
取放料机构.pdf

春波****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
取放料机构.pdf
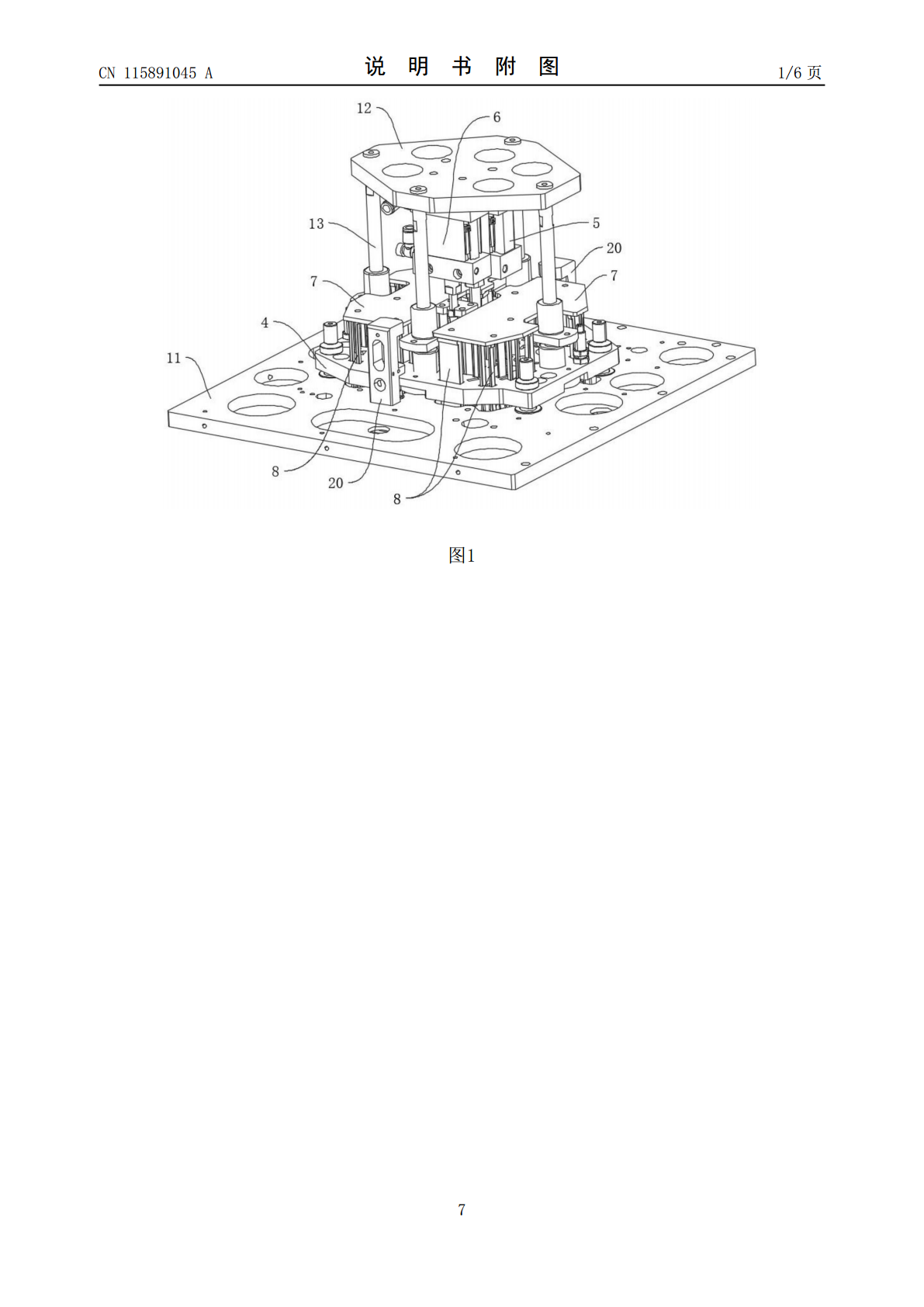
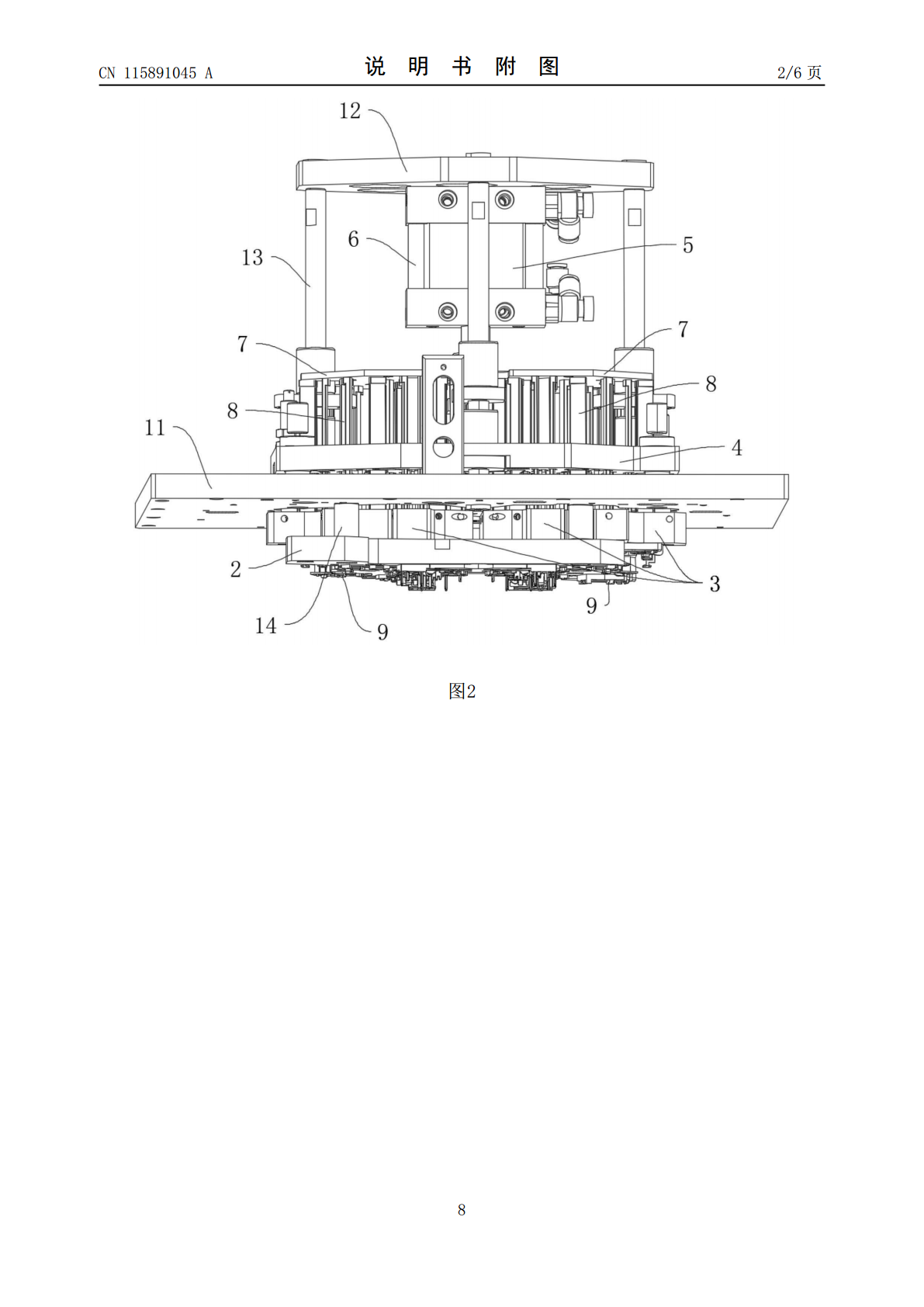
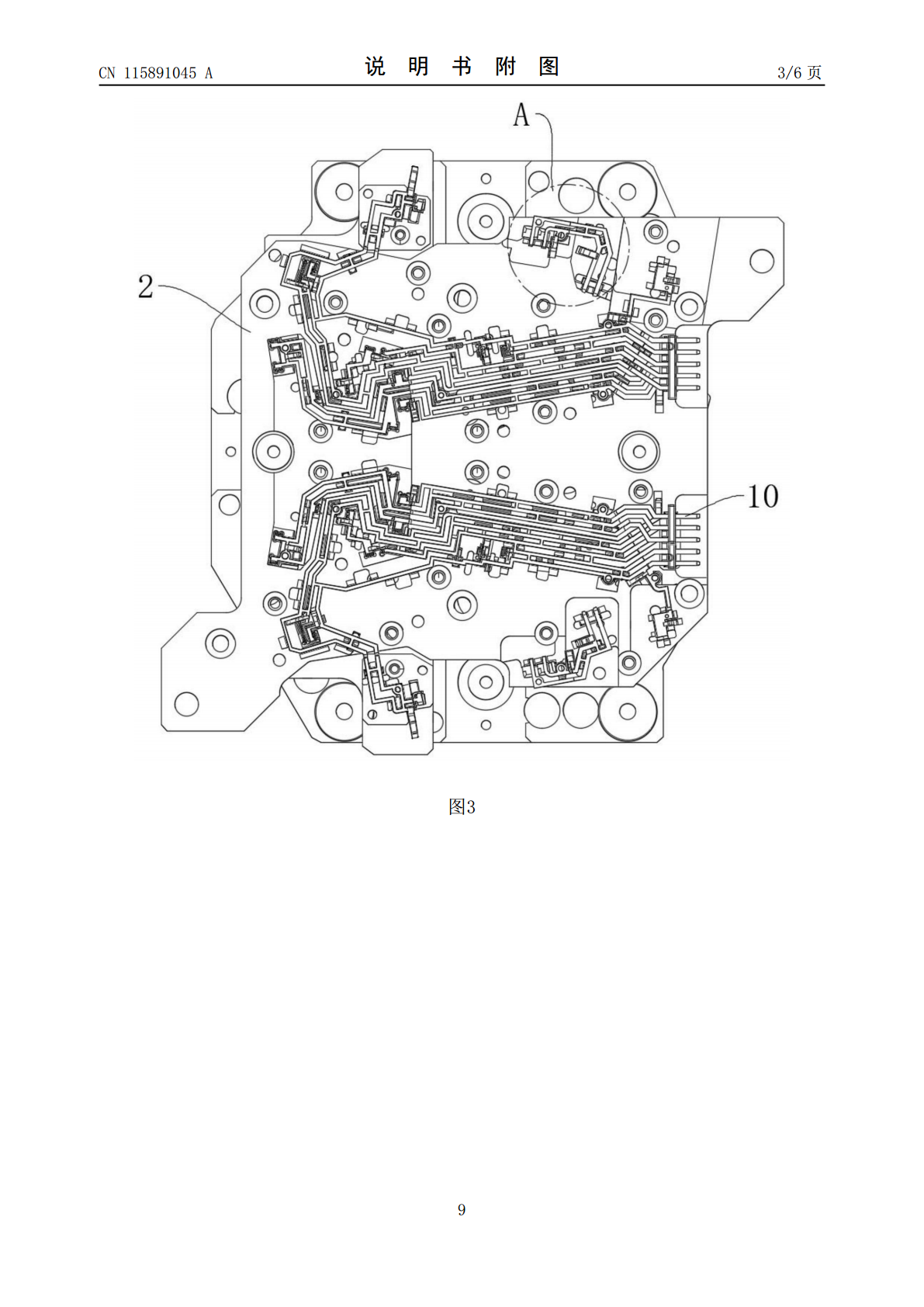
