
一种智能AGV小车.pdf

一吃****天材

1/10
2/10
3/10

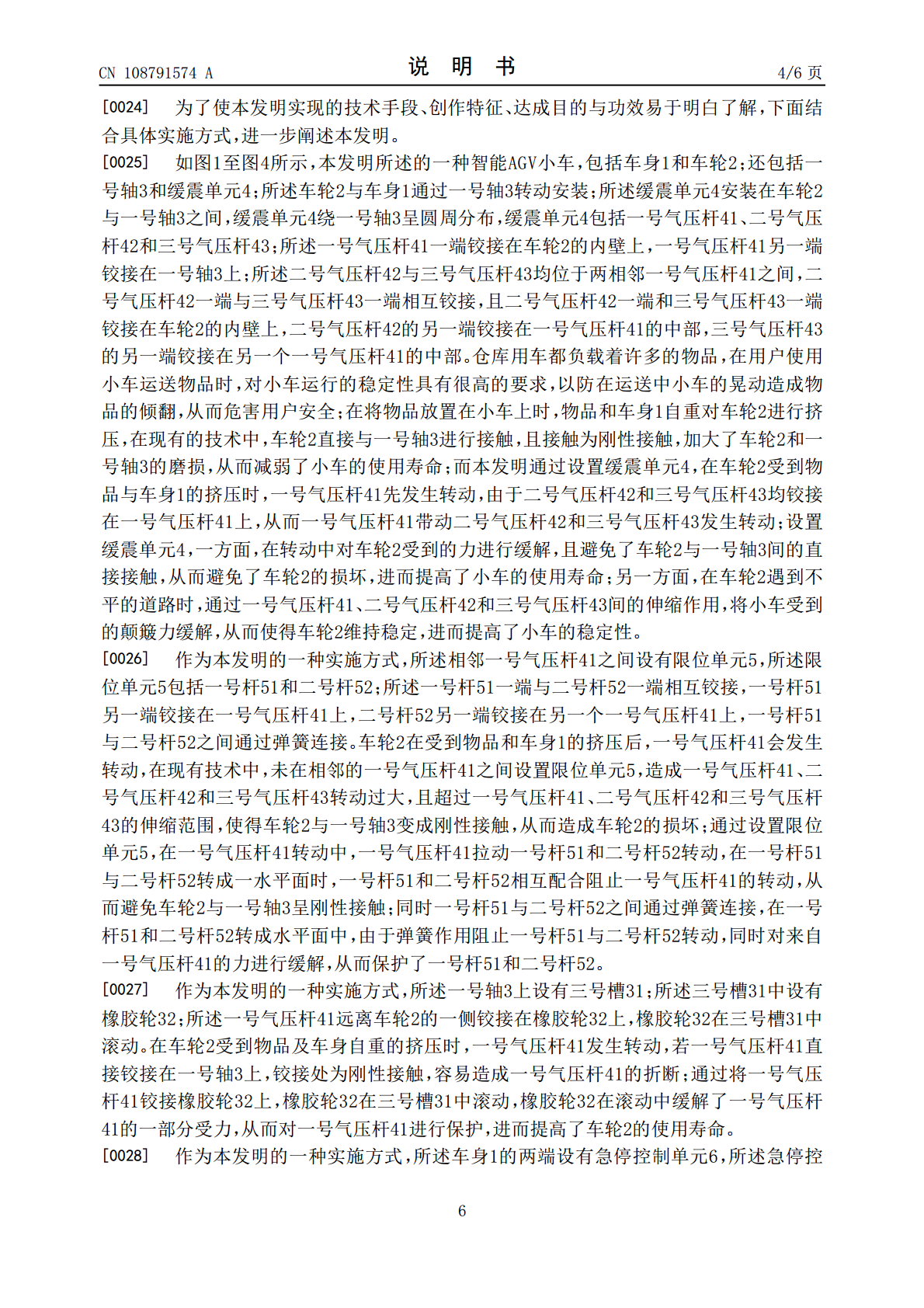
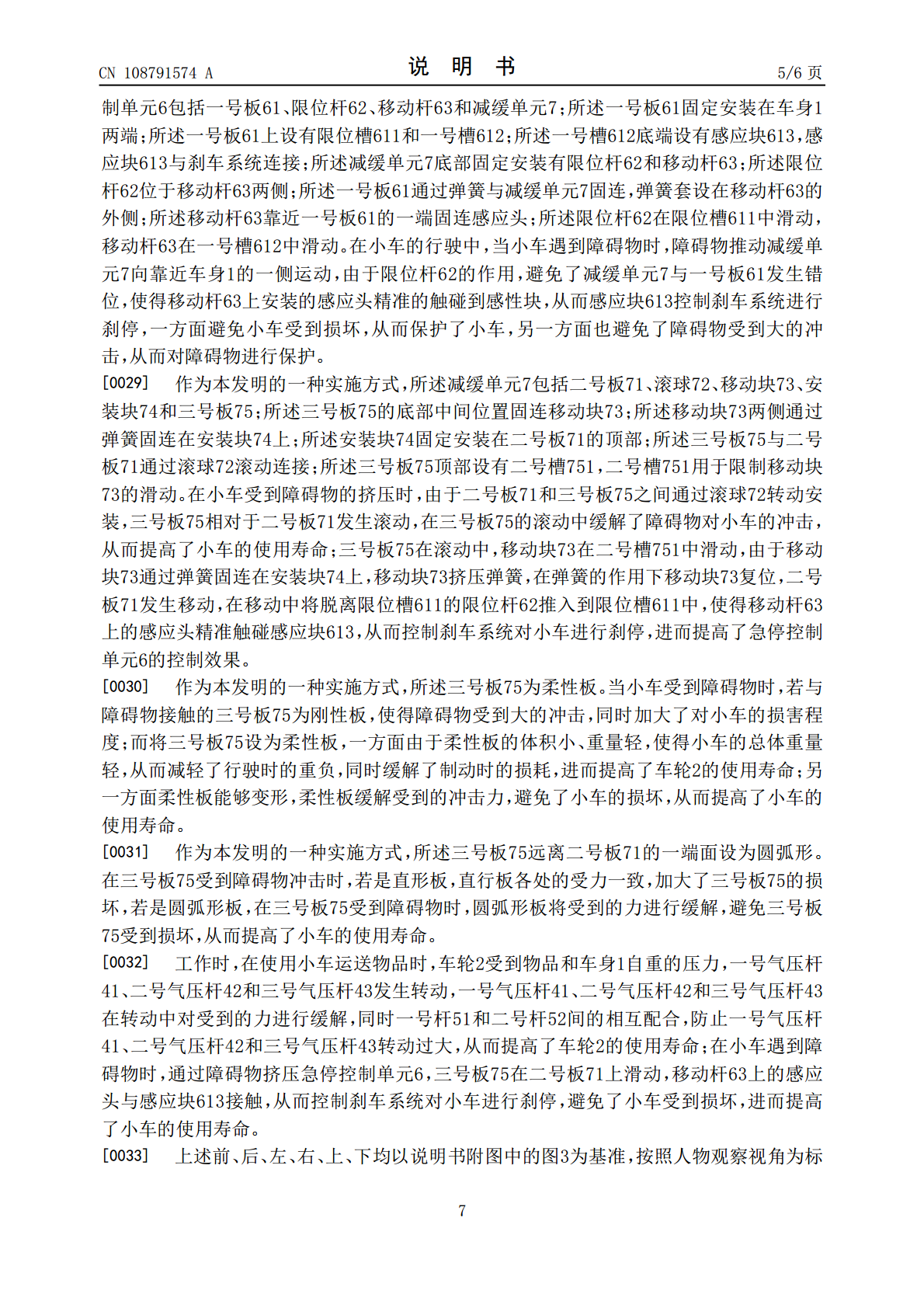
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能AGV小车.pdf
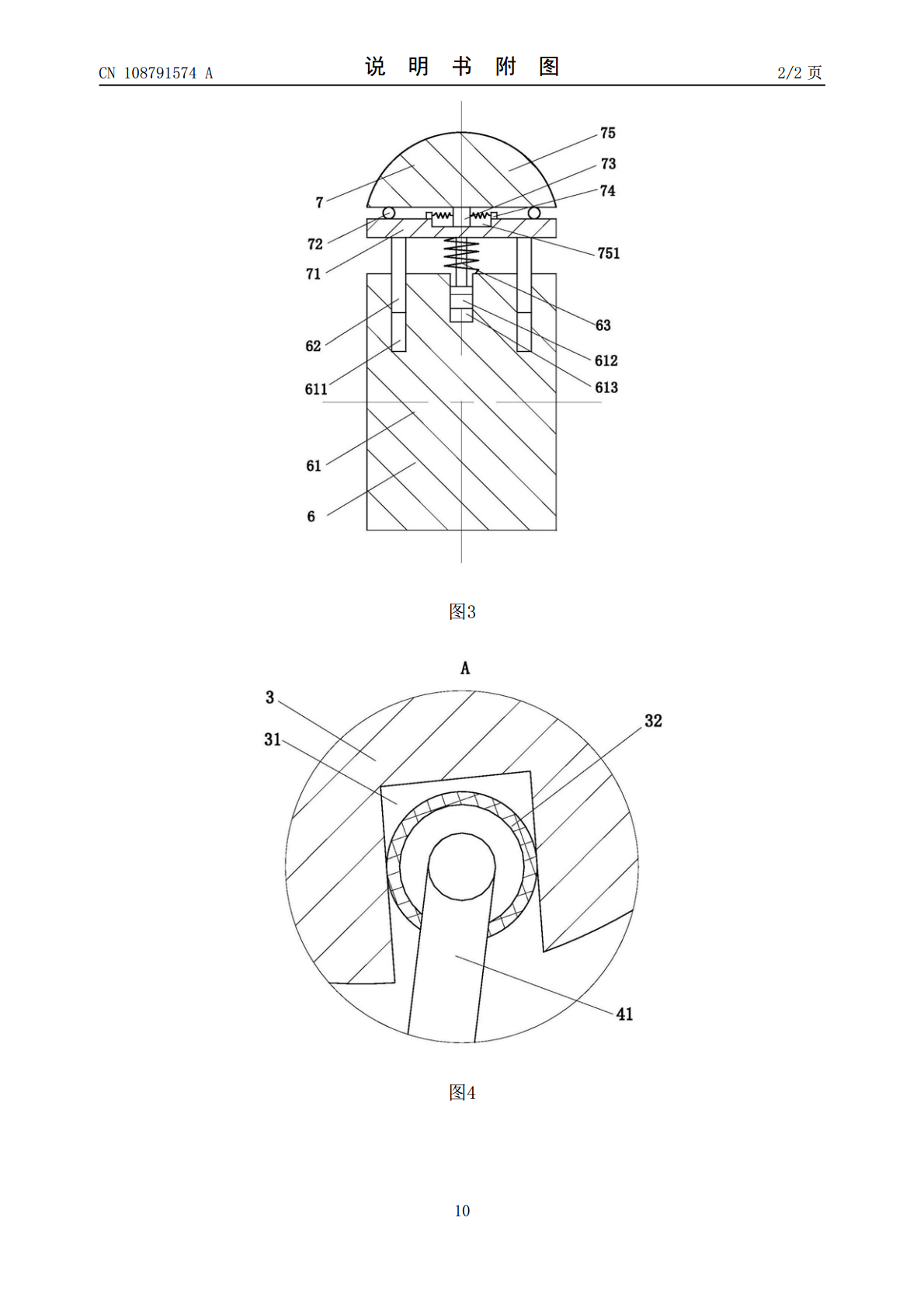
