
一种悬吊式可移动刷墙机器人.pdf

一条****涛k

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种悬吊式可移动刷墙机器人.pdf
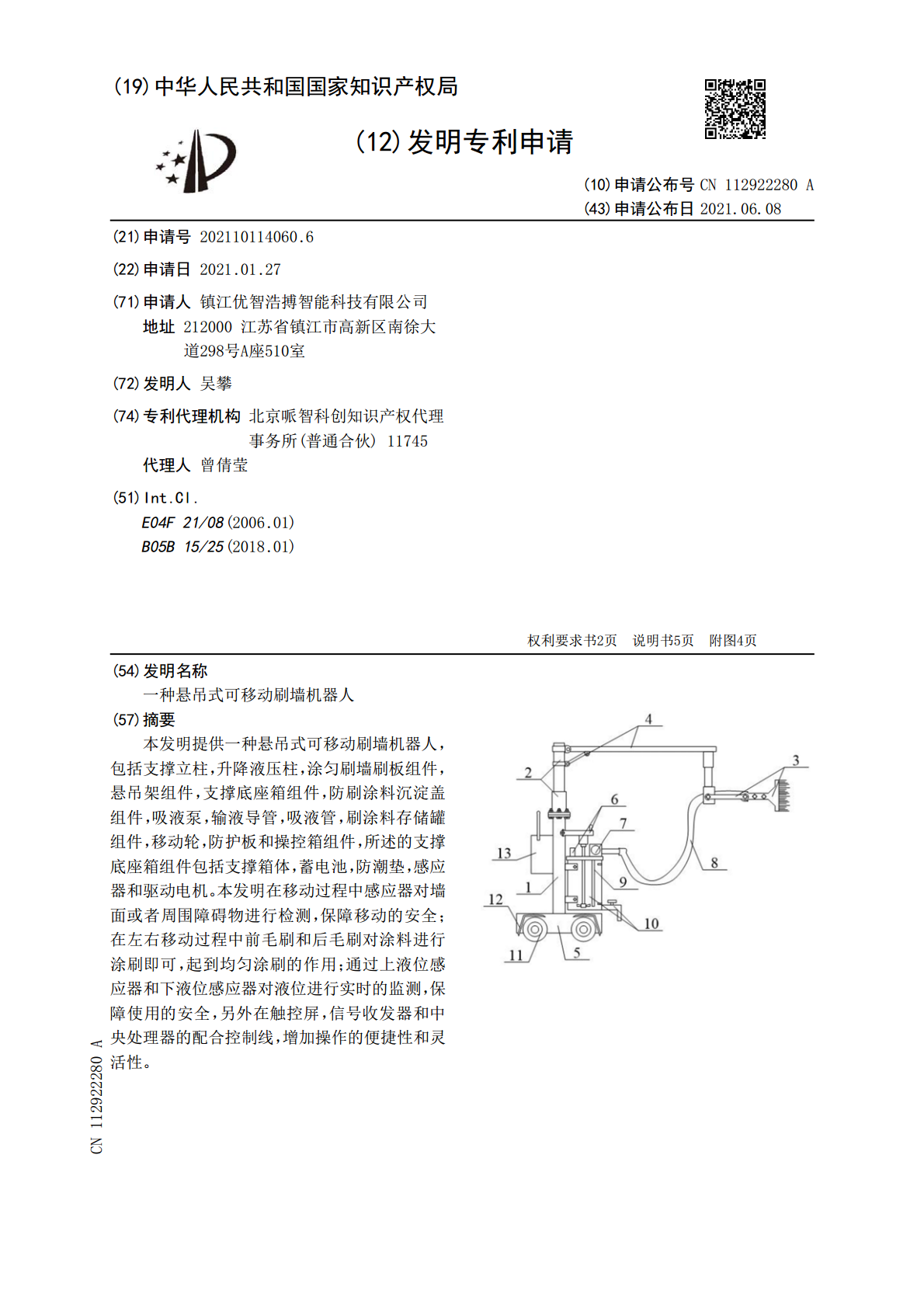
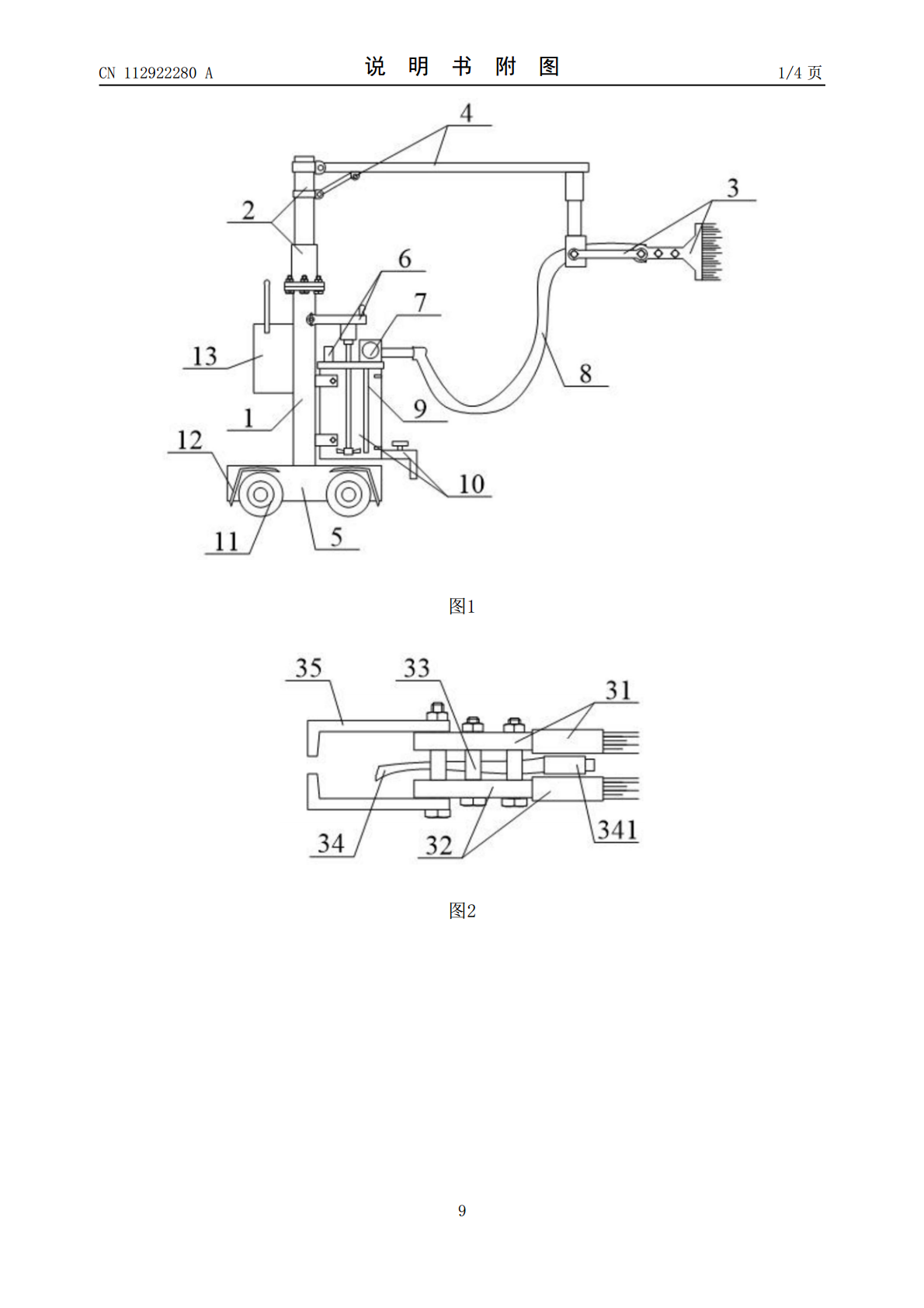
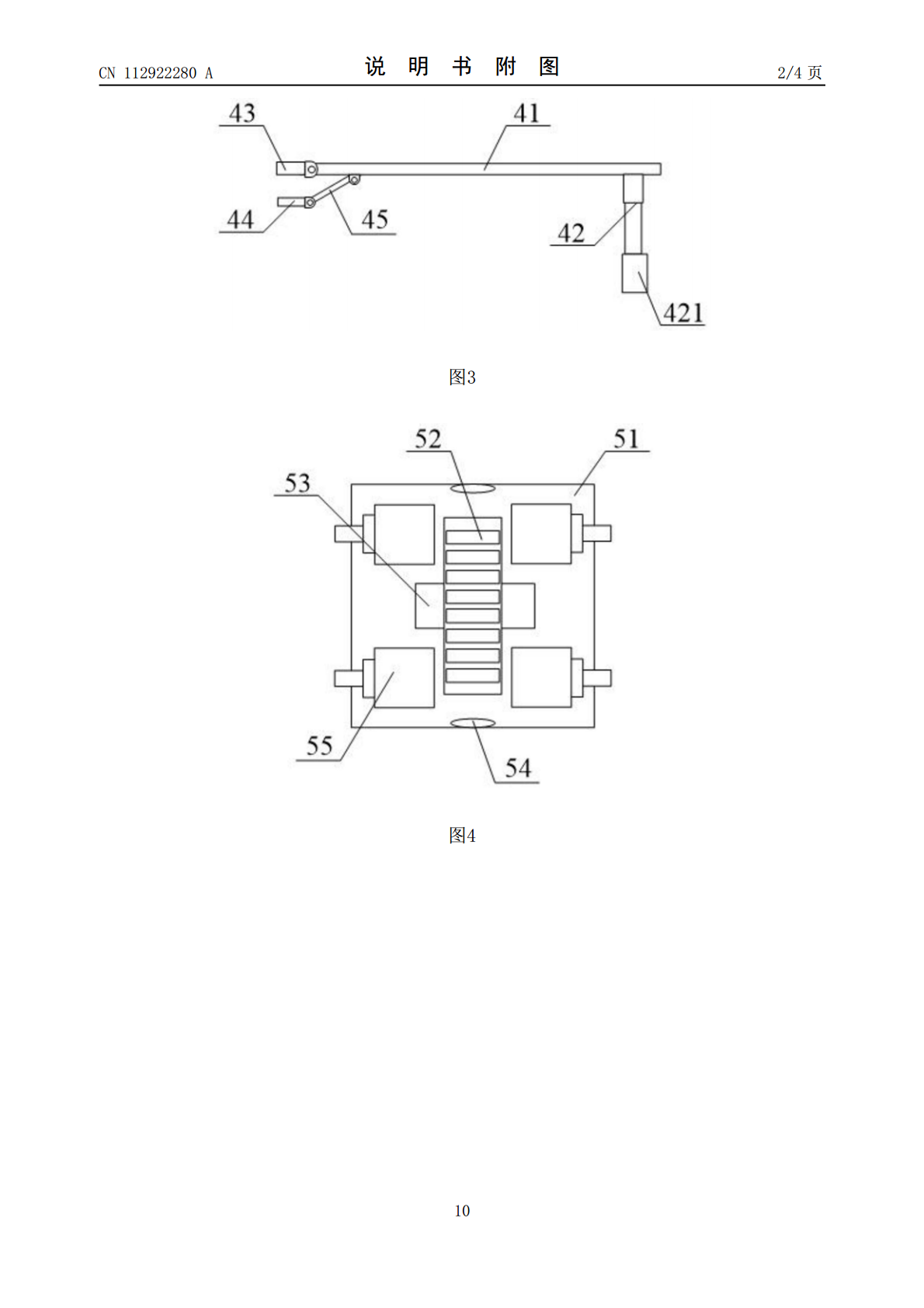