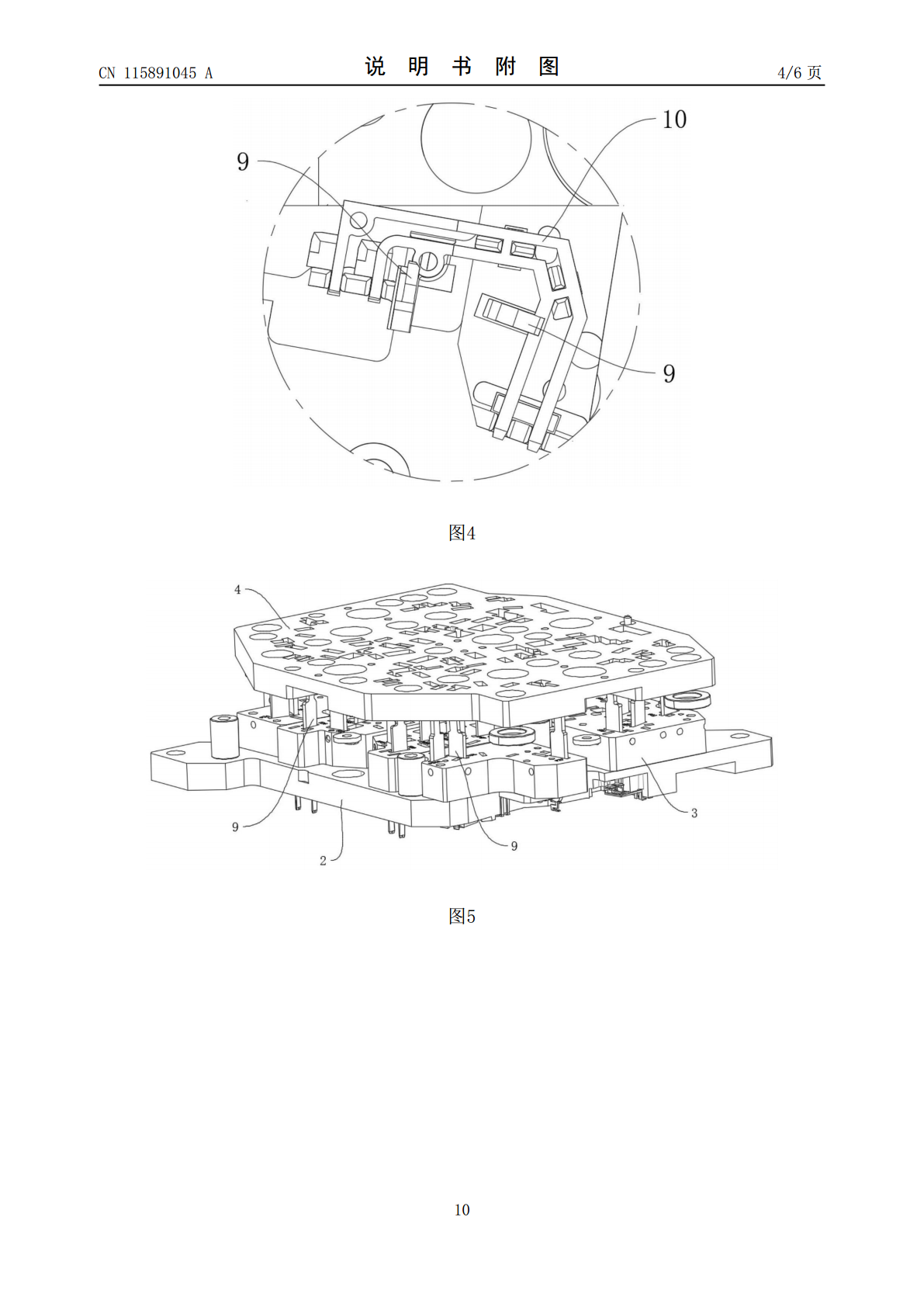
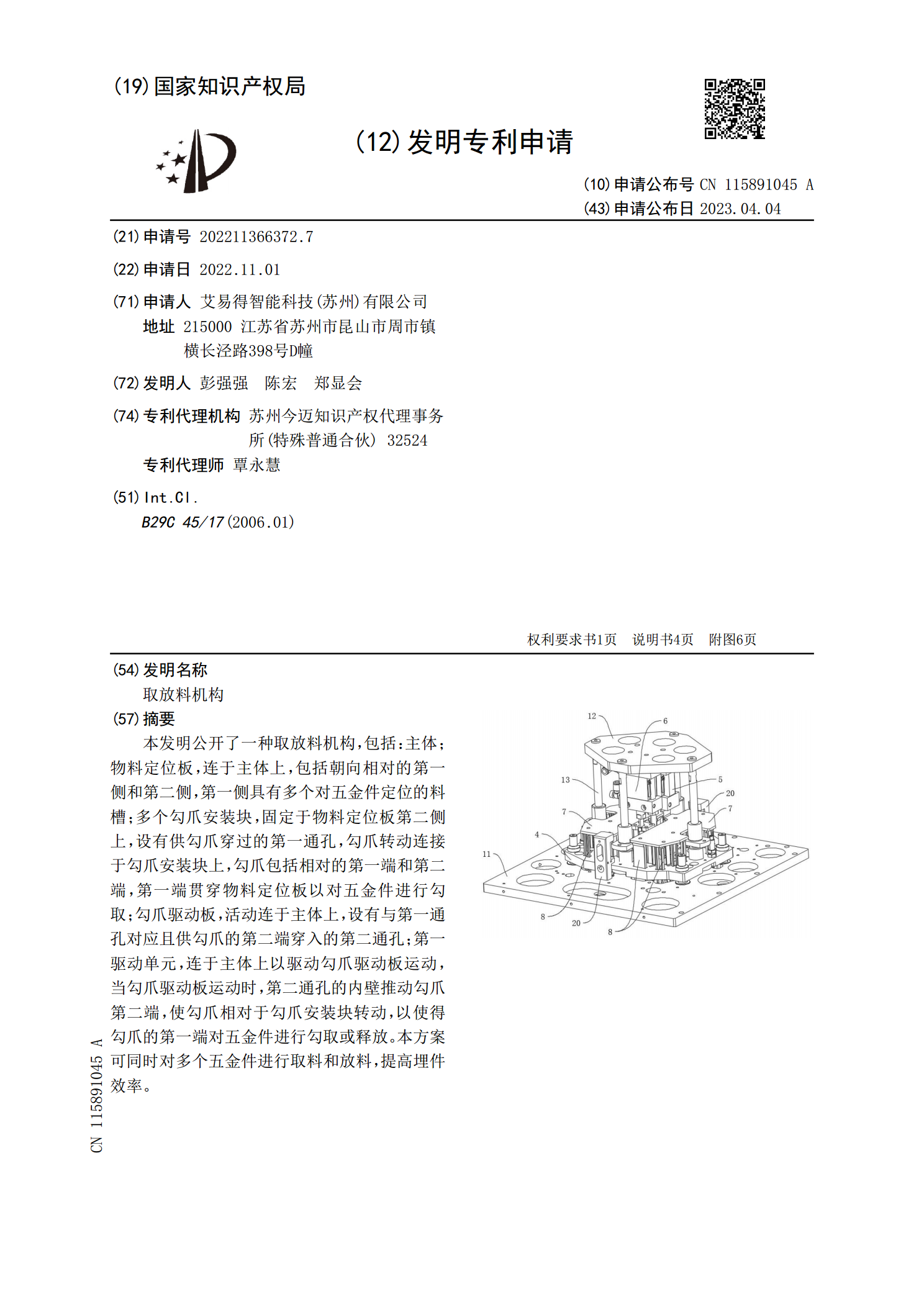
本发明公开了一种取放料机构,包括:主体;物料定位板,连于主体上,包括朝向相对的第一侧和第二侧,第一侧具有多个对五金件定位的料槽;多个勾爪安装块,固定于物料定位板第二侧上,设有供勾爪穿过的第一通孔,勾爪转动连接于勾爪安装块上,勾爪包括相对的第一端和第二端,第一端贯穿物料定位板以对五金件进行勾取;勾爪