
智能夹取装置.pdf

小琛****82


1/8
2/8
3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能夹取装置.pdf
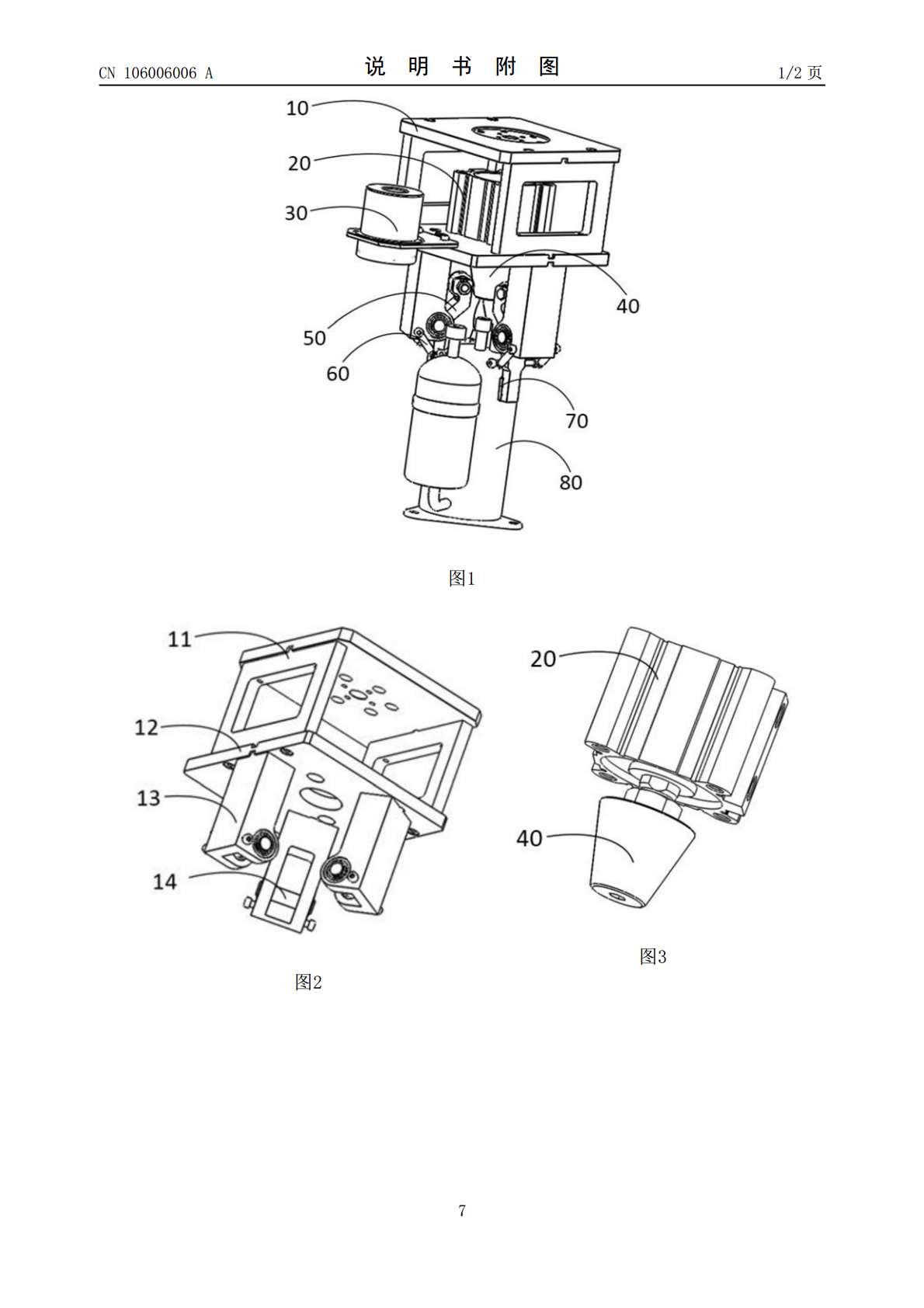
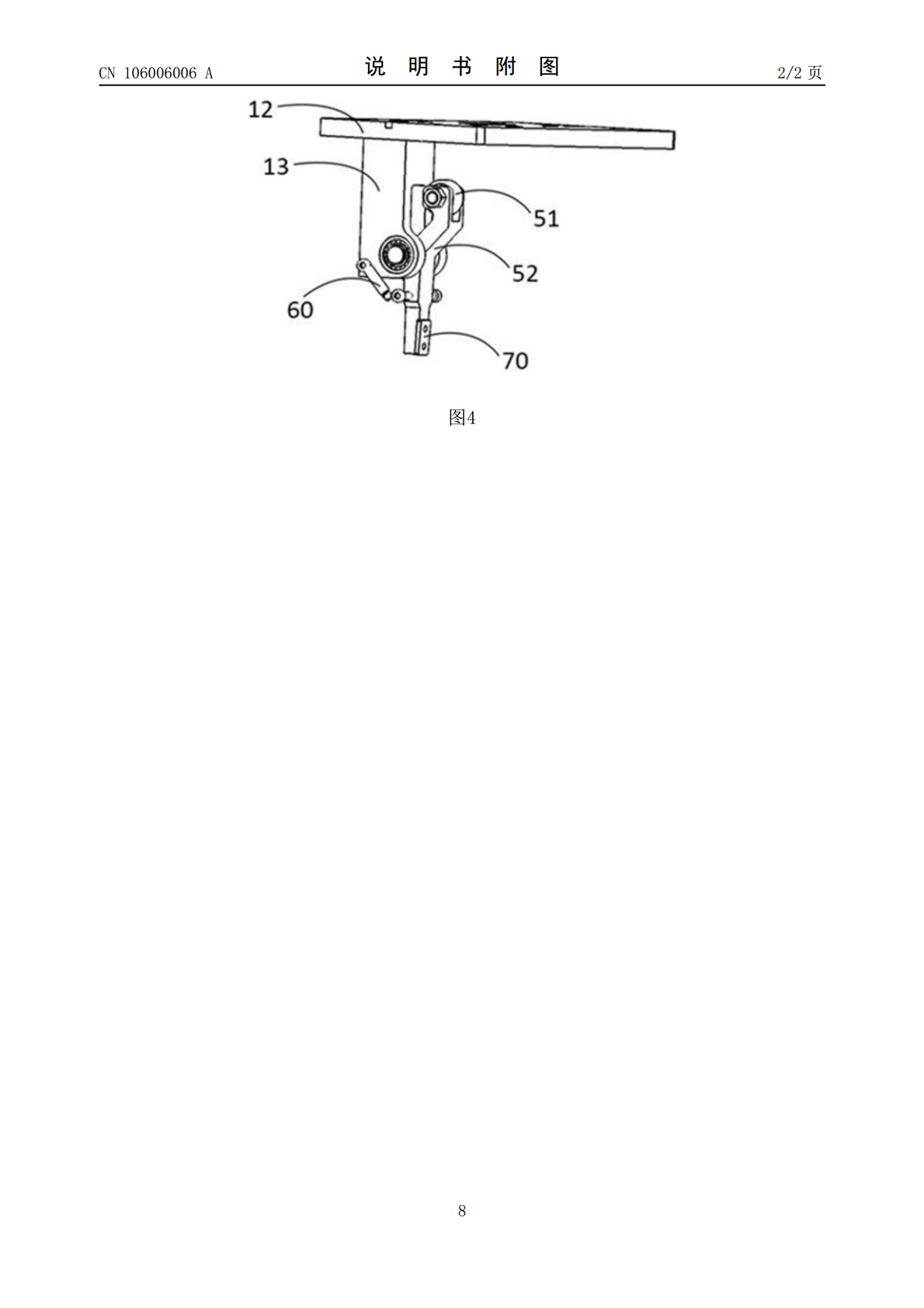
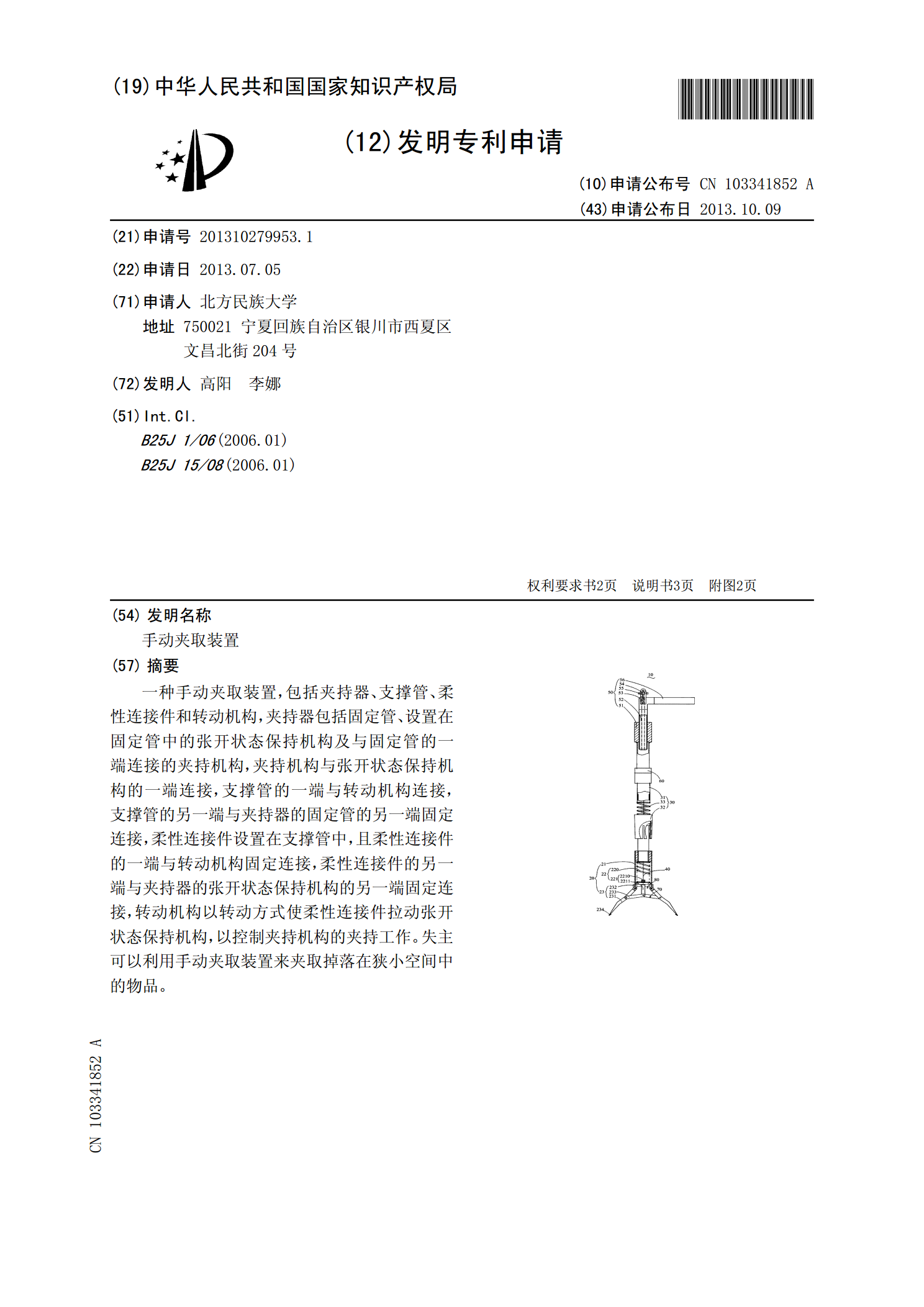
本发明公开了一种智能夹取装置,该装置包括主体机架、顶出机构、视觉相机、胀紧锥体、加力夹杆和夹杆复位机构,主体机架包括外连接架、安装架和加力夹杆支腿,外连接架安装在安装架的上方,加力夹