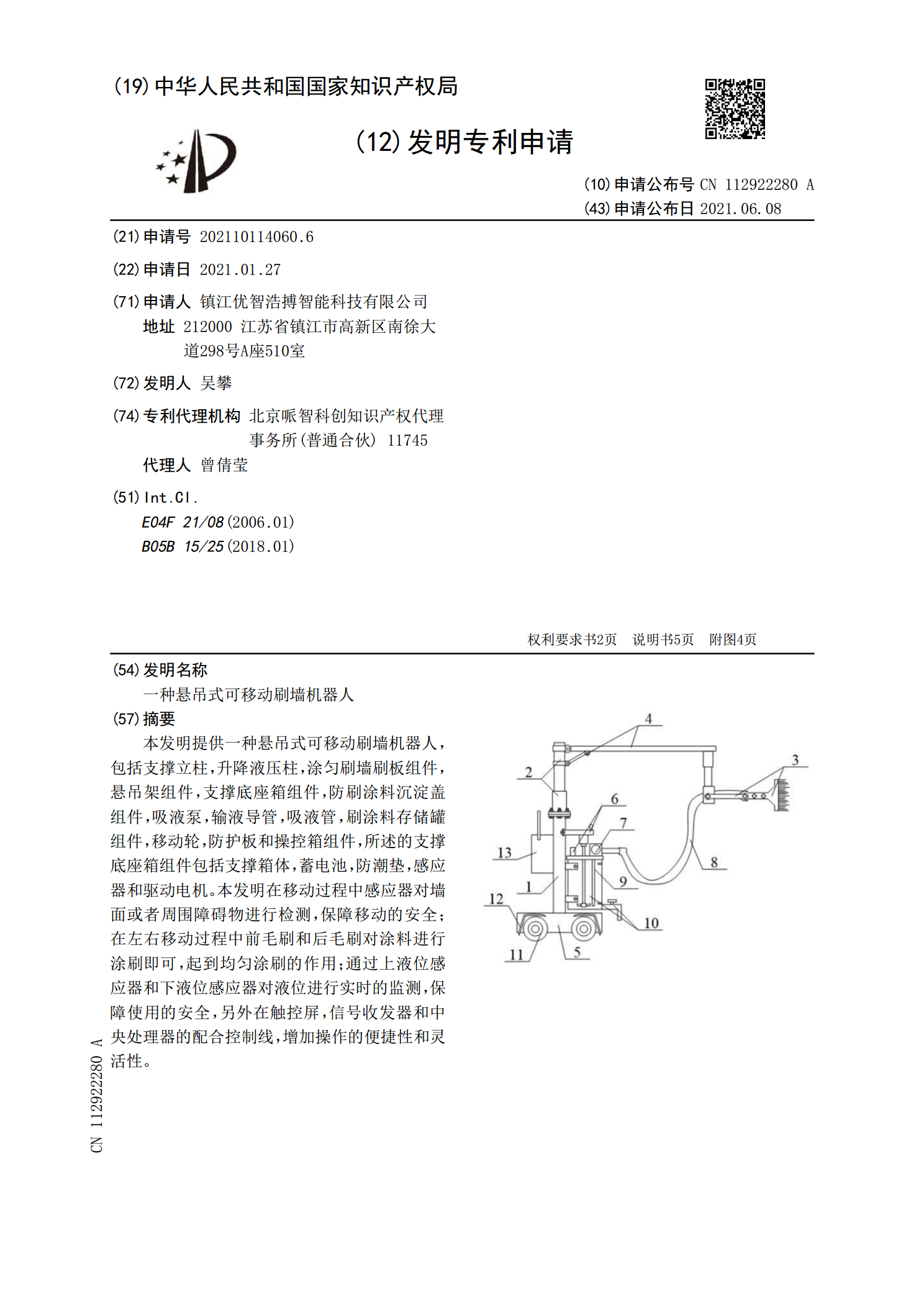
本发明提供一种悬吊式可移动刷墙机器人,包括支撑立柱,升降液压柱,涂匀刷墙刷板组件,悬吊架组件,支撑底座箱组件,防刷涂料沉淀盖组件,吸液泵,输液导管,吸液管,刷涂料存储罐组件,移动轮,防护板和操控箱组件,所述的支撑底座箱组件包括支撑箱体,蓄电池,防潮垫,感应器和驱动电机。本发明在移动过程中感应器对墙面或者周围障碍物进行检测,保障移动的安全;在左右移