
一种激光雷达障碍物识别方法和装置.pdf

是雁****找我

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光雷达障碍物识别方法和装置.pdf
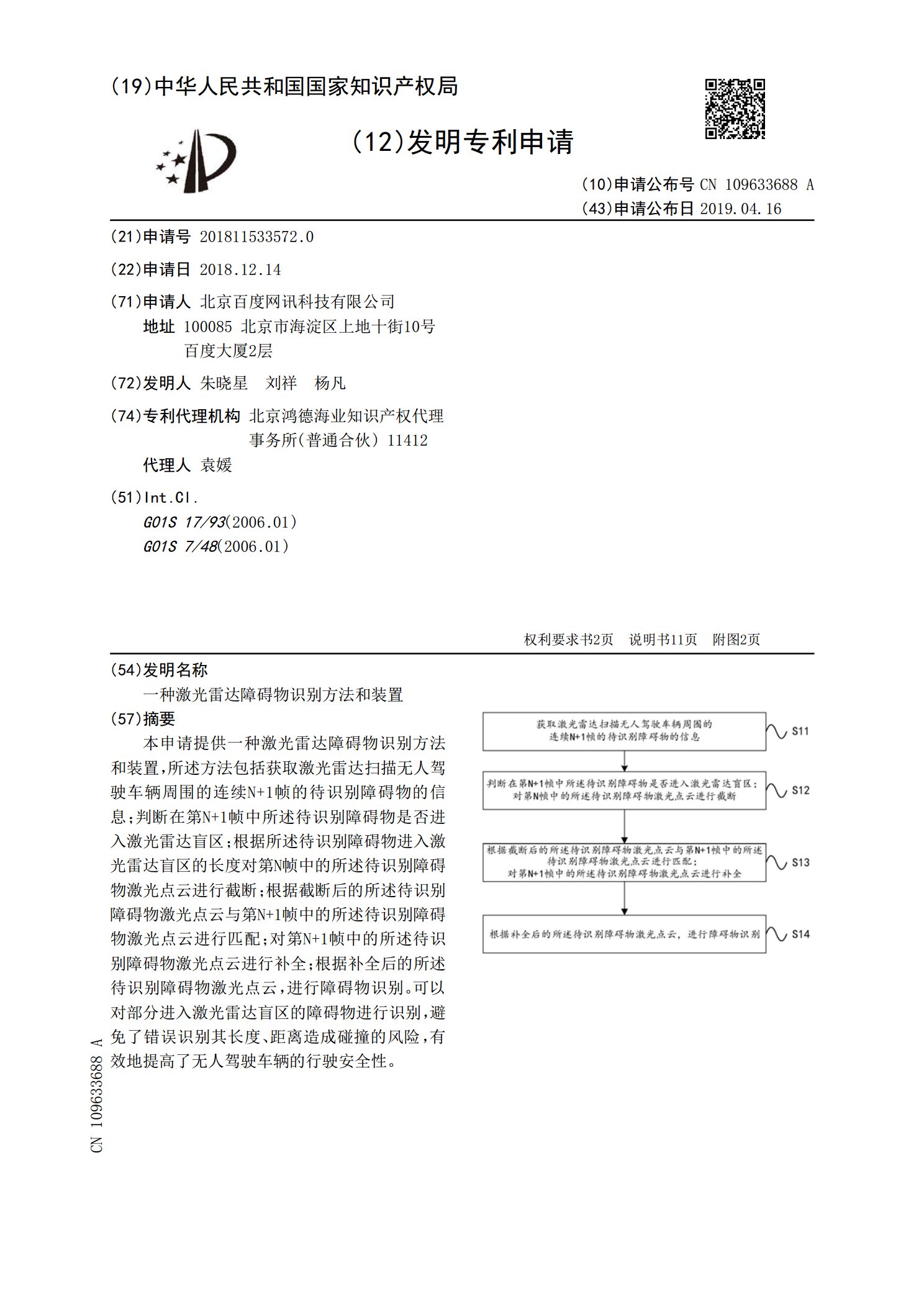
本申请提供一种激光雷达障碍物识别方法和装置,所述方法包括获取激光雷达扫描无人驾驶车辆周围的连续N+1帧的待识别障碍物的信息;判断在第N+1帧中所述待识别障碍物是否进入激光雷达盲区;根据所述待识别障碍物进入激光雷达盲区的长度对第N帧中的所述待识别障碍物激光点云进行截断;根据截断后的所述待识别障碍物激光点云与第N+1帧中的所述待识别障碍物激光点云进行匹配;对第N+1帧中的所述待识别障碍物激光点云进行补全;根据补全后的所述待识别障碍物激光点云,进行障碍物识别。可以对部分进入激光雷达盲区的障碍物进行识别,避免了错
