
一种多载AGV智能控制系统.pdf

贤惠****66

1/7

2/7

3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多载AGV智能控制系统.pdf
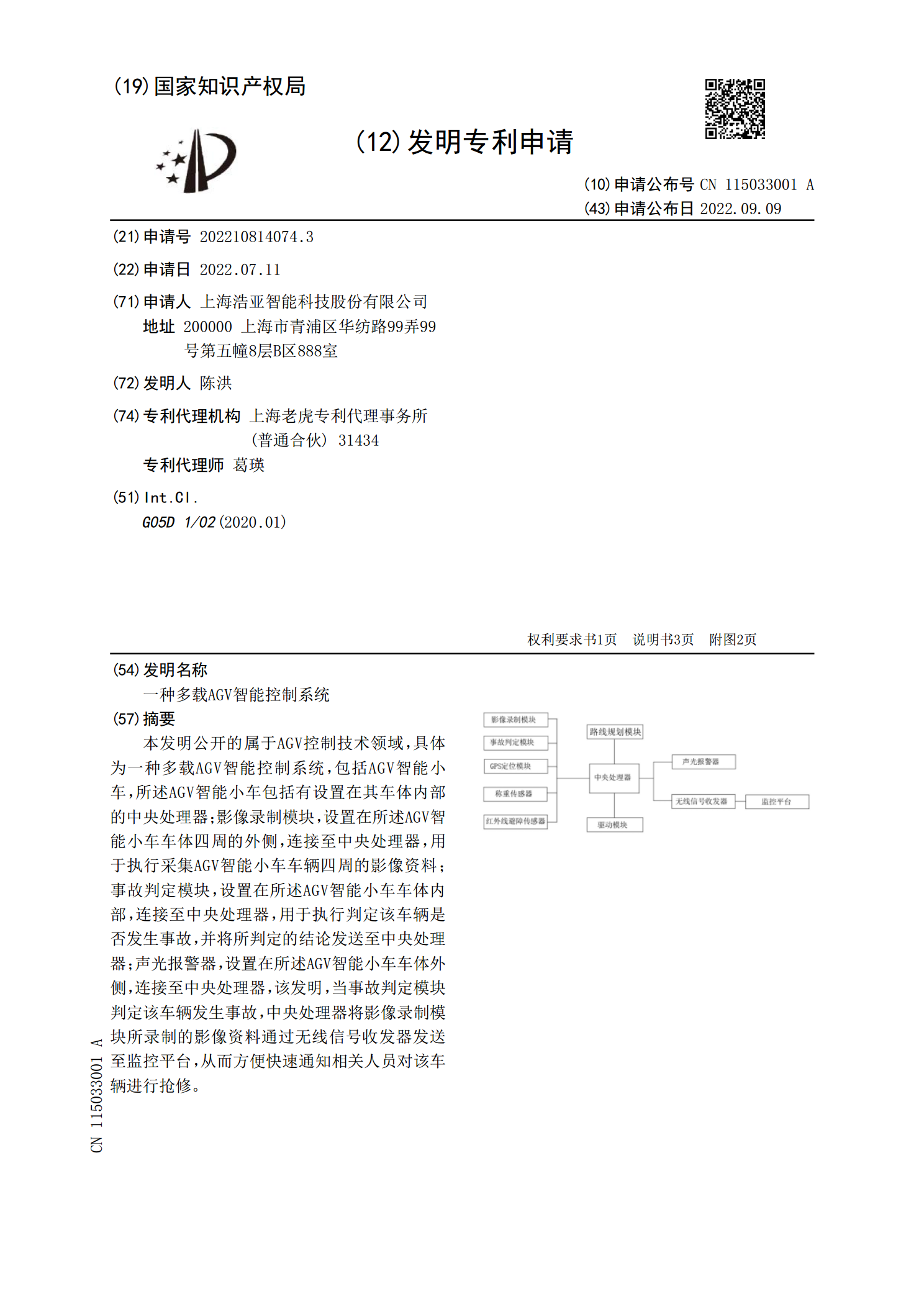
本发明公开的属于AGV控制技术领域,具体为一种多载AGV智能控制系统,包括AGV智能小车,所述AGV智能小车包括有设置在其车体内部的中央处理器;影像录制模块,设置在所述AGV智能小车车体四周的外侧,连接至中央处理器,用于执行采集AGV智能小车车辆四周的影像资料;事故判定模块,设置在所述AGV智能小车车体内部,连接至中央处理器,用于执行判