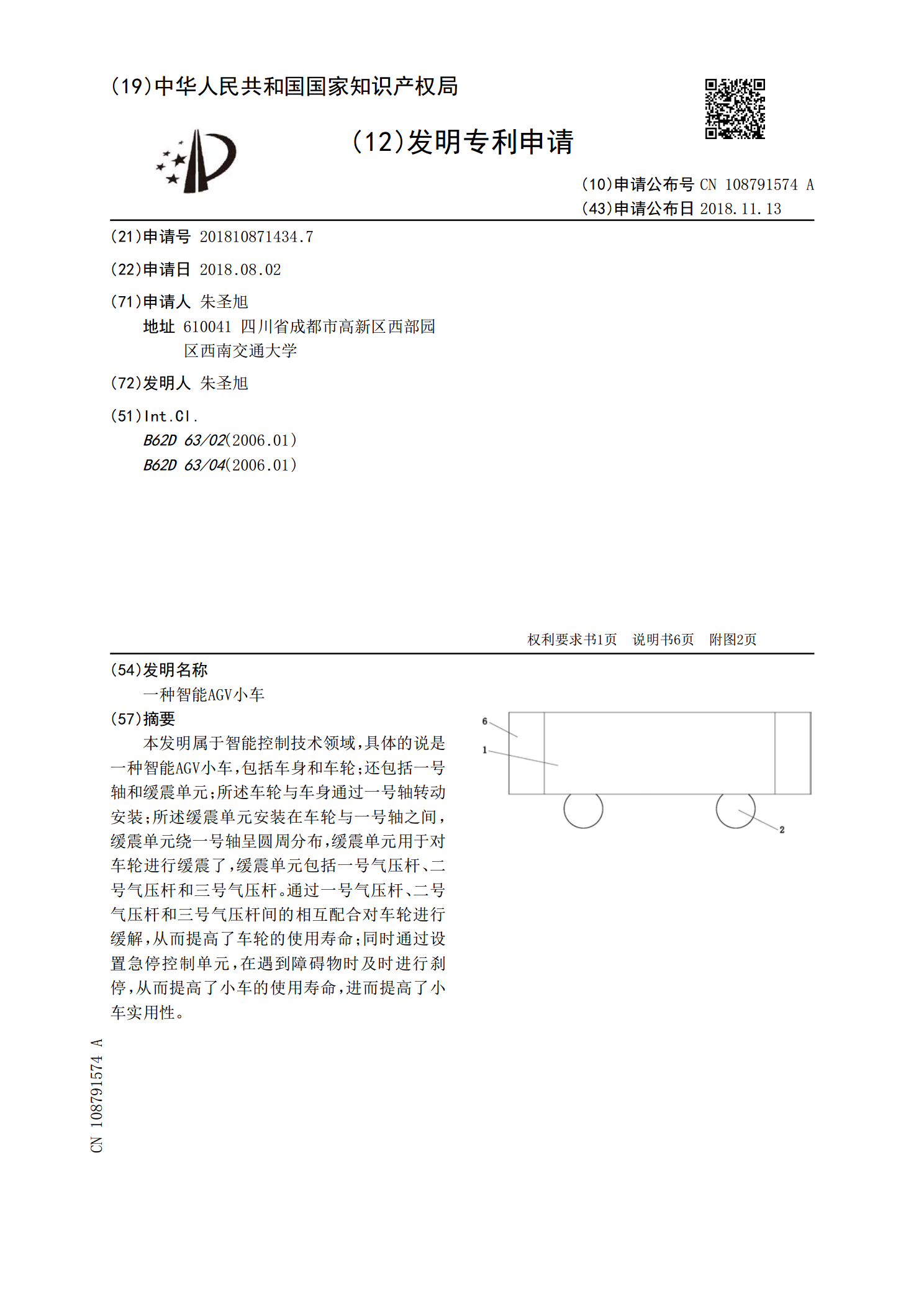
本发明属于智能控制技术领域,具体的说是一种智能AGV小车,包括车身和车轮;还包括一号轴和缓震单元;所述车轮与车身通过一号轴转动安装;所述缓震单元安装在车轮与一号轴之间,缓震单元绕一号轴呈圆周分布,缓震单元用于对车轮进行缓震了,缓震单元包括一号气压杆、二号气压杆和三号气压杆。通过一号气压杆、二号气压杆和三号气压杆间的相互配合对车轮进行缓解,从而提高了车轮的使用寿命;同时通过设置急停控制单元,在遇到障碍物时及时进行刹停,从而提高了小车的使用寿命,进而提高了小车实用性。
