
一种电动两轮车的辅助驻车系统及其辅助方法.pdf

静芙****可爱

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电动两轮车的辅助驻车系统及其辅助方法.pdf
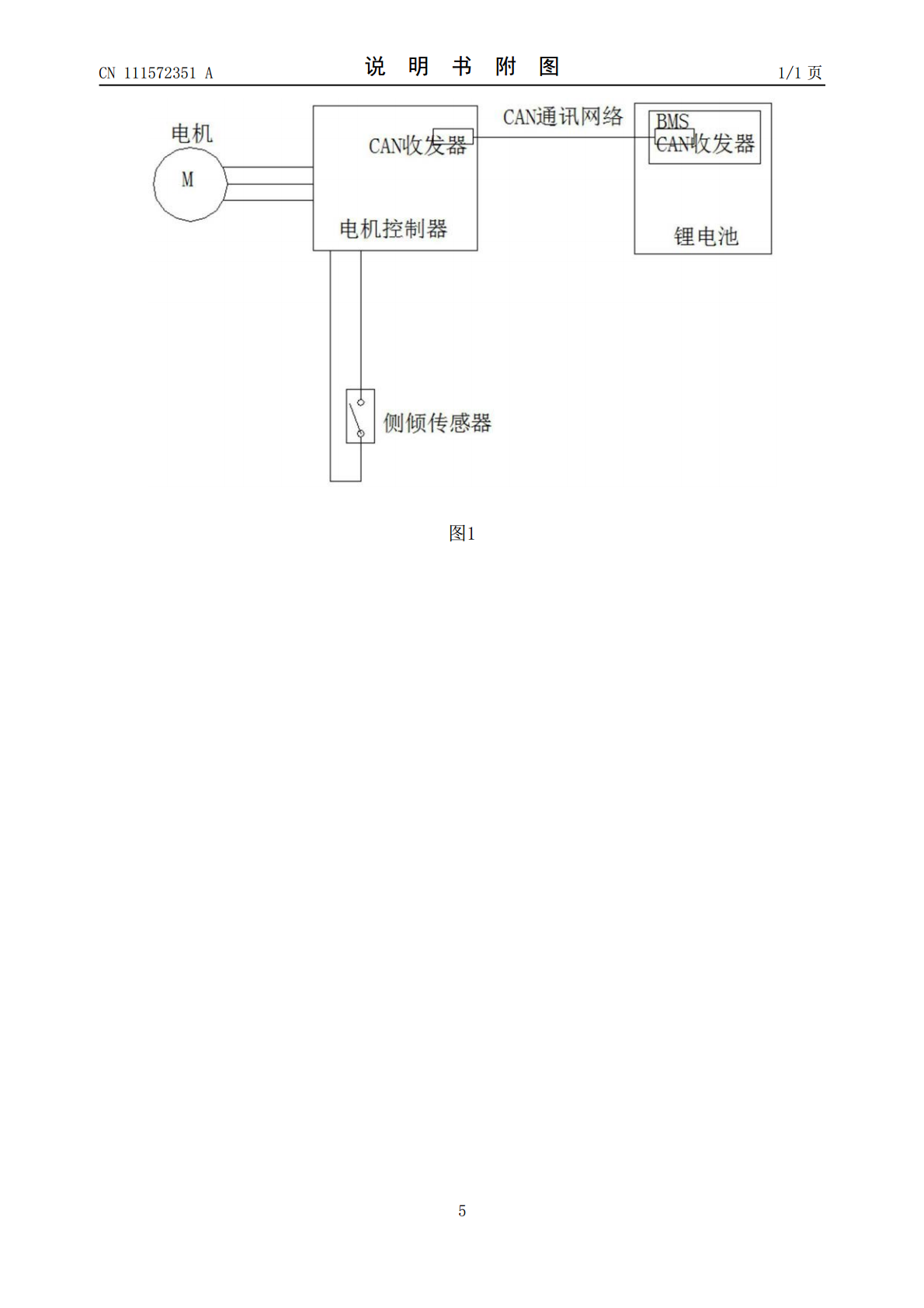
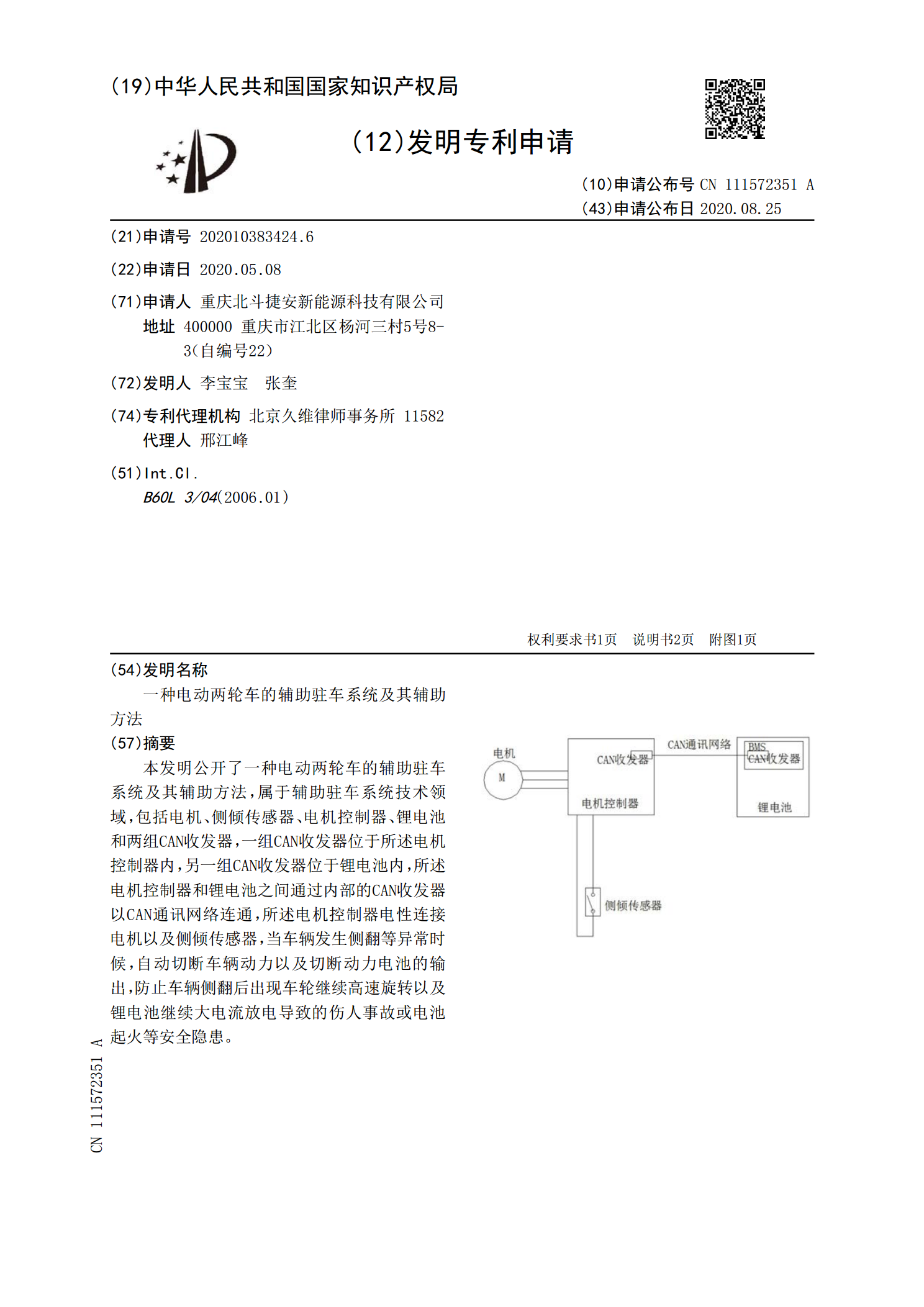
本发明公开了一种电动两轮车的辅助驻车系统及其辅助方法,属于辅助驻车系统技术领域,包括电机、侧倾传感器、电机控制器、锂电池和两组CAN收发器,一组CAN收发器位于所述电机控制器内,另一组CAN收发器位于锂