障碍物识别方法和装置以及驾驶方法和装置.pdf
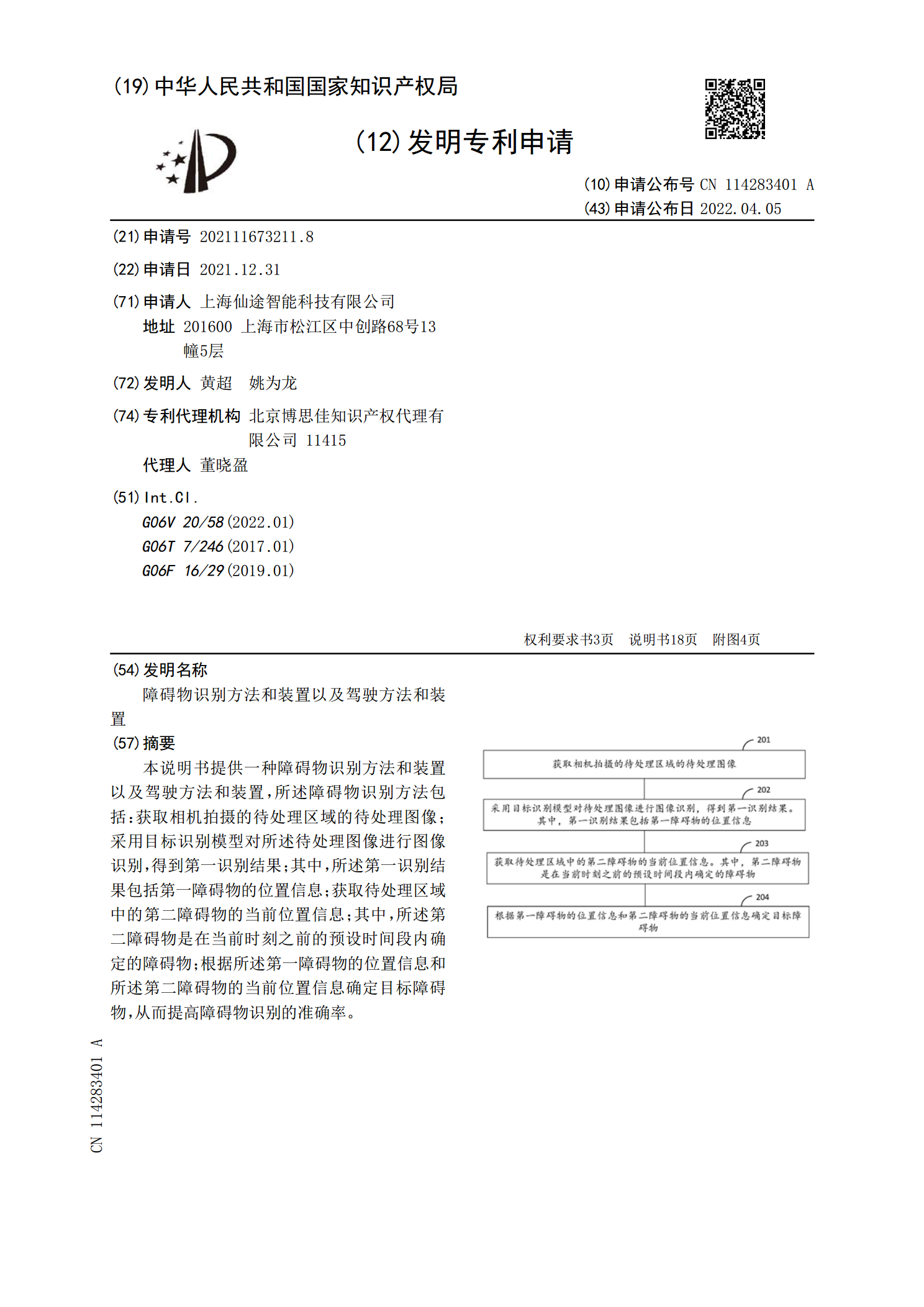
本说明书提供一种障碍物识别方法和装置以及驾驶方法和装置,所述障碍物识别方法包括:获取相机拍摄的待处理区域的待处理图像;采用目标识别模型对所述待处理图像进行图像识别,得到第一识别结果;其中,所述第一识别结果包括第一障碍物的位置信息;获取待处理区域中的第二障碍物的当前位置信息;其中,所述第二障碍物是在当前时刻之前的预设时间段内确定的障碍物;根据所述第一障碍物的位置信息和所述第二障碍物的当前位置信息确定目标障碍物,从而提高障碍物识别的准确率。

基于激光雷达的障碍物识别方法、地图创建方法及装置.pdf