驱动板,活动连于主体上,设有与第一通孔对应且供勾爪的第二端穿入的第二通孔;第一驱动单元,连于主体上以驱动勾爪驱动板运动,当勾爪驱动板运动时,第二通孔的内壁推动勾爪第二端,使勾爪相对于勾爪安装块转动,以使得勾爪的第
驱动机构及取放料装置.pdf
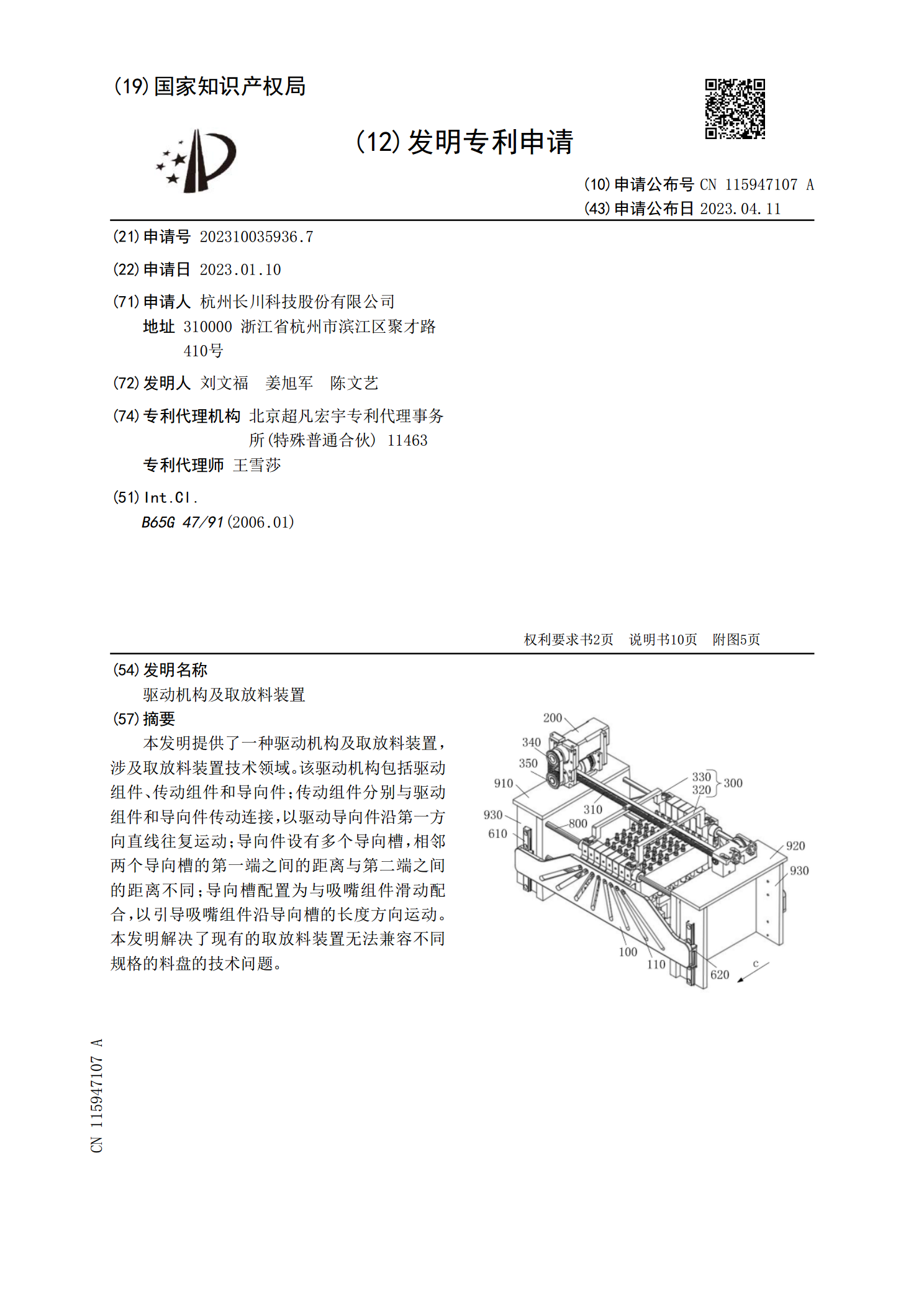
本发明提供了一种驱动机构及取放料装置,涉及取放料装置技术领域。