一种AGV智能小车.pdf
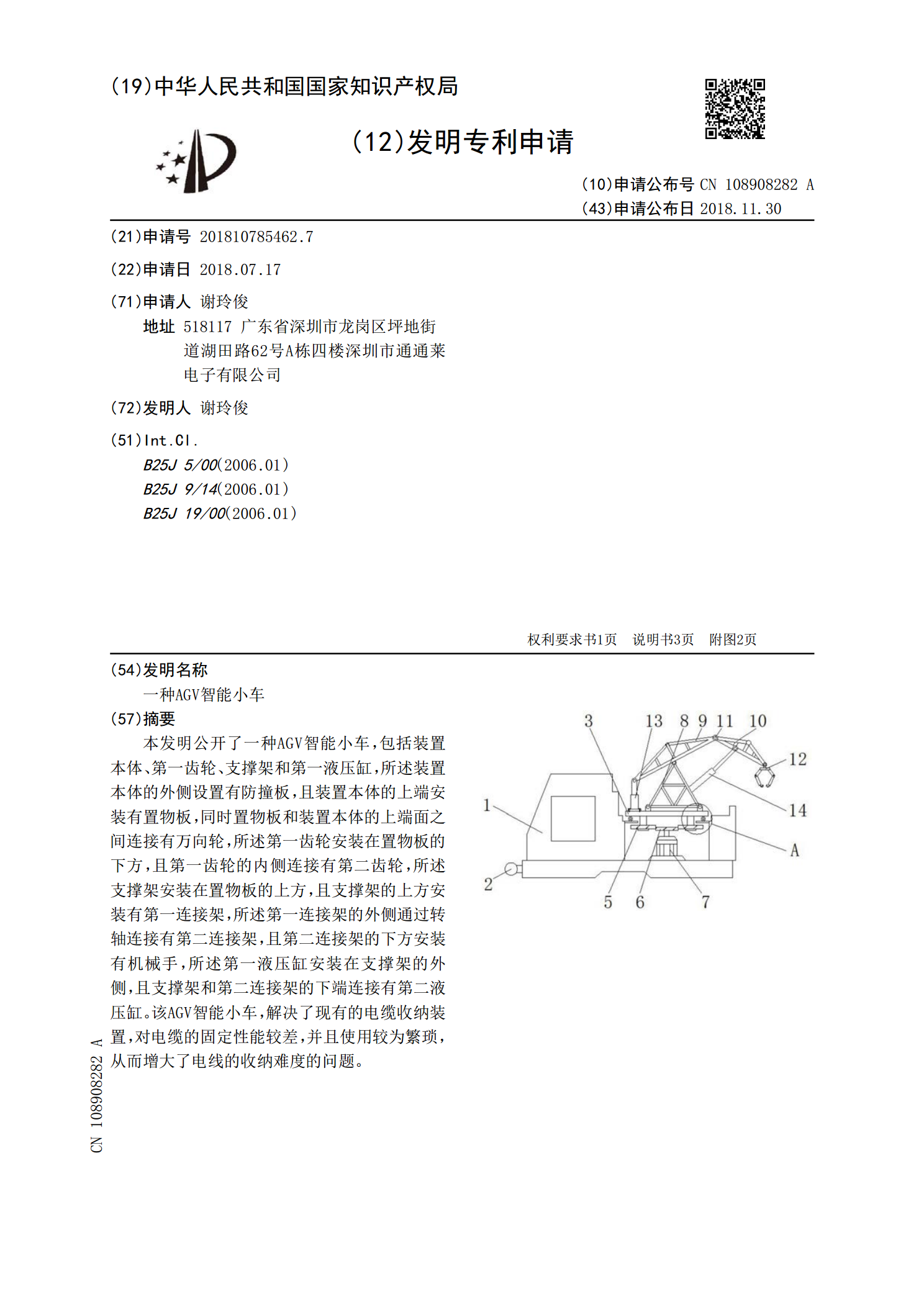
本发明公开了一种AGV智能小车,包括装置本体、第一齿轮、支撑架和第一液压缸,所述装置本体的外侧设置有防撞板,且装置本体的上端安装有置物板,同时置物板和装置本体的上端面之间连接有万向轮,所述第一齿轮安装在置物板的下方,且第一齿轮的内侧连接有第二齿轮,所述支撑架安装在置物板的上方,且支撑架的上方安装有第一连接架,所述第一连