本发明涉及智能车辆的环境感知技术领域,特别是基于激光雷达的障碍物识别方法、地图创建方法及装置。根据获取的当前车辆行驶的车道信息,得到车辆左侧第一距离和车辆右侧第二距离;解析激光雷达检测的障碍物信息,得到点云数据距离车辆的横向距离;剔除横向距离超出车辆左侧第一距离和车辆右侧第二距离的信息,对剩余障碍物信息进行聚类并提取轮廓点,并利用障碍物轮廓点信息更新栅格地图;减少数据处理量和资源占用,提高处理效率,剔除了除轮廓点以外的点,减少数据处理量,解决了激光雷达数据量较大导致的处理资源占用大、处理效率较低的问题,解

激光雷达的船舶航行障碍物识别方法.docx
激光雷达的船舶航行障碍物识别方法标题:激光雷达在船舶航行障碍物识别中的应用与方法分析摘要:船舶航行障碍物识别是保障船舶安全航行的关键技术之一。近年来,激光雷达作为一种高精度、高分辨率的传感器技术,被广泛应用于船舶航行障碍物识别领域。本文基于激光雷达在船舶航行障碍物识别中的应用和方法分析,详细介绍了激光雷达的工作原理和船舶航行障碍物识别方法,并对目前存在的问题进行了分析和展望。