电池内,所述电机控制器和锂电池之间通过内部的CAN收发器以CAN通讯网络连通,所述电机控制器电性连接电机以及侧倾传感器,当车辆发生侧翻等异常时候,自动切断车辆动力以及切断动力电池的输出,防止车辆侧翻后出现车轮继续高速旋转以及锂电池继续大电流放电导致的伤人事故或电池起火等安全隐患。
物流两轮车电动升降辅助支撑.pdf
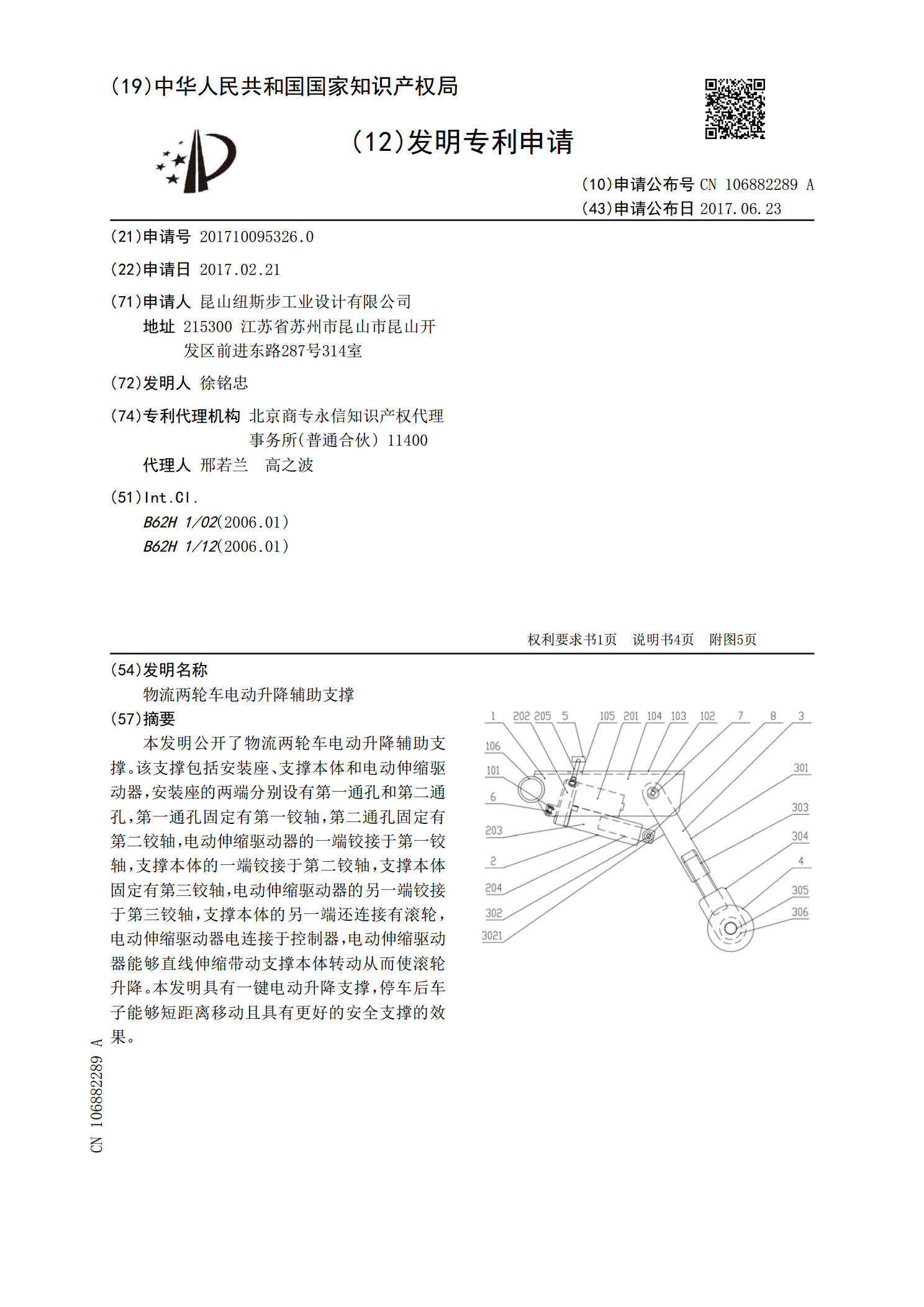
本发明公开了物流两轮车电动升降辅助支撑。该支撑包括安装座、支撑本体和电动伸缩驱动器,安装座的两端分别设有第一通孔和第二通孔,第一通孔固定有第一铰轴,第二通孔固定有第二铰轴,电动伸缩驱动器的一端