定该车辆是否发生事故,并将所判定的结论发送至中央处理器;声光报警器,设置在所述AGV智能小车车体外侧,连接至中央处理器,该发明,当事故判定模块判定该车辆发生事故,中央处理器
一种智能车载标签AGV控制系统及其控制方法.pdf
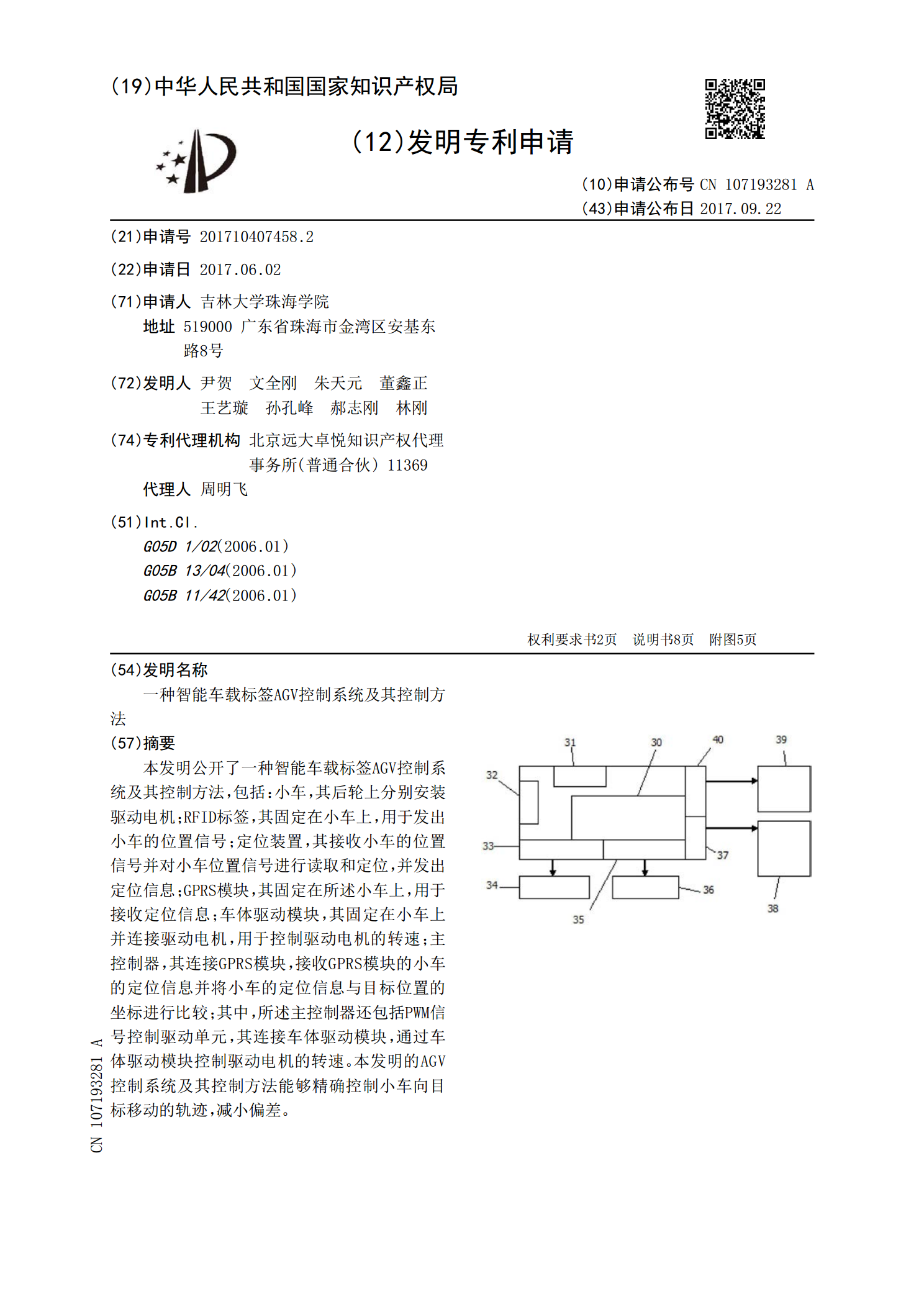
本发明公开了一种智能车载标签AGV控制系统及其控制方法,包括:小车,其后轮上分别安装驱动电机;RFID标签,其固定在小车上,用于发出小车的位置信号;定位装置,其接收小车的位置信号并对小车位置信号进行读取和定位,并发出定位信息;GPRS模块,其固定在所述小车上,用于接收定位信息;车体驱动模块,其固定在小车上并连接驱动电机,用于控制驱