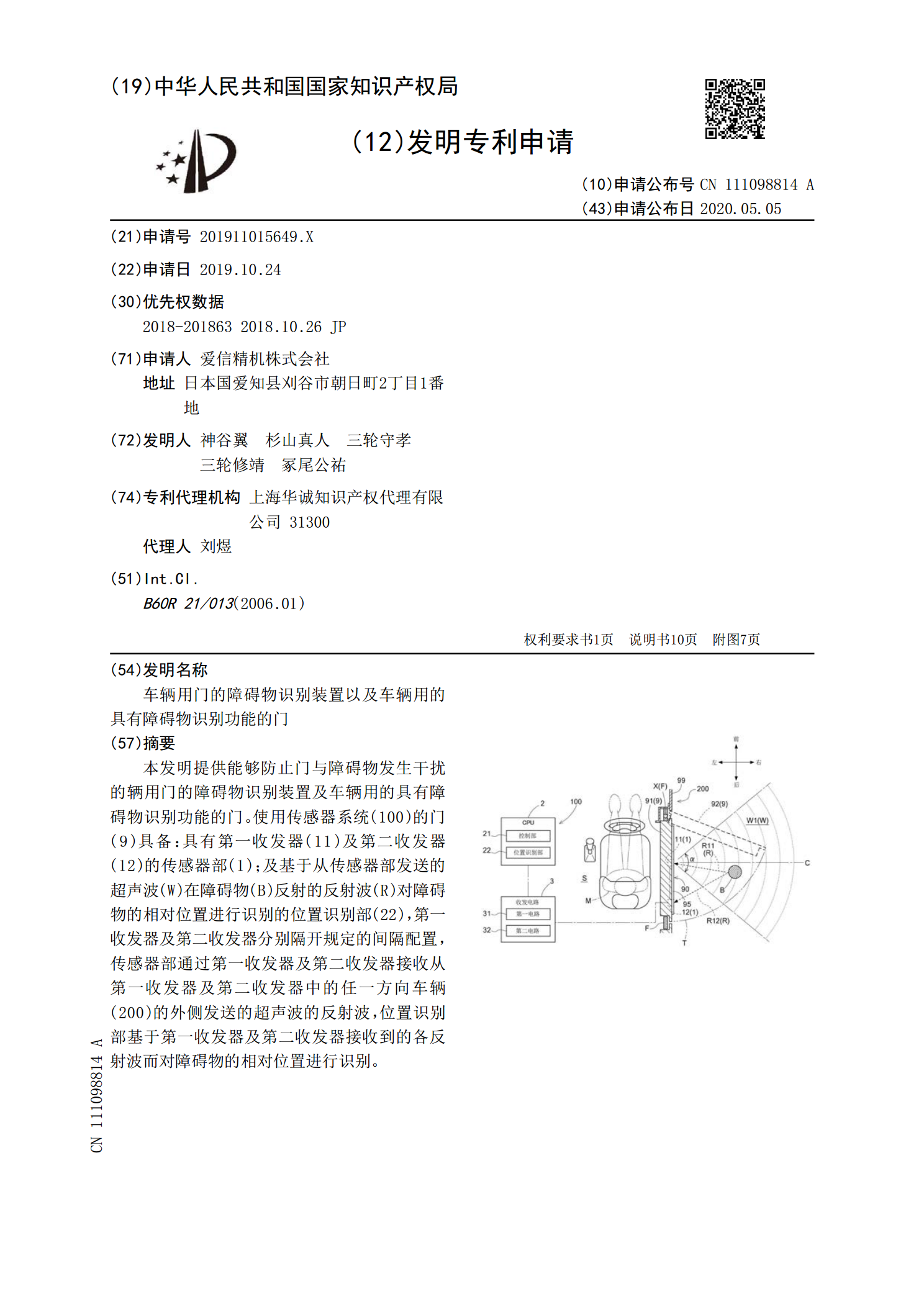
车辆用门的障碍物识别装置以及车辆用的具有障碍物识别功能的门.pdf
本发明提供能够防止门与障碍物发生干扰的辆用门的障碍物识别装置及车辆用的具有障碍物识别功能的门。使用传感器系统(100)的门(9)具备:具有第一收发器(11)及第二收发器(12)的传感器部(1);及基于从传感器部发送的超声波(W)在障碍物(B)反射的反射波(R)对障碍物的相对位置进行识别的位置识别部(22),第一收发器及第二收发器分别隔开规定的间隔配置,传感器部通过第一收发器及第二收发器接收从第一收发器及第二收发器中的任一方向车辆(200)的外侧发送的超声波的反射波,位置识别部基于第一收发器及第二收发器接收