动过程中前毛刷和后毛刷对涂料进行涂刷即可,起到均匀涂刷的作用;通过上液位感应器和下液位感应器对液位进行实时的监测,保障使用的安全,另外在触控屏,信号收发器和中央处
一种可自动移动升降的刷墙用梯子.pdf
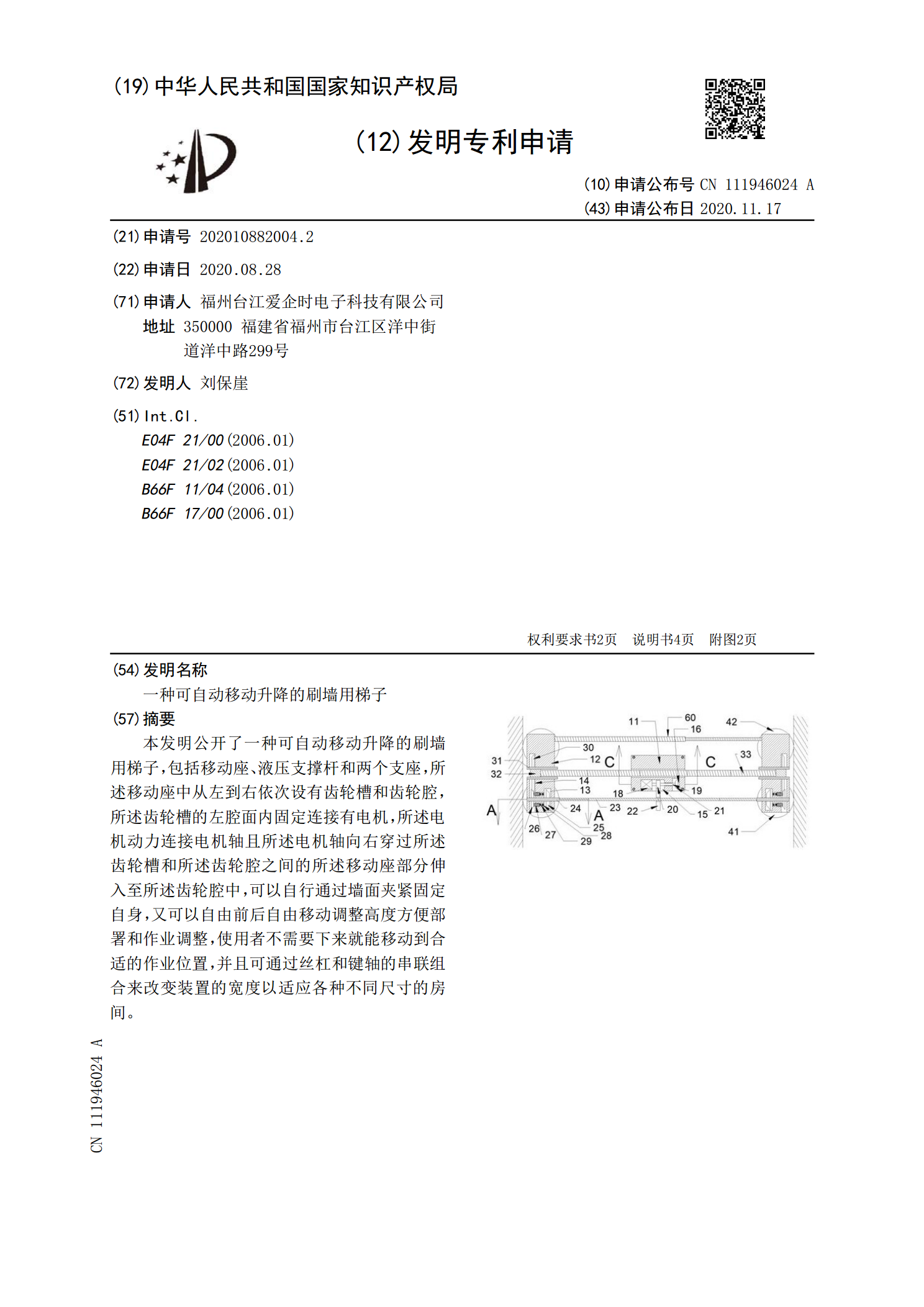
本发明公开了一种可自动移动升降的刷墙用梯子,包括移动座、液压支撑杆和两个支座,所述移动座中从左到右依次设有齿轮槽和齿轮腔,所述齿轮槽的左腔面内固定连接有