该驱动机构包括驱动组件、传动组件和导向件;传动组件分别与驱动组件和导向件传动连接,以驱动导向件沿第一方向直线往复运动;导向件设有多个导向槽,相邻两个导向槽的第一端之间的距离与第二端之间的距离不同;导向槽配置为与吸嘴组件滑动配合,以引导吸嘴组件沿导向槽的长度方向运动。本发明解决了现有的取放料装置无法兼容不同规格的料盘的技术问题。
一种定位取放料机构.pdf
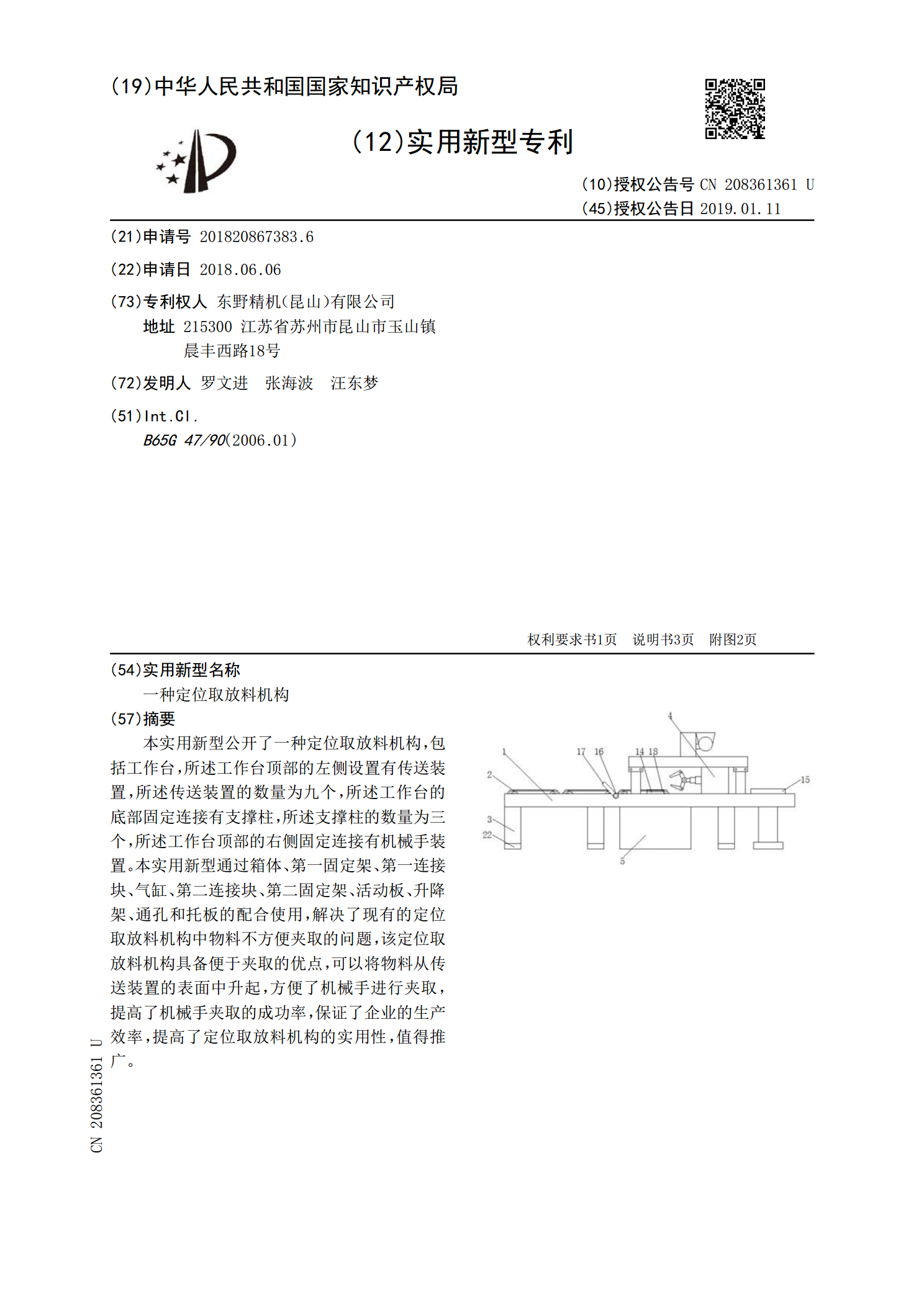