动电机的转速;主控制器,其连接GPRS模块,接收GPRS模块的小车的定位信息并将小车的定位信息与目标位置的坐标进行比较;其中,所述主控制器还包括PWM信号控制驱动单元,其连接车体

一种智能AGV叉车.pdf
本发明公开了一种智能AGV叉车,包括转向角度传感器、第一齿轮、编码器、转向电机、第二齿轮、从动轮、货叉、电池及控制器柜、RFID读卡器、磁导航传感器、驱动轮、第三齿轮、转向手柄、第四齿轮、驱动电机和主框体,所述主框体前端安装有货叉;所述主框体中部设有电池及控制器柜,主框体后端左侧设有RFID读卡器,主框体后端左端面设有磁导航传感器;所述主框体底面后端设有驱动轮;所述电池及控制器柜后方的主框体上设有转向电机,转向电机上端设有编码器;所述转向电机右端的主框体上设有驱动电机,驱动电机上端连接的第四齿轮左端啮合有
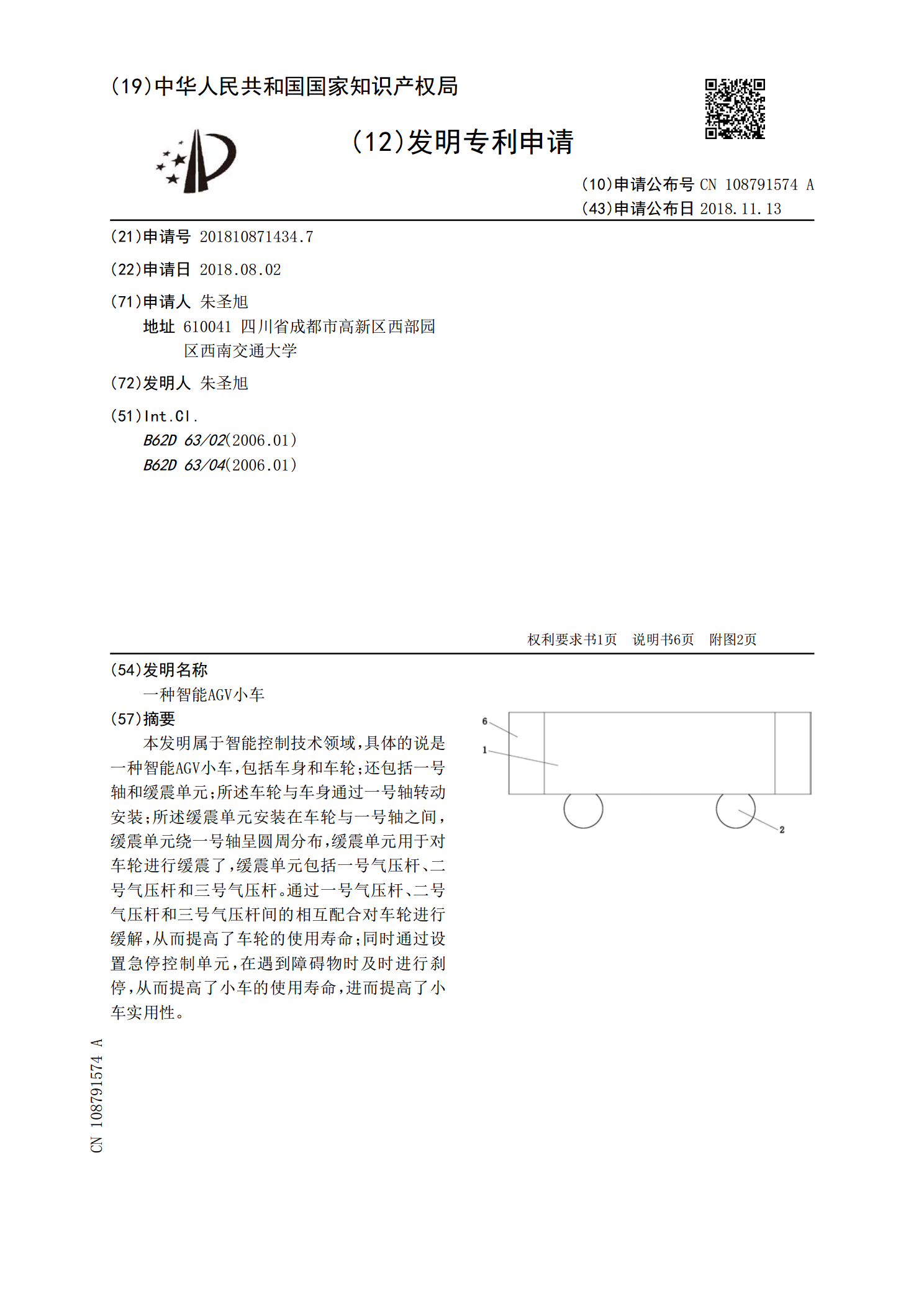
一种智能AGV小车.pdf
本发明属于智能控制技术领域,具体的说是一种智能AGV小车,包括车身和车轮;还包括一号轴和缓震单元;所述车轮与车身通过一号轴转动安装;所述缓震单元安装在车轮与一号轴之间,缓震单元绕一号轴呈圆周分布,缓震单元用于对车轮进行缓震了,缓震单元包括一号气压杆、二号气压杆和三号气压杆。通过一号气压杆、二号气压杆和三号气压杆间的相互配合对车轮进行缓解,从而提高了车轮的使用寿命;同时通过设置急停控制单元,在遇到障碍物时及时进行刹停,从而提高了小车的使用寿命,进而提高了小车实用性。