铰接于第一铰轴,支撑本体的一端铰接于第二铰轴,支撑本体固定有第三铰轴,电动伸缩驱动器的另一端铰接于第三铰轴,支撑本体的另一端还连接有滚轮,电动伸缩驱动器电连接于控制器,电动伸缩驱动器能够直线伸缩带动支撑本体转动从而使滚轮升降。本发明具有一键电动升降支撑,停车后车子能够短距离移动且具有更好的安全支撑的效果。
用于辅助换出驻车挡的车辆驻车系统及方法.pdf
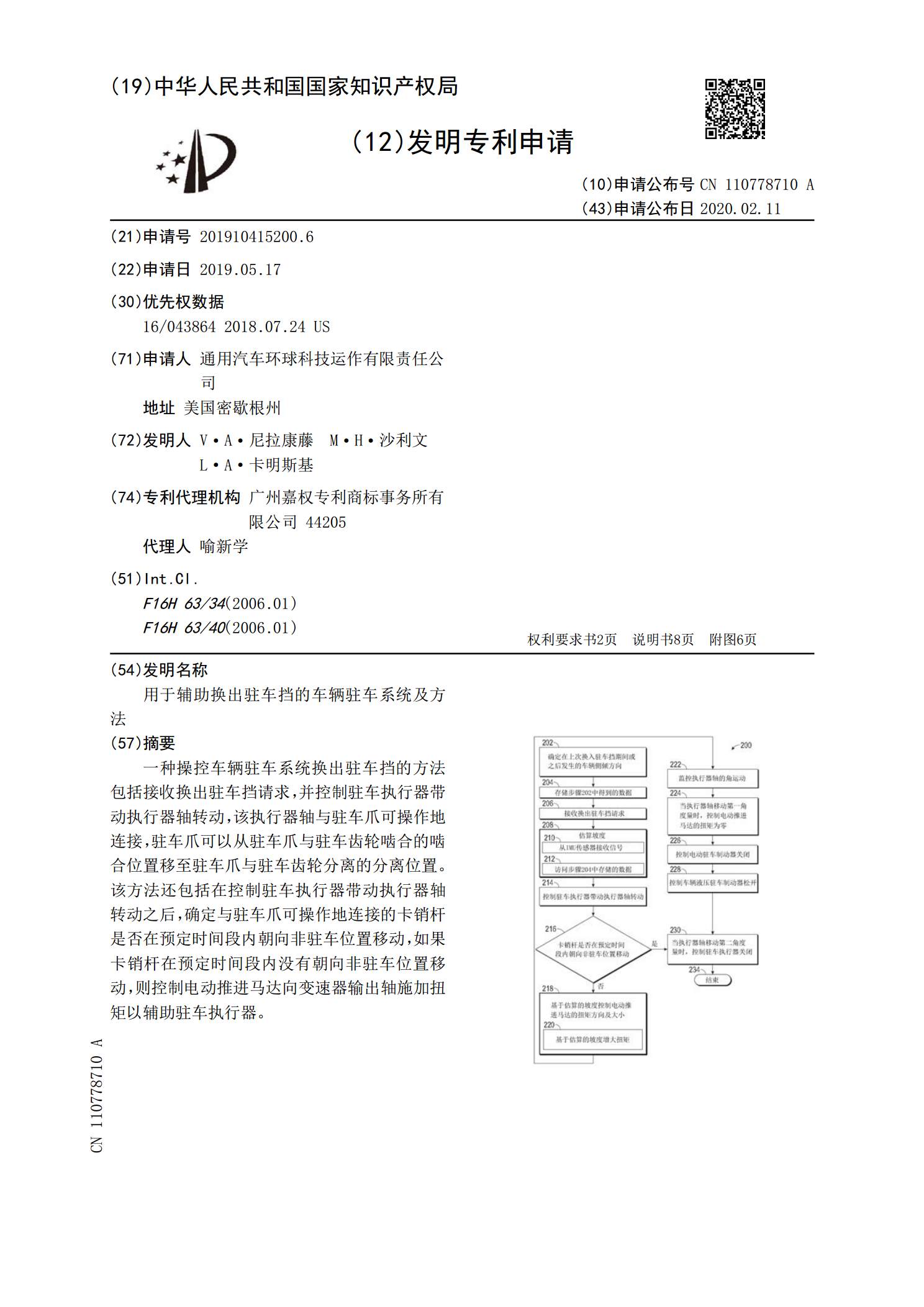
一种操控车辆驻车系统换出驻车挡的方法包括接收换出驻车挡请求,并控制驻车执行器带动执行器轴转动,该执行器轴与驻车爪可操作地连接,驻车爪可以从驻车爪与驻车齿轮啮合的啮合位置移至驻车爪与驻车齿轮分离的分离位置。