本实用新型公开了一种定位取放料机构,包括工作台,所述工作台顶部的左侧设置有传送装置,所述传送装置的数量为九个,所述工作台的底部固定连接有支撑柱,所述支撑柱的数量为三个,所述工作台顶部的右侧固定连接有机械手装置。本实用新型通过箱体、第一固定架、第一连接块、气缸、第二连接块、第二固定架、活动板、升降架、通孔和托板的配合使用,解决了现有的定位取放料机构中物料不方便夹取的问题,该定位取放料机构具备便于夹取的优点,可以将物料从传送装置的表面中升起,方便了机械手进行夹取,提高了机械手夹取的成功率,保证了企业的生产效率
取放料治具和取放料系统.pdf
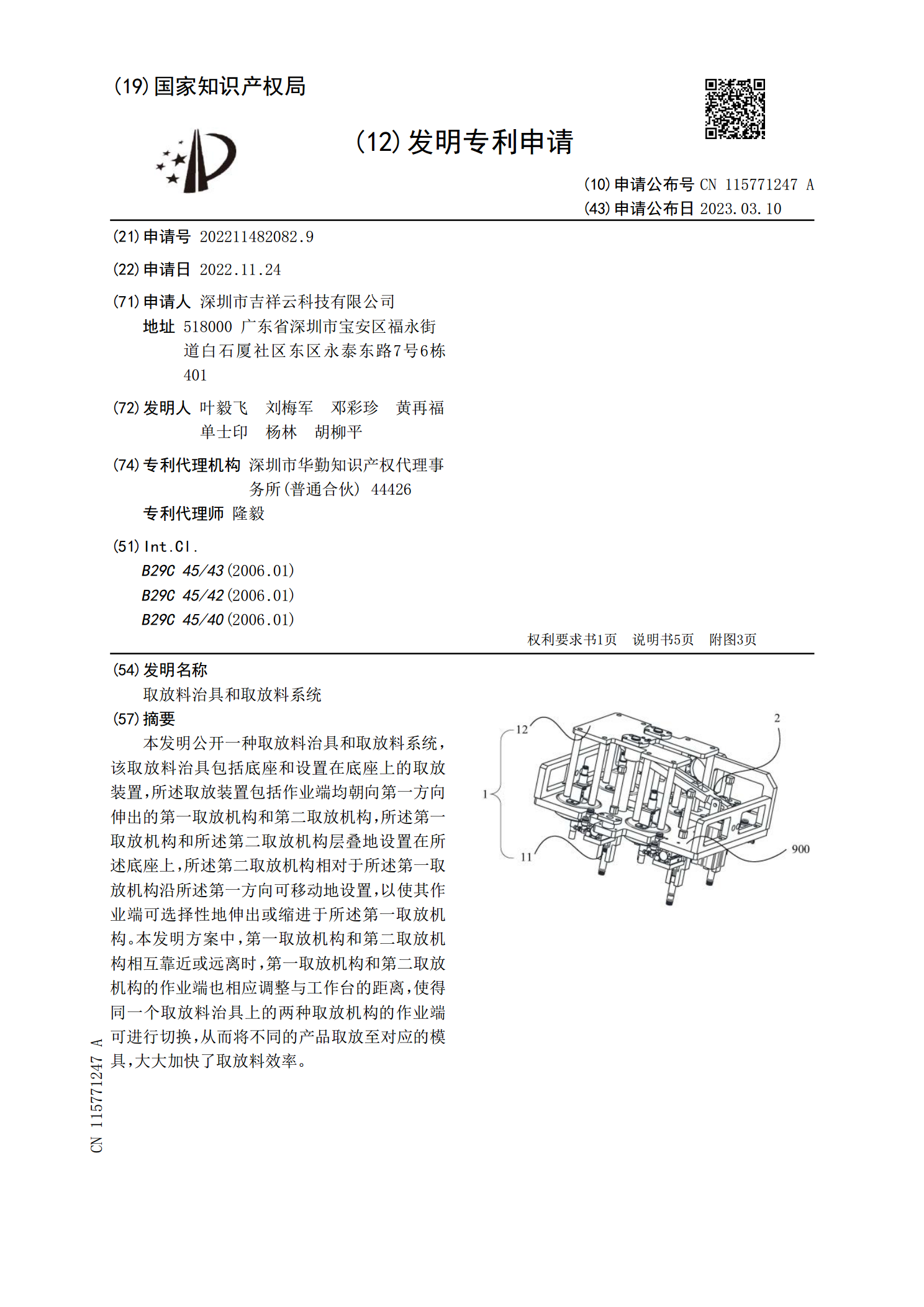
本发明公开一种取放料治具和取放料系统,该取放料治具包括底座和设置在底座上的取放装置,所述取放装置包括作业端均朝向第一方向伸出的第一取放机构和第二取放机构,所述第一取放机构和所述第二取放机构层叠地设置在所述底座上,所述第二取放机构相对于所述第一取放机构沿所述第一方向可移动地设置,以使其作业端可选择性地伸出或缩进于所述第一取放机构。