电机,所述电机动力连接电机轴且所述电机轴向右穿过所述齿轮槽和所述齿轮腔之间的所述移动座部分伸入至所述齿轮腔中,可以自行通过墙面夹紧固定自身,又可以自由前后自由移动调整高度方便部署和作业调整,使用者不需要下来就能移动到合适的作业位置,并且可通过丝杠和键轴的串联组合来改变装置的宽度以适应各种不同尺寸的房间。
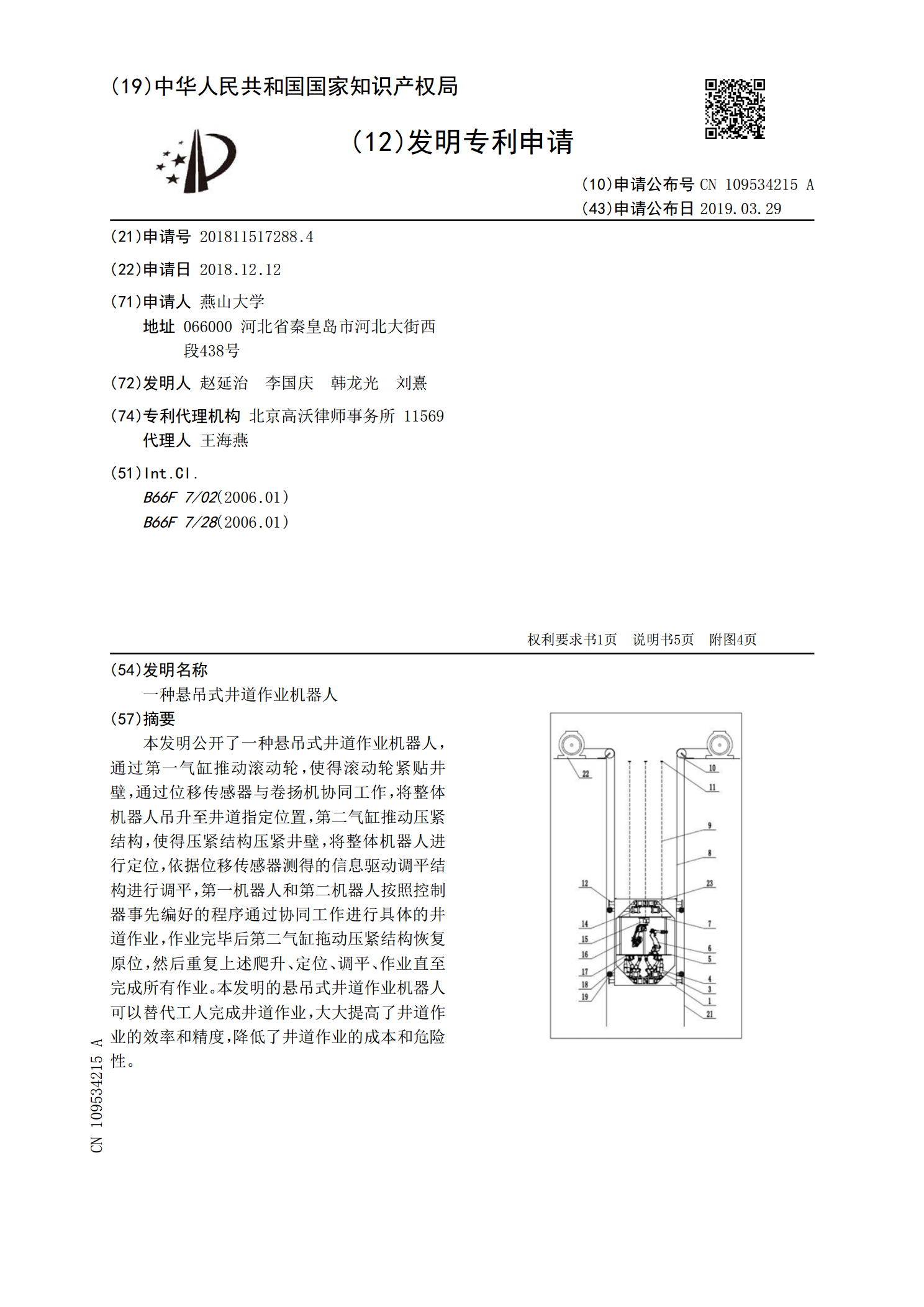
一种悬吊式井道作业机器人.pdf
