
一种越障型智能巡检机器人及其控制系统.pdf

论文****可爱

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种越障型智能巡检机器人及其控制系统.pdf
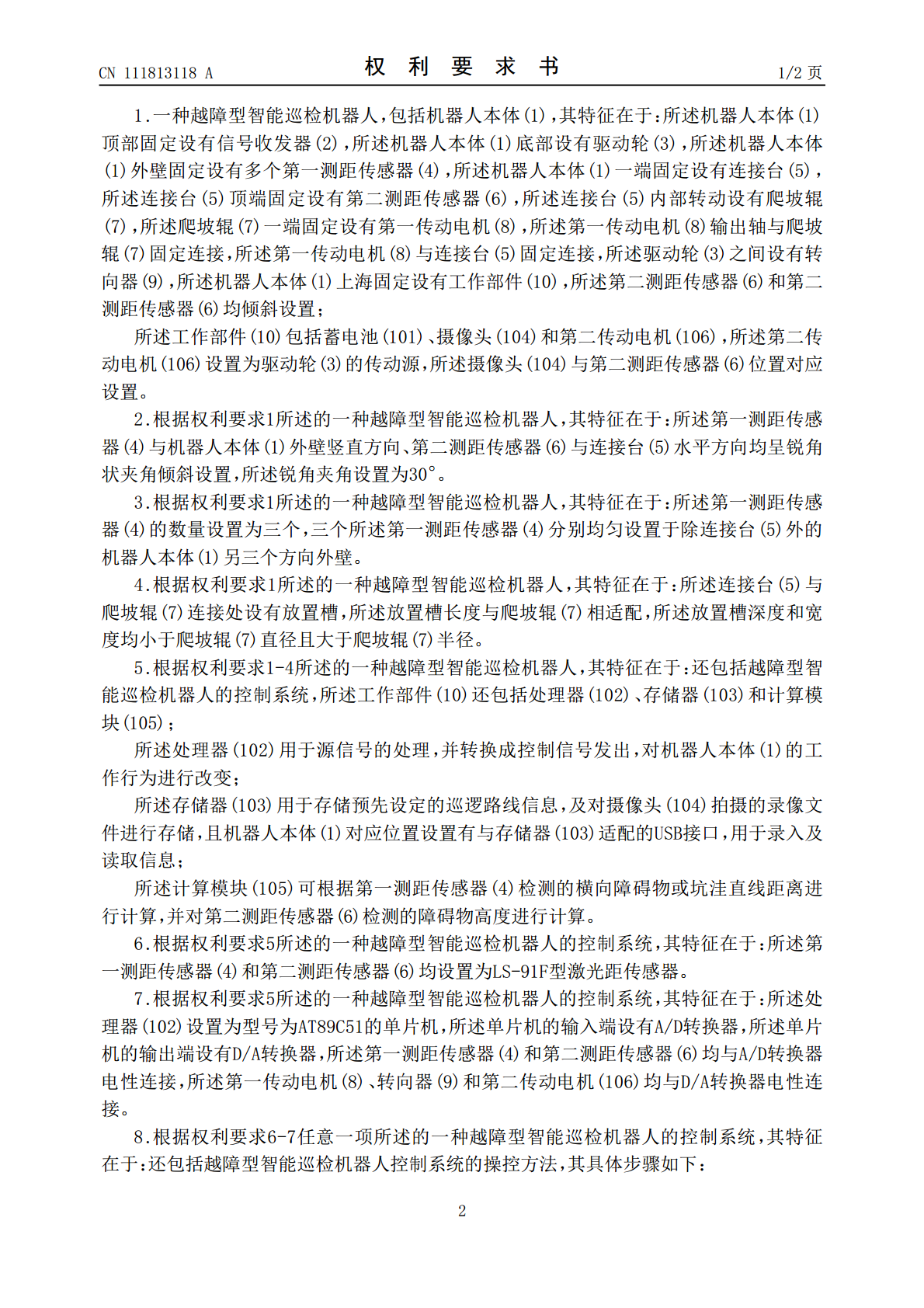
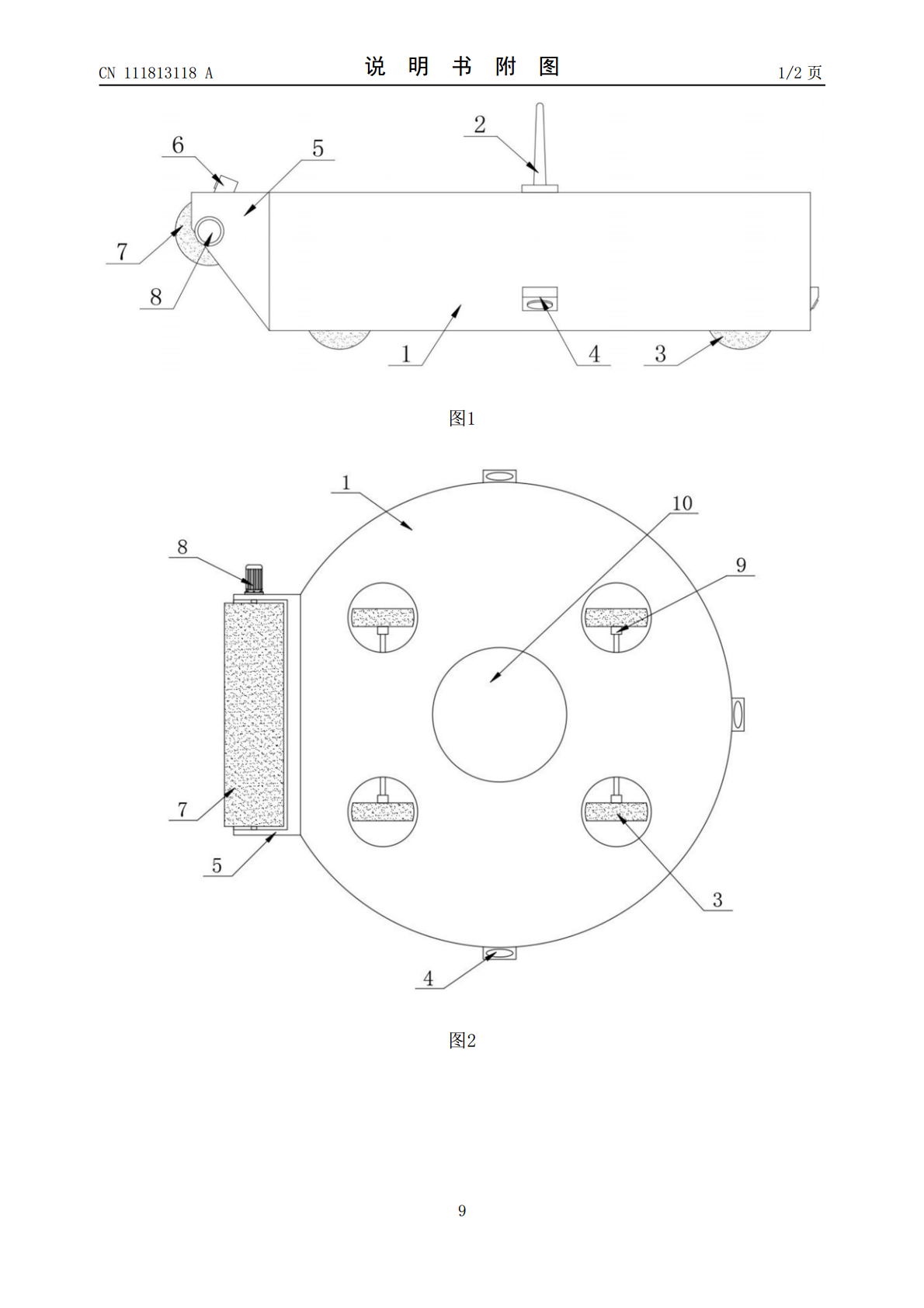
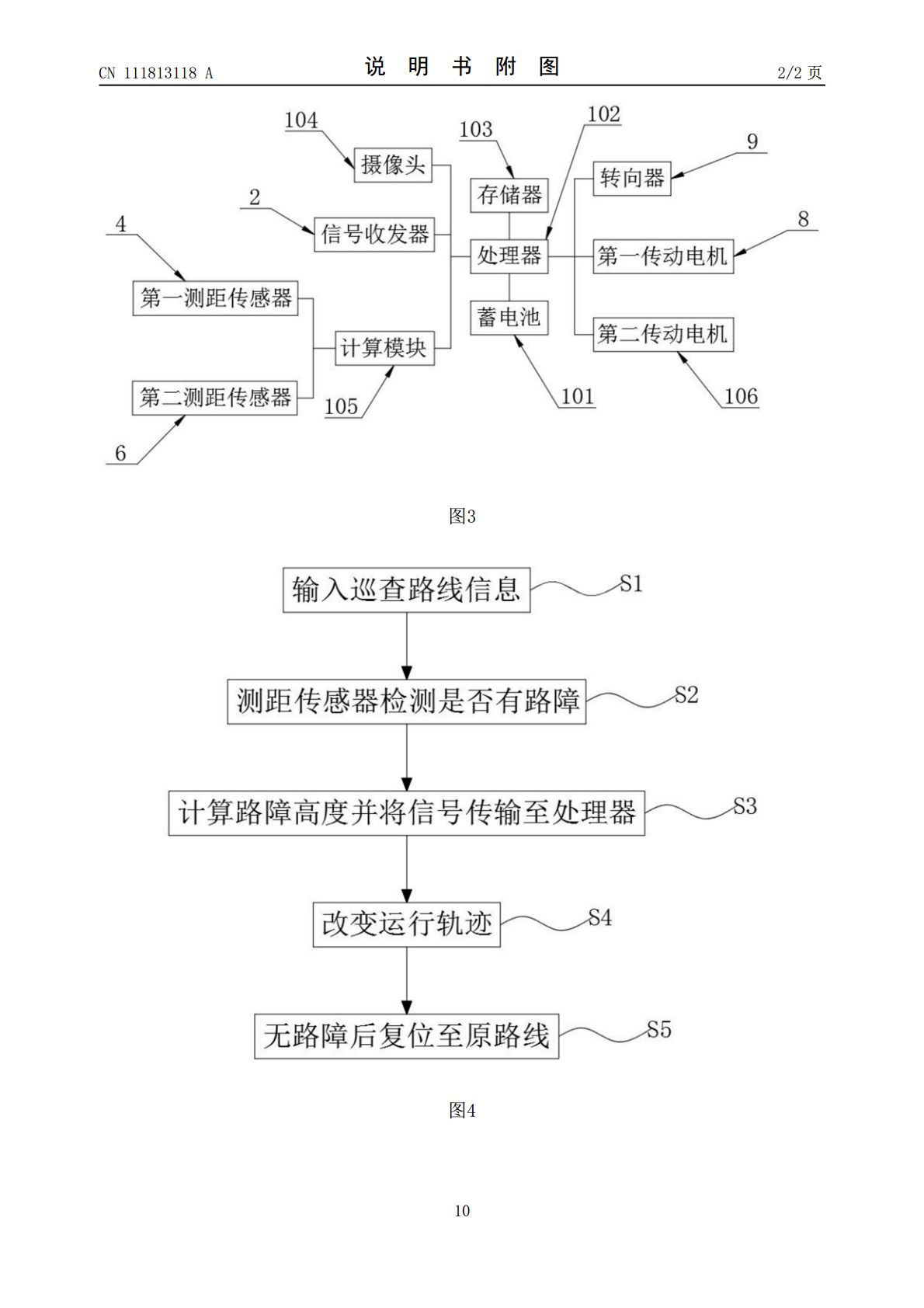