杆支腿安装在安装架的下方;顶出机构设于安装架的上方,并与胀紧锥体相连,该胀紧锥体为上大下小的锥形台结构;视觉相机安装在所述安装架的侧面;加力夹杆设于加力夹杆支腿的底端,并与加力夹杆支腿可转动连接;夹杆复位机构分别与加力夹杆和加力夹杆支腿相连。本发明可实现压缩机的自动化夹取,具有适应性强、可调节性好等优点。

一种智能机器人夹取装置.pdf
本发明公开了一种智能机器人夹取装置,它涉及智能机器人领域,它包含安装座、凸轮头、杠杆夹钳、卡爪、力传感器、伺服电机、液压推杆、液压驱动箱、脚轮、控制键盘、显示屏、控制面板、机体、控制主机,机体底面设置有脚轮,机体表面设置有控制面板,控制面板上设置有显示屏。它设置有力传感器,能够实时检测卡爪夹取工件时的夹持力信息,使用者可以通过控制键盘设置预定夹持力值,在装置工作时实时将卡爪夹取工件的夹持力值显示在显示屏上,供试用者观察调整,避免了因为夹持力过小夹不紧工件和夹持力过大对工件造成伤害,使用方便,有利于大范围的
手动夹取装置.pdf
一种手动夹取装置,包括夹持器、支撑管、柔性连接件和转动机构,夹持器包括固定管、设置在固定管中的张开状态保持机构及与固定管的一端连接的夹持机构,夹持机构与张开状态保持机构的一端连接,支撑管的一端与转动机构连接,支撑管的另一端与夹持器的固定管的另一端固定连接,柔性连接件设置在支撑管中,且柔性连接件的一端与转动机构固定连接,柔性连接件的另一端与夹持器的张开状态保持机构的