
变轴距可越障工业机器人全向底盘.pdf

沛芹****ng

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
变轴距可越障工业机器人全向底盘.pdf
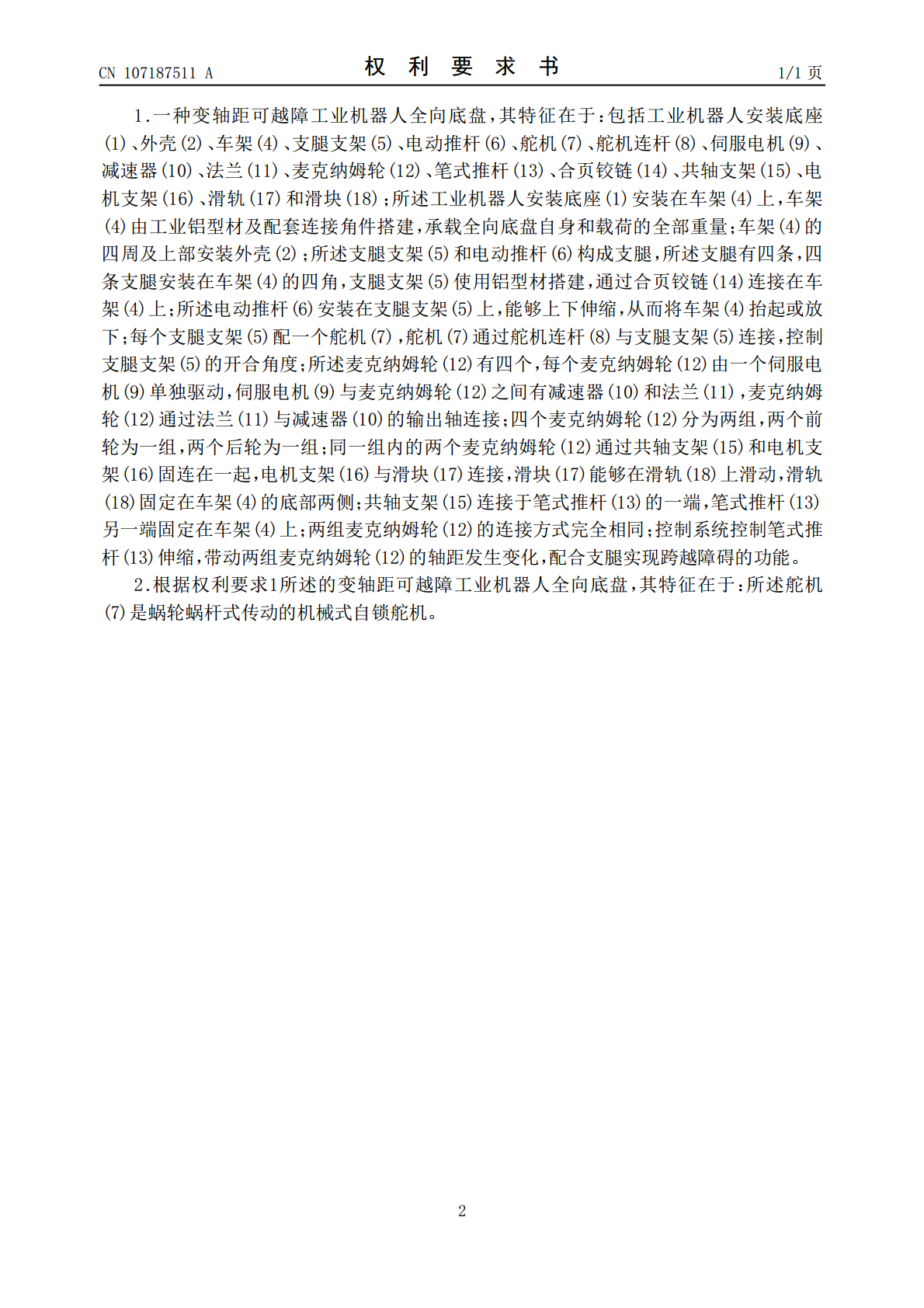
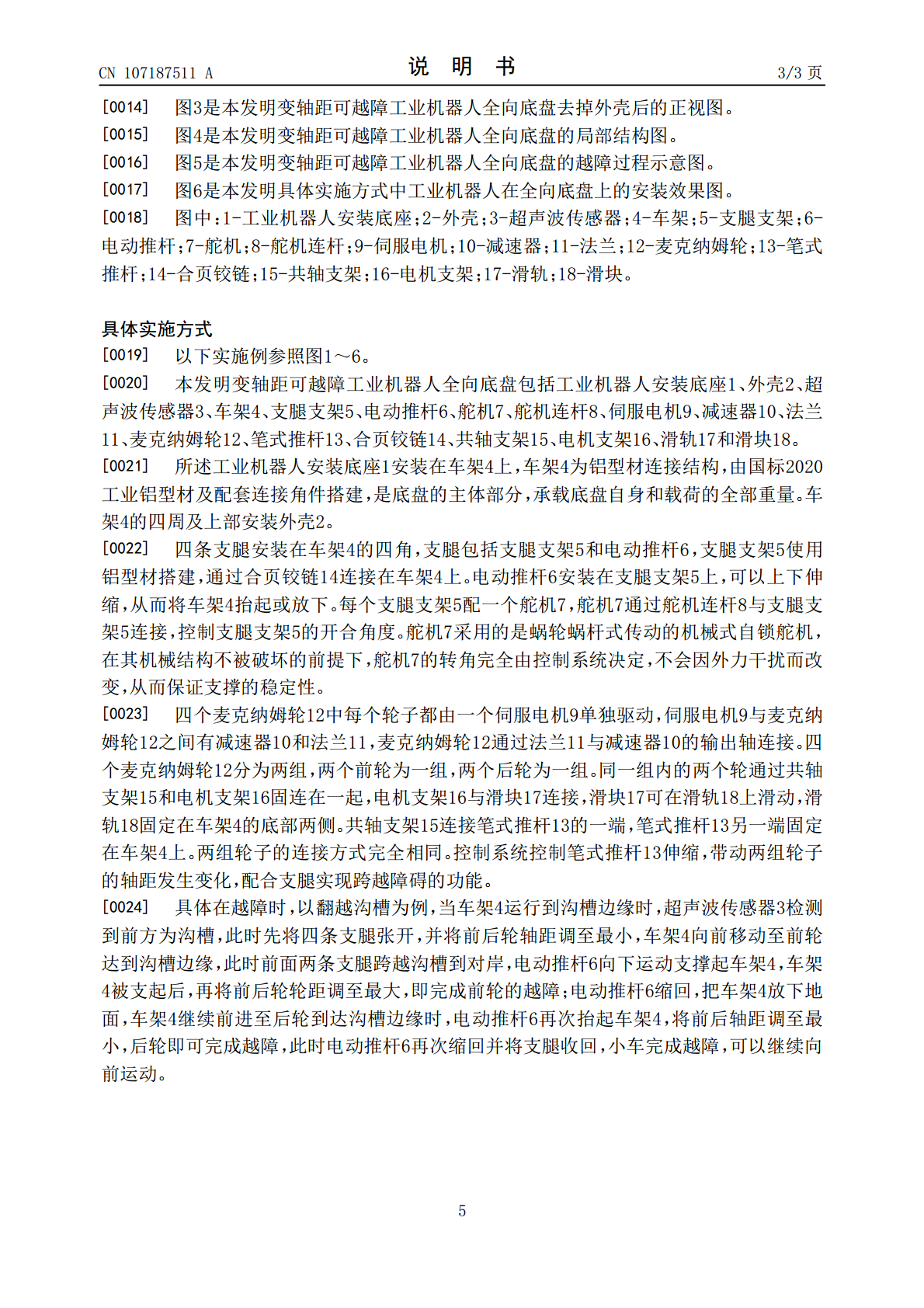