本发明公开了一种越障型智能巡检机器人及其控制系统,具体涉及电子信息领域,包括机器人本体,所述机器人本体顶部固定设有信号收发器,所述机器人本体底部设有驱动轮,所述机器人本体外壁固定设有多个第一测距传感器,所述机器人本体一端固定设有连接台,所述连接台顶端固定设有第二测距传感器。本发明通过计算模块对第二测距传感器检测数据的计算,第二测距传感器对前进路线上的障碍物进行检测,并将检测信息传输至计算模块,并运用勾股定律计算障碍物高度是否为越过值,从而由处理器控制第一传动电机工作带动爬坡辊转动,爬坡辊率先与障碍物接触,
一种无轨越障智能巡检机器人.pdf
本发明涉及一种无轨越障智能巡检机器人,包括越障传动装置、巡检机器人主体和固定设置于所述巡检机器人主体上的控制器、红外传感器、红外摄像机、视频采集装置、水平检测装置和无线收发装置,其中,所述越障传动装置的左右车轮均由两个着地轮和一个悬空轮组成,可实现越障,所述红外传感器、红外摄像机、视频采集装置、水平检测装置和无线收发装置均与控制器连接,控制器通过无线收发装置与远端控制室连接。本发明提供的无轨越障智能巡检机器人结构简单,设计灵活,能够适应多种环境,尤其是坑洼不平路面。
具有越障功能的智能巡检机器人.pdf
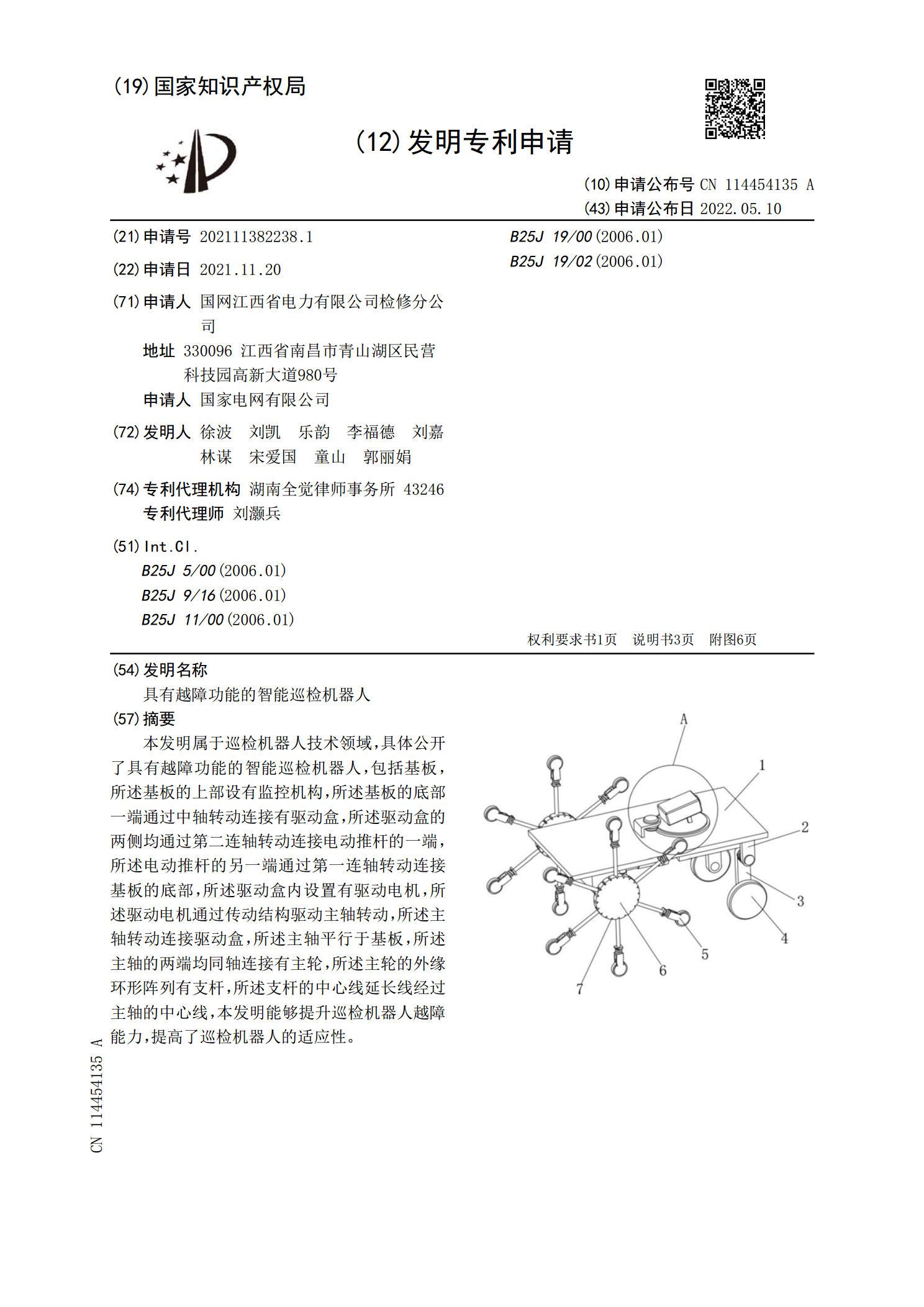