该方法还包括在控制驻车执行器带动执行器轴转动之后,确定与驻车爪可操作地连接的卡销杆是否在预定时间段内朝向非驻车位置移动,如果卡销杆在预定时间段内没有朝向非驻车位置移动,则控制电动推进马达向变速器输出轴施加扭矩以辅助驻车执行器。
辅助驻车自动控制方法及系统.pdf
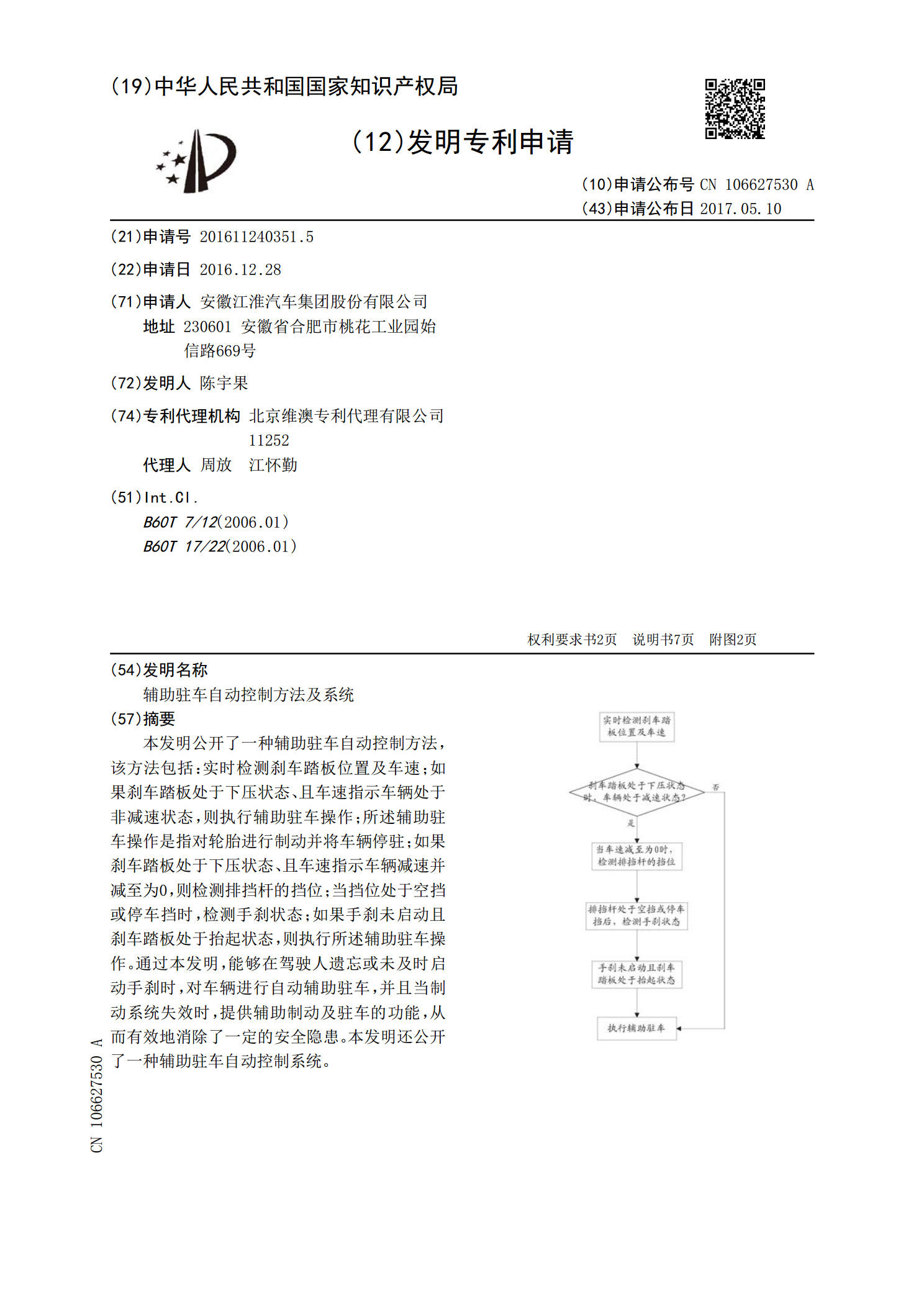
本发明公开了一种辅助驻车自动控制方法,该方法包括:实时检测刹车踏板位置及车速;如果刹车踏板处于下压状态、且车速指示车辆处于非减速状态,则执行辅助驻车操作;所述辅助驻车操作是指对轮胎进行制动并将车辆停驻;如果刹车踏板处于下压状态、且车速指示车辆减速并减至为0,则检测排挡杆的挡位;当挡位处于空挡或停车挡时,检测手刹状态;如果手刹未启动且刹车踏板处于抬起状态,则执行所述辅助驻车操作。通过本发明,能够在驾驶人遗忘或未及时启动手刹时,对车辆进行自动辅助驻车,并且当制动系统失效时,提供辅助制动及驻车的功能,从而有效地

坡道驻车辅助.pdf
公开一种坡道驻车辅助。一种车辆包括驻车辅助系统,所述驻车辅助系统识别车辆的倾斜度和车轮相对于车辆的中心线的角度。所述车辆还包括控制器,所述控制器响应于激活车辆、所述倾斜度超过第一阈值以及所述角度超过第二阈值,调整所述角度使得车轮相对于所述中心线回正。