本发明方案中,第一取放机构和第二取放机构相互靠近或远离时,第一取放机构和第二取放机构的作业端也相应调整与工作台的距离,使得同一个取放料治具上的两种取放机构的作业端可进行切换,从而将
取料系统的取料控制方法及装置、取料机构、烹饪机构.pdf
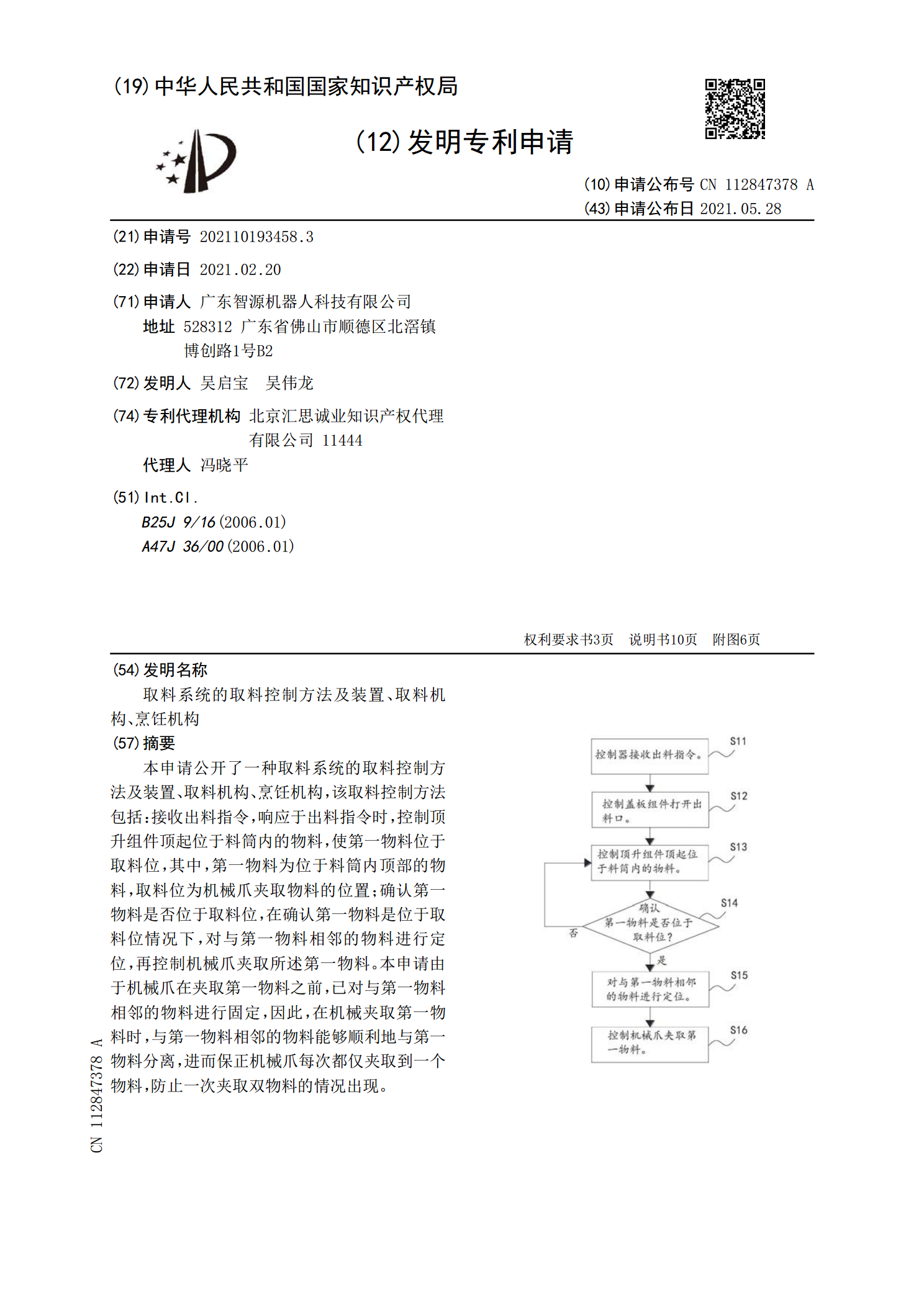
本申请公开了一种取料系统的取料控制方法及装置、取料机构、烹饪机构,该取料控制方法包括:接收出料指令,响应于出料指令时,控制顶升组件顶起位于料筒内的物料,使第一物料位于取料位,其中,第一物料为位于料筒内顶部的物料,取料位为机械爪夹取物料的位置;确认第一物料是否位于取料位,在确认第一物料是位于取料位情况下,对与第一物料相邻的物料进行定位,再控制机械爪夹取所述第一物料。本申请由于机械爪在夹取第一物料之前,已对与第一物料相邻的物料进行固定,因此,在机械夹取第一物料时,与第一物料相邻的物料能够顺利地与第一物料分离,