接架的外侧通过转轴连接有第二连接架,且第二连接架的下方安装有机械手,所述第一液压缸安装在支撑架的外侧,且支撑架和第二连接架的下端连接有第二液压缸。该AGV智能小车,解决了现有的电缆收纳装置,

一种智能AGV小车及其系统.pdf
一种智能AGV小车及其系统,所述AGV小车包括车体、装载装置、小车控制柜、驱动组件和万向轮,所述装载装置设置于所述车体的上端面,所述小车控制柜的底部设有滑轮,所述小车控制柜通过所述小车内部设有的导轨采用抽屉形式可抽出的设置于所述小车的内部,所述驱动组件设置于所述车体的底部,所述驱动组件包括驱动电机和驱动轮,所述驱动轮连接于所述驱动电机的输出端;所述AGV小车由所述驱动轮和万向轮支撑于地面,所述驱动电机驱动所述驱动轮进行前进和后退运动。本发明提出一种代替人工转移搬运的智能AGV小车及其系统,实现不同方位、远
一种AGV智能小车及其控制方法.pdf
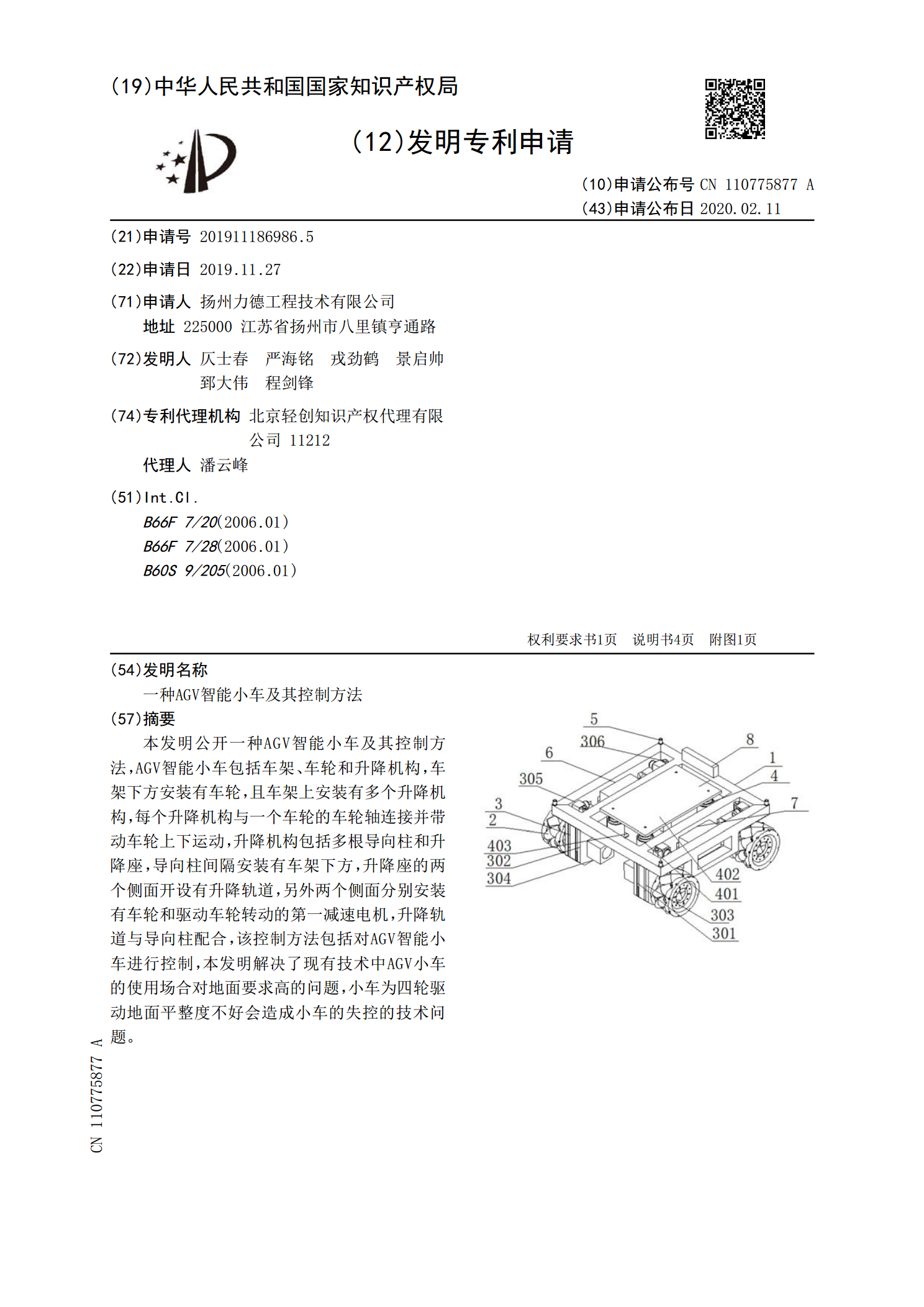
本发明公开一种AGV智能小车及其控制方法,AGV智能小车包括车架、车轮和升降机构,车架下方安装有车轮,且车架上安装有多个升降机构,每个升降机构与一个车轮的车轮轴连接并带动车轮上下运动,升降机构包括多根导向柱和升降座,导向柱间隔安装有车架下方,升降座的两个侧面开设有升降轨道,另外两个侧面分别安装有车轮和驱动车轮转动的第一减速电机,升降轨道与导向柱配合,该控制方法包括对AGV智能小车进行控制,本发明解决了现有技术中AGV小车的使用场合对地面要求高的问题,小车为四轮驱动地面平整度不好会造成小车的失控的技术问题。

智能移动小车AGV简介.ppt
第七章自动导引车7.1.1AGV的发展现状20世纪50年代中期,Barret公司设计出无人驾驶卡车,也就是AGV的最早雏形。后来,美国物料搬运研究所将其定义为AGV,它是可充电的无人驾驶小车,可根据路径和定位情况编程,而且行走的路线可以改变和扩展。据报导,到1960年时,欧洲就安装了各种型号不同水平的自动搬运车系统,使用了13,000多台AGV。1959年AGV开始用于仓库自动化和工厂作业中。日本也从这时开始引进AGV技术。日本是使用这种车辆最多的国家,在20世纪80年代末,拥有各种类型的自动搬运车超过一