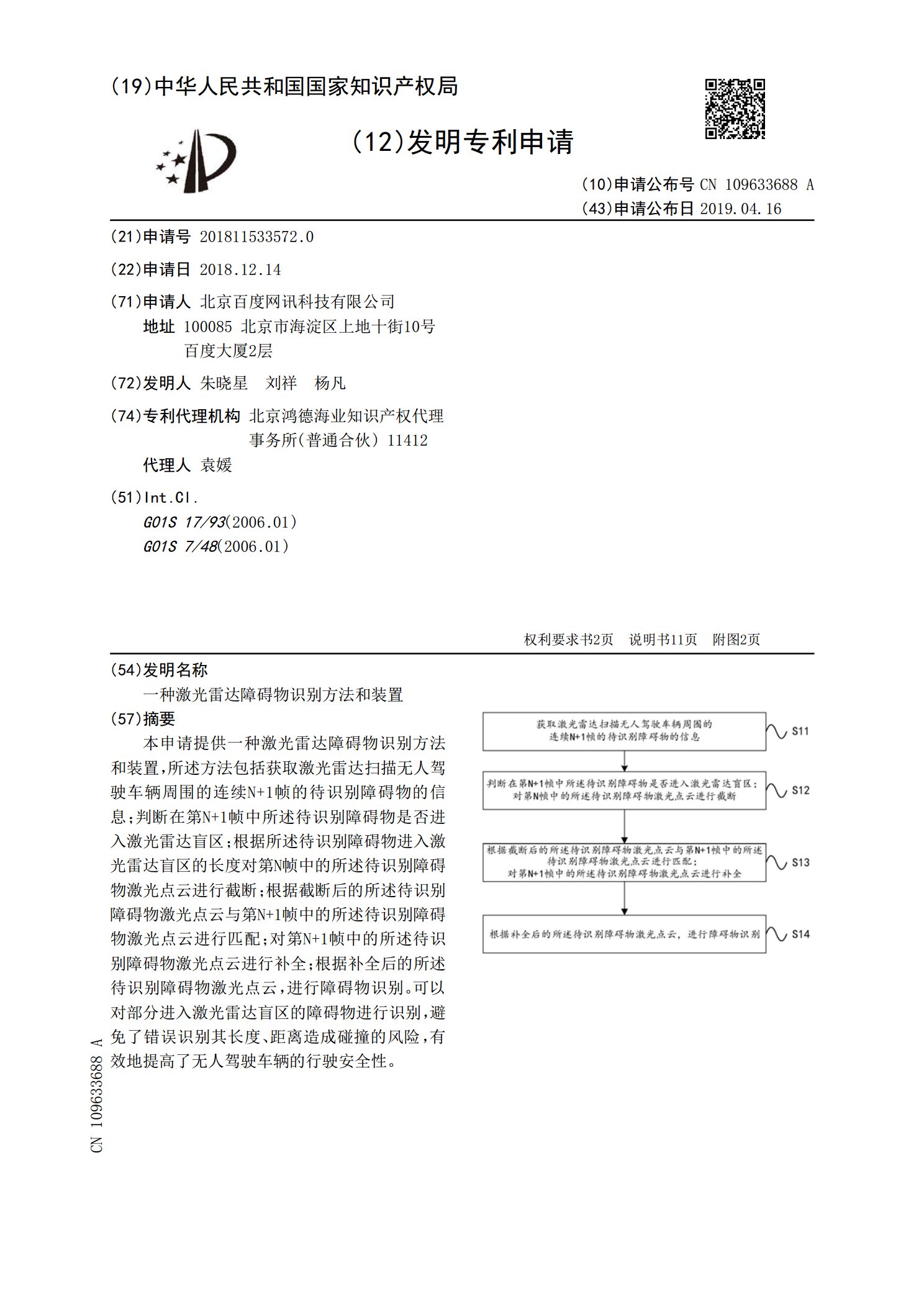
一种激光雷达障碍物识别方法和装置.pdf
本申请提供一种激光雷达障碍物识别方法和装置,所述方法包括获取激光雷达扫描无人驾驶车辆周围的连续N+1帧的待识别障碍物的信息;判断在第N+1帧中所述待识别障碍物是否进入激光雷达盲区;根据所述待识别障碍物进入激光雷达盲区的长度对第N帧中的所述待识别障碍物激光点云进行截断;根据截断后的所述待识别障碍物激光点云与第N+1帧中的所述待识别障碍物激光点云进行匹配;对第N+1帧中的所述待识别障碍物激光点云进行补全;根据补全后的所述待识别障碍物激光点云,进行障碍物识别。可以对部分进入激光雷达盲区的障碍物进行识别,避免了错