关键词:激光雷达;船舶航行;障碍物识别;高精度;高分辨率一、引言船舶航行障碍物识别是保障船舶安全航行的重要技术之一。障碍物识别的准确
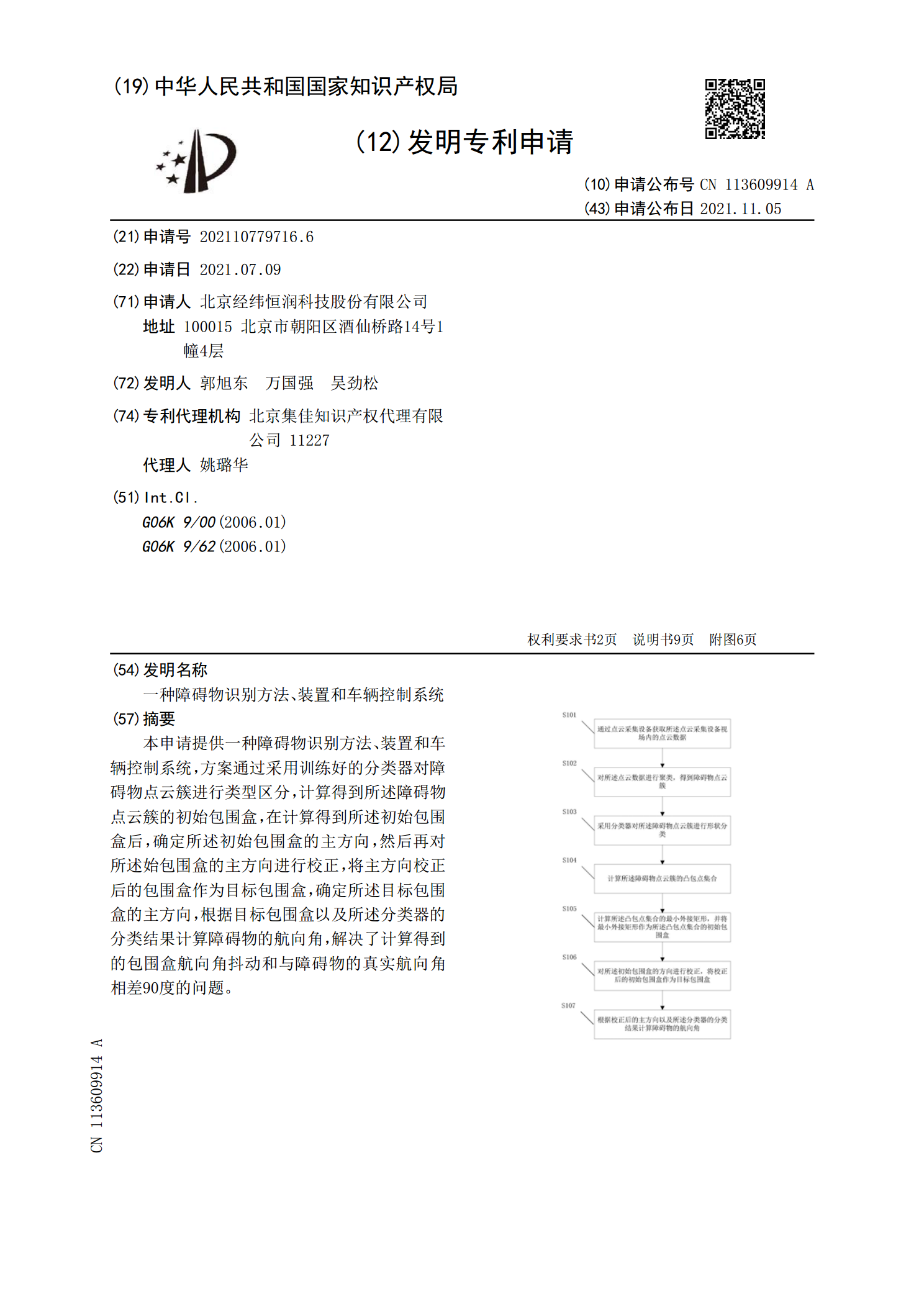
一种障碍物识别方法、装置和车辆控制系统.pdf
本申请提供一种障碍物识别方法、装置和车辆控制系统,方案通过采用训练好的分类器对障碍物点云簇进行类型区分,计算得到所述障碍物点云簇的初始包围盒,在计算得到所述初始包围盒后,确定所述初始包围盒的主方向,然后再对所述始包围盒的主方向进行校正,将主方向校正后的包围盒作为目标包围盒,确定所述目标包围盒的主方向,根据目标包围盒以及所述分类器的分类结果计算障碍物的航向角,解决了计算得到的包围盒航向角抖动和与障碍物的真实航向角相差90度的问题。