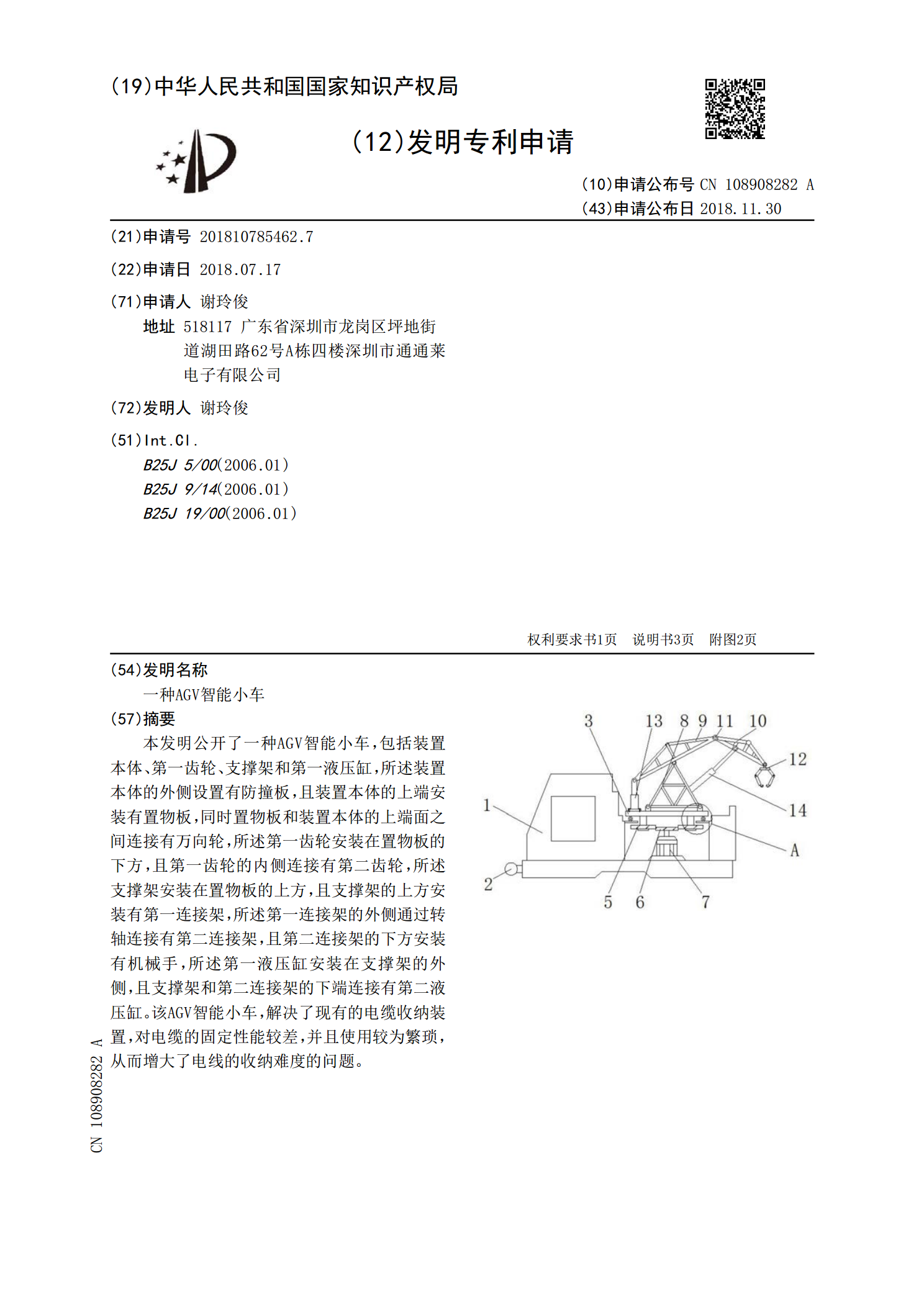
一种AGV智能小车.pdf
本发明公开了一种AGV智能小车,包括装置本体、第一齿轮、支撑架和第一液压缸,所述装置本体的外侧设置有防撞板,且装置本体的上端安装有置物板,同时置物板和装置本体的上端面之间连接有万向轮,所述第一齿轮安装在置物板的下方,且第一齿轮的内侧连接有第二齿轮,所述支撑架安装在置物板的上方,且支撑架的上方安装有第一连接架,所述第一连接架的外侧通过转轴连接有第二连接架,且第二连接架的下方安装有机械手,所述第一液压缸安装在支撑架的外侧,且支撑架和第二连接架的下端连接有第二液压缸。该AGV智能小车,解决了现有的电缆收纳装置,