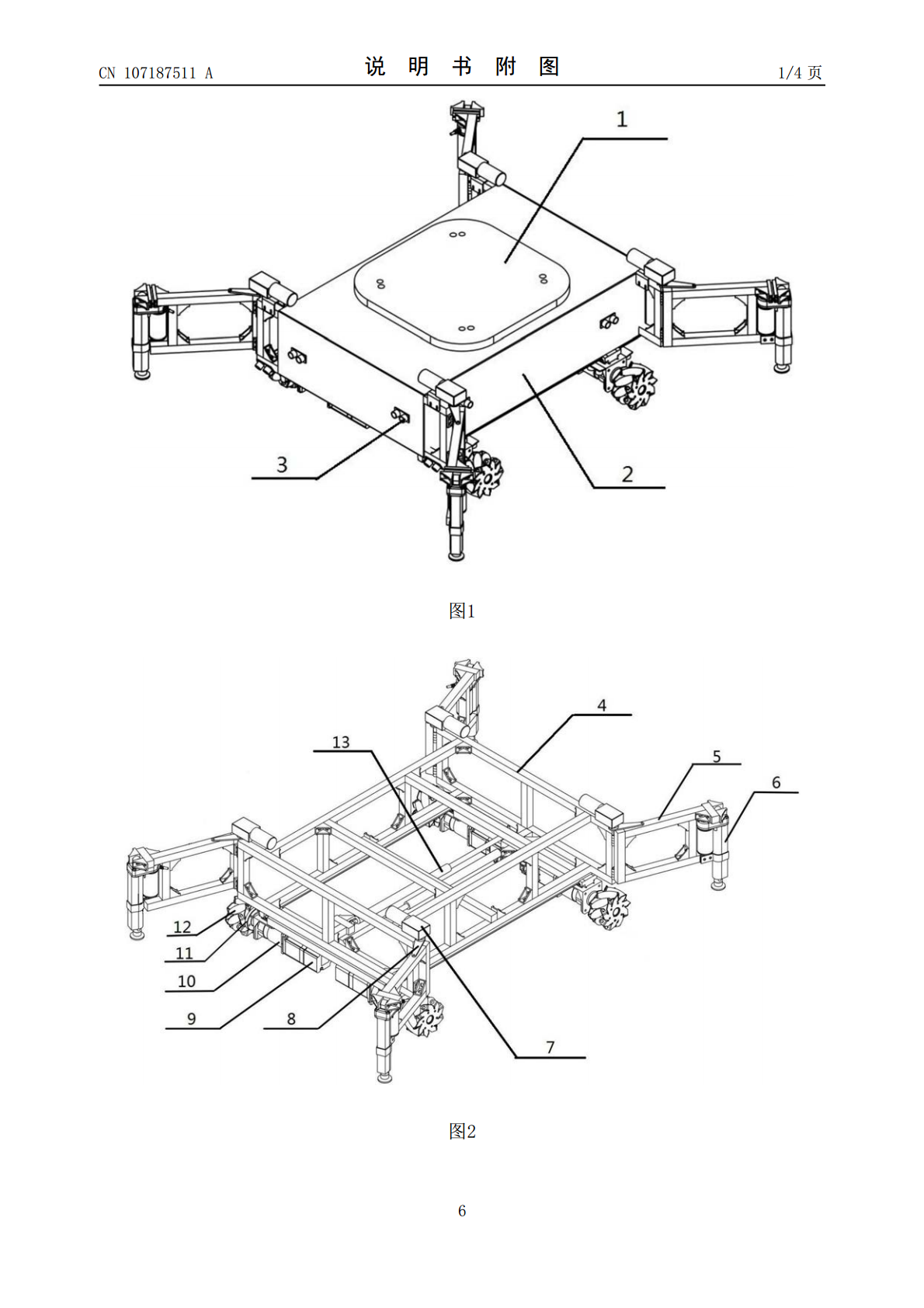
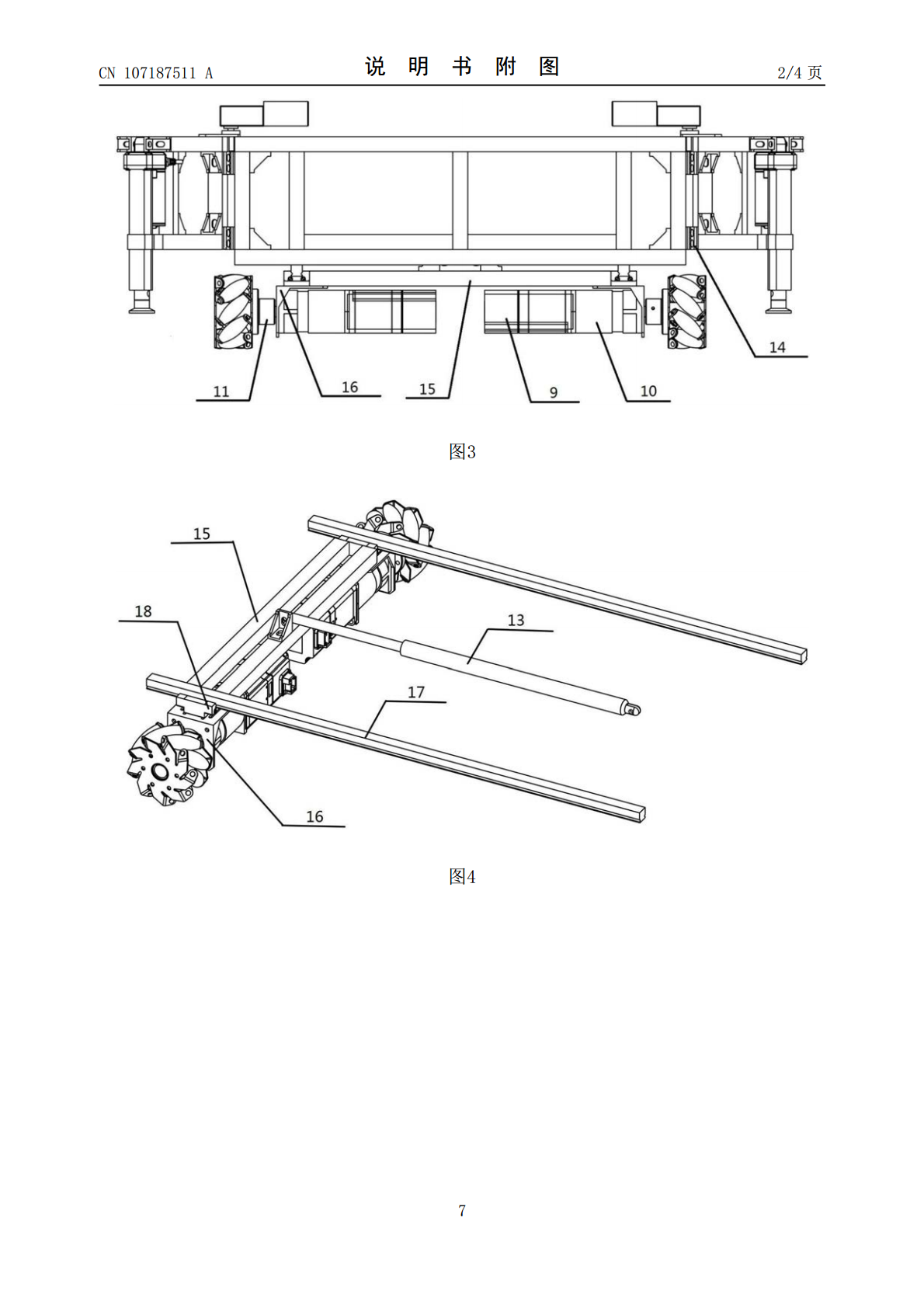
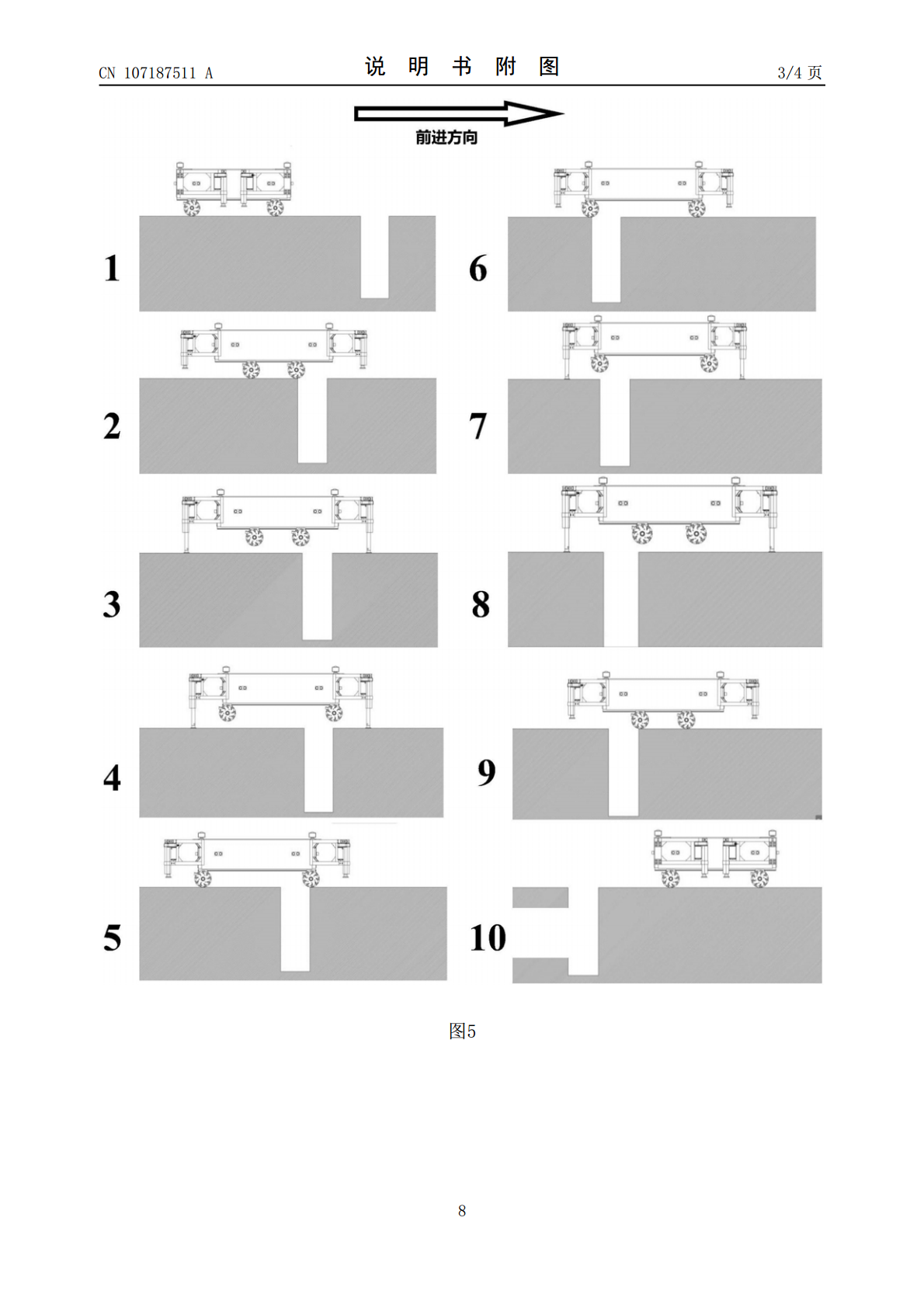