本发明属于巡检机器人技术领域,具体公开了具有越障功能的智能巡检机器人,包括基板,所述基板的上部设有监控机构,所述基板的底部一端通过中轴转动连接有驱动盒,所述驱动盒的两侧均通过第二连轴转动连接电动推杆的一端,所述电动推杆的另一端通过第一连轴转动连接基板的底部,所述驱动盒内设置有驱动电机,所述驱动电机通过传动结构驱动主轴转动,所述主轴转动连接驱动盒,所述主轴平行于基板,所述主轴的两端均同轴连接有主轮,所述主轮的外缘环形阵列有支杆,所述支杆的中心线延长线经过主轴的中心线,本发明能够提升巡检机器人越障能力,提高了
一种智能农业巡检四足机器人及其控制系统.pdf
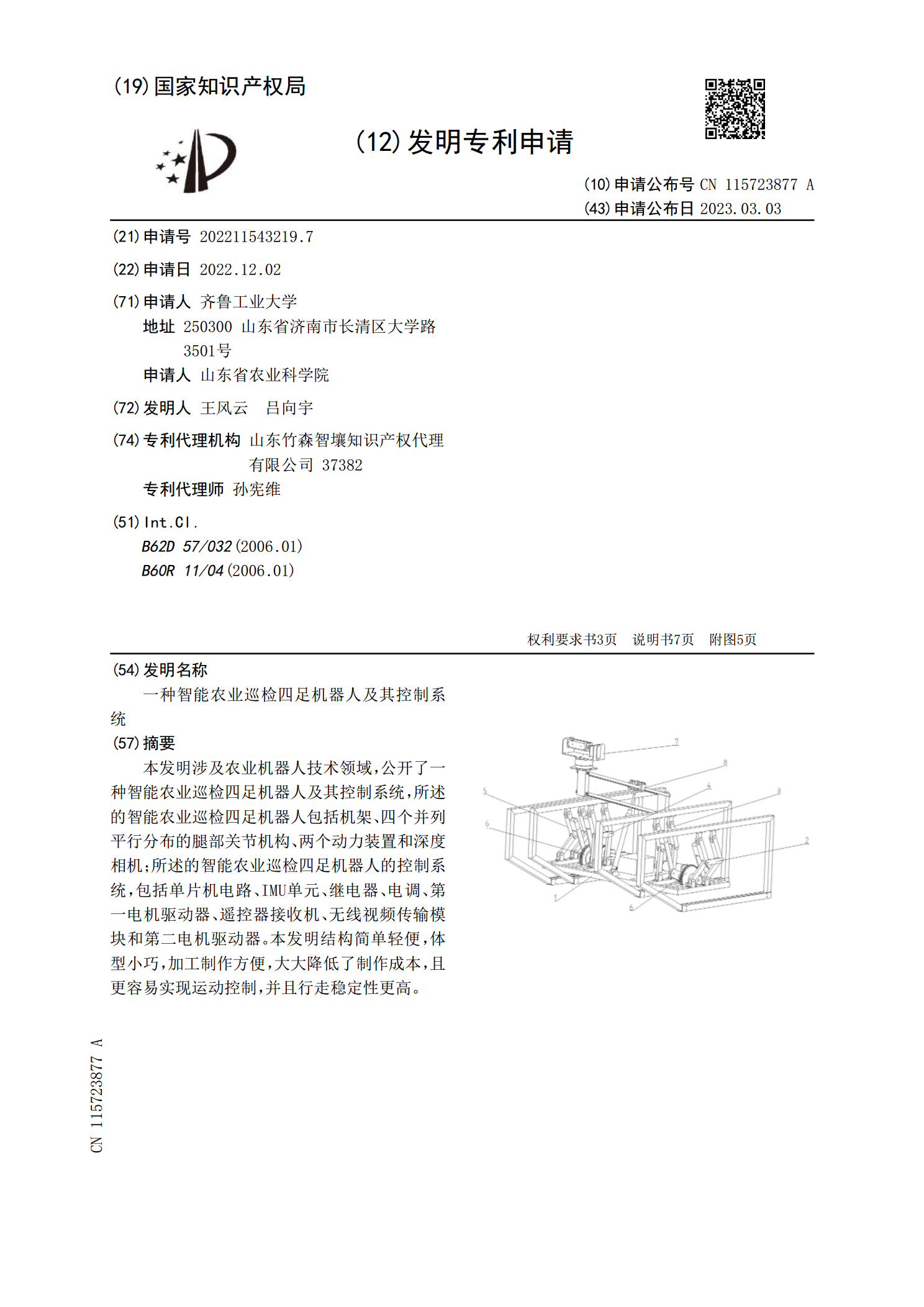
本发明涉及农业机器人技术领域,公开了一种智能农业巡检四足机器人及其控制系统,所述的智能农业巡检四足机器人包括机架、四个并列平行分布的腿部关节机构、两个动力装置和深度相机;所述的智能农业巡检四足机器人的控制系统,包括单片机电路、IMU单元、继电器、电调、第一电机驱动器、遥控器接收机、无线视频传输模块和第二电机驱动器。本发明结构简单轻便,体型小巧,加工制作方便,大大降低了制作成本,且更容易实现运动控制,并且行走稳定性更高。

越障巡检机器人.pdf
本发明公开了一种越障巡检机器人,包括车架,车架上设有至少3条悬挂臂,所述每条悬挂臂的上端分别设有滚动轮,每条悬挂臂与车架之间分别设有纵向移动装置、横向移动装置和升降装置,并分别由纵向驱动电机、横向驱动电机和升降驱动电机驱动,悬挂臂上设有光电传感器和接触传感器。每条悬挂臂可相对于车架单独上下、前后、左右移动,当遇到障碍物时,悬挂臂可单独进行三维移动,依次越过障碍物,进而使整个越障巡检机器人跨越障碍物。实现安全、平稳、可靠越障,对输电线路进行巡检。提高了检测效率,能够有效的保证电网安全运行。主要应用于超高压架