本发明公开了一种悬吊式井道作业机器人,通过第一气缸推动滚动轮,使得滚动轮紧贴井壁,通过位移传感器与卷扬机协同工作,将整体机器人吊升至井道指定位置,第二气缸推动压紧结构,使得压紧结构压紧井壁,将整体机器人进行定位,依据位移传感器测得的信息驱动调平结构进行调平,第一机器人和第二机器人按照控制器事先编好的程序通过协同工作进行具体的井道作业,作业完毕后第二气缸拖动压紧结构恢复原位,然后重复上述爬升、定位、调平、作业直至完成所有作业。本发明的悬吊式井道作业机器人可以替代工人完成井道作业,大大提高了井道作业的效率和精
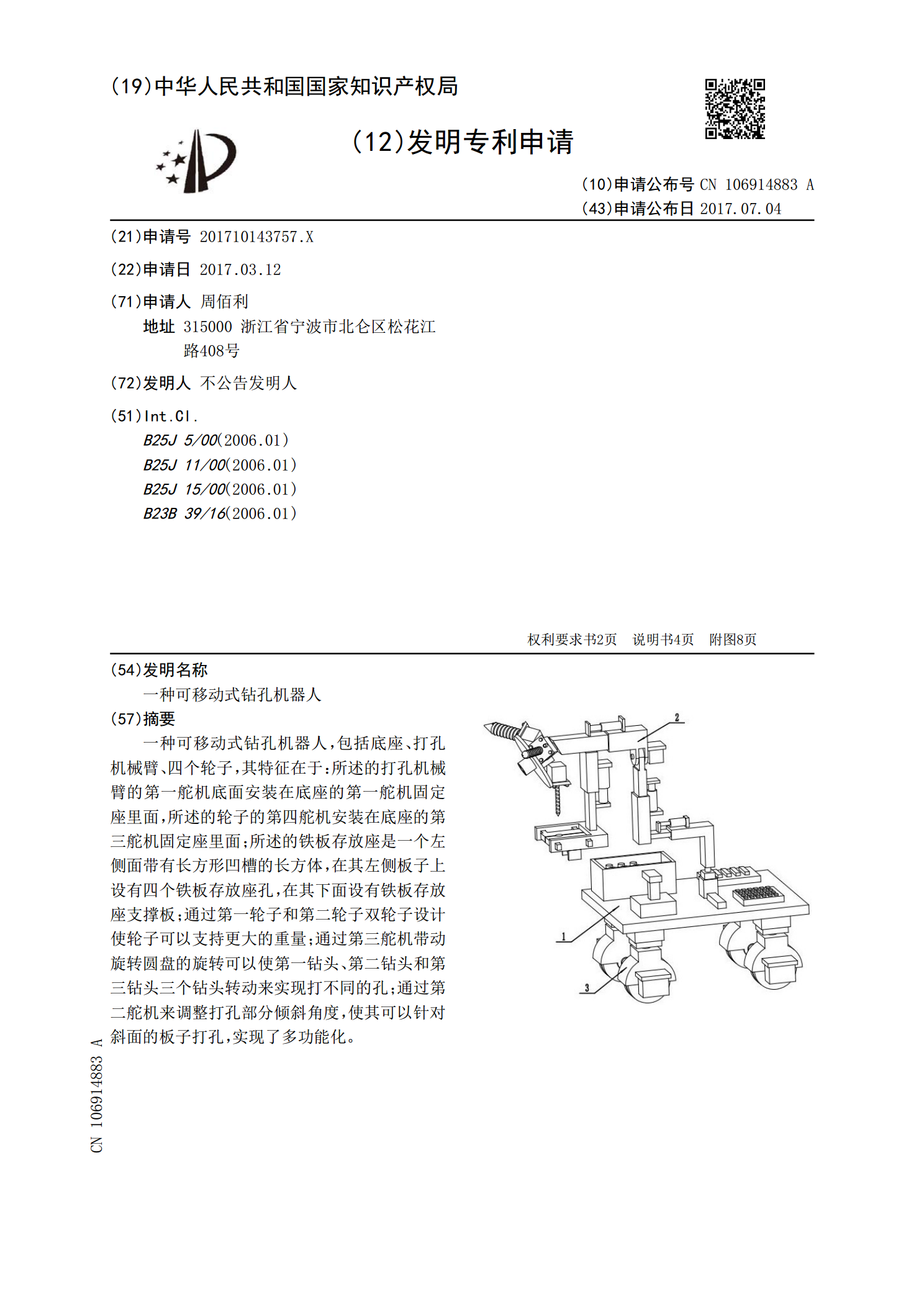
一种可移动式钻孔机器人.pdf
一种可移动式钻孔机器人,包括底座、打孔机械臂、四个轮子,其特征在于:所述的打孔机械臂的第一舵机底面安装在底座的第一舵机固定座里面,所述的轮子的第四舵机安装在底座的第三舵机固定座里面;所述的铁板存放座是一个左侧面带有长方形凹槽的长方体,在其左侧板子上设有四个铁板存放