另一端固定连接,转动机构以转动方式使柔性连接件拉动张开状态保持机构,以控制夹持机构的夹持工作。失主可以利用手动夹取装置来夹取掉落在狭小空间中的物

旋转夹取装置.pdf
本发明涉及机械设备领域,尤其是一种旋转夹取装置,它包括基座、机械手和夹爪,在基座上设置有环形固定座,环形固定座相对于基座可自由转动,所述的机械手的端部设置有可自由夹取的夹爪,所述的机械手的数量为若干个,机械手间隔均匀的设置在环形固定座的外壁上,所述的环形固定座的内壁设置有内齿,在基座内部设置有电动机,电动机的输出轴上设置有齿轮,所述的齿轮与环形固定座的内齿配合。该旋转夹取装置,其可提高机械手夹取的效率,减少无用功的产生,且使其连贯性更好,运行更加稳定。
缸盖夹取装置.pdf
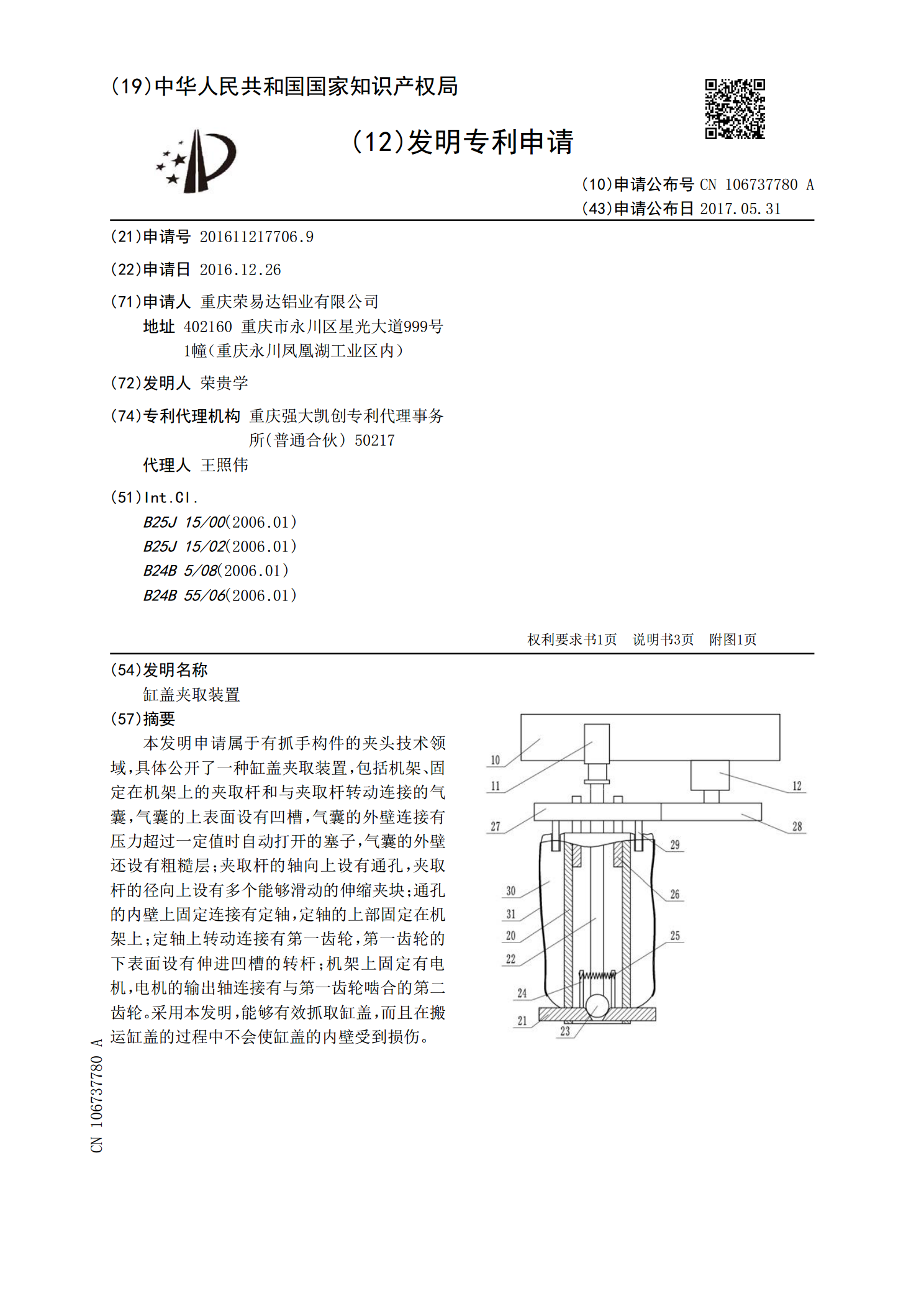
本发明申请属于有抓手构件的夹头技术领域,具体公开了一种缸盖夹取装置,包括机架、固定在机架上的夹取杆和与夹取杆转动连接的气囊,气囊的上表面设有凹槽,气囊的外壁连接有压力超过一定值时自动打开的塞子,气囊的外壁还设有粗糙层;夹取杆的轴向上设有通孔,夹取杆的径向上设有多个能够滑动的伸缩夹块;通孔的内壁上固定连接有定轴,定轴的上部固定在机架上;定轴上转动连接有第一齿轮,第一齿轮的下表面设有伸进凹槽的转杆;机架上固定有电机,电机的输出轴连接有与第一齿轮啮合的第二齿轮。采用本发明,能够有效抓取缸盖,而且在搬运缸盖的过程