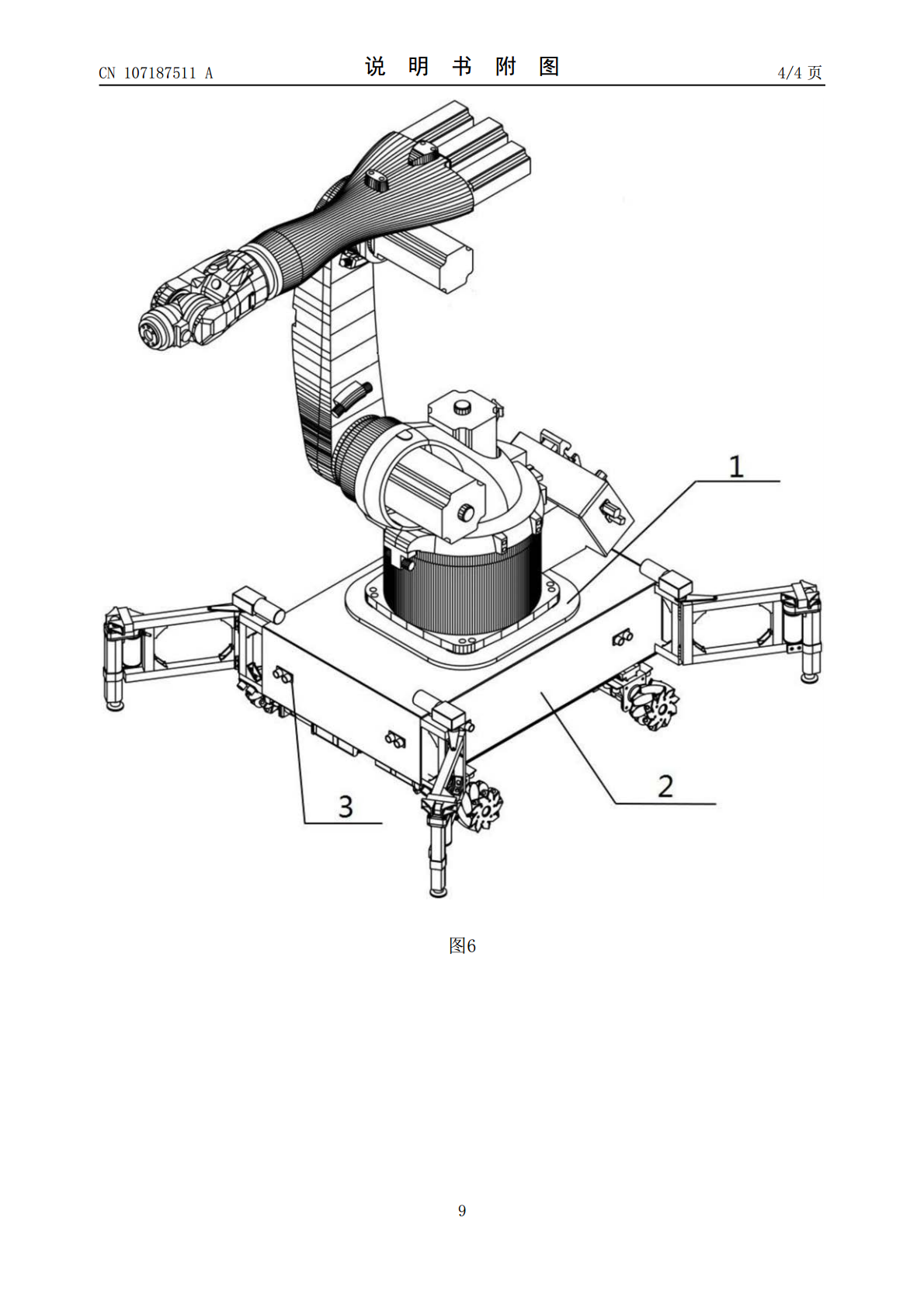
本发明公开了一种变轴距可越障工业机器人全向底盘,用于解决现有工业机器人全向底盘越障能力差的技术问题。技术方案是全向底盘前后轮轴距可以改变。此外,底盘的四角各安装有一条支腿。支腿在不使用的情况下可以折叠以减小所占空间,需要使用时则可以张开。支腿张开后,可以向下伸长从而将底盘整体抬离地面。遇到障碍时,支腿先张开迈过障碍,并将底盘整体抬离地面,此时改变轴距,以使轮子越过障碍,越障完成后,将支腿收起,底盘落回地面,可以继续移动。以此,本发明实现了工业机器人全向底盘的越障功能。
一种变轴距机器人底盘的动态控制方法.pdf