座孔,在其下面设有铁板存放座支撑板;通过第一轮子和第二轮子双轮子设计使轮子可以支持更大的重量;通过第三舵机带动旋转圆盘的旋转可以使第一钻头、第二钻头和第三钻头三个钻头转动来实现打不同的孔;通过第二舵机来调整打孔部分倾斜角度,使其可以针对斜面的板子
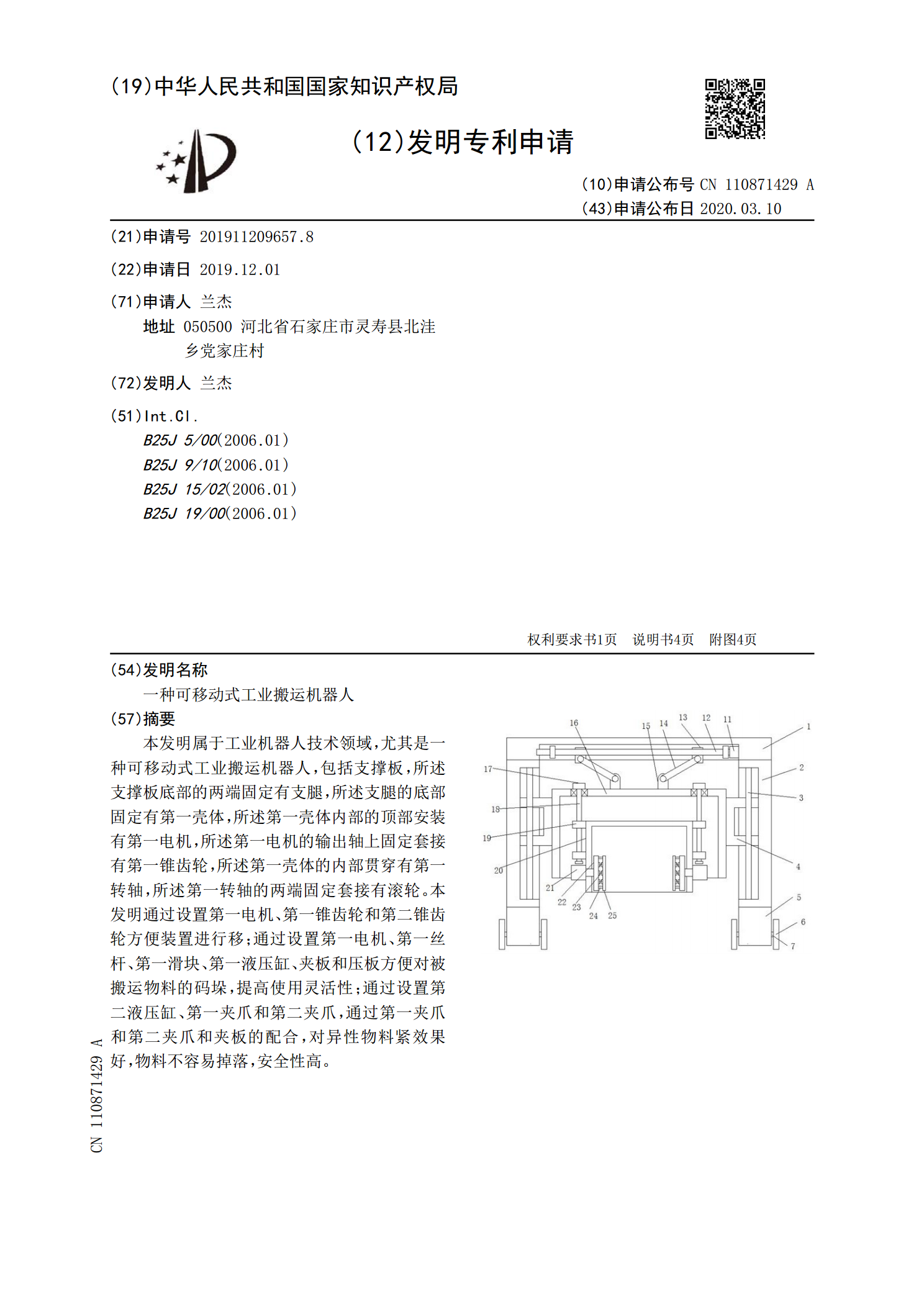
一种可移动式工业搬运机器人.pdf
本发明属于工业机器人技术领域,尤其是一种可移动式工业搬运机器人,包括支撑板,所述支撑板底部的两端固定有支腿,所述支腿的底部固定有第一壳体,所述第一壳体内部的顶部安装有第一电机,所述第一电机的输出轴上固定套接有第一锥齿轮,所述第一壳体的内部贯穿有第一转轴,所述第一转轴的两端固定套接有滚轮。本发明通过设置第一电机、第一锥齿轮和第二锥齿轮方便装置进行移;通过设置第一电机、第一丝杆、第一滑块、第一液压缸、夹板和压板方便对被搬运物料的码垛,提高使用灵活性;通过设置第二液压缸、第一夹爪和第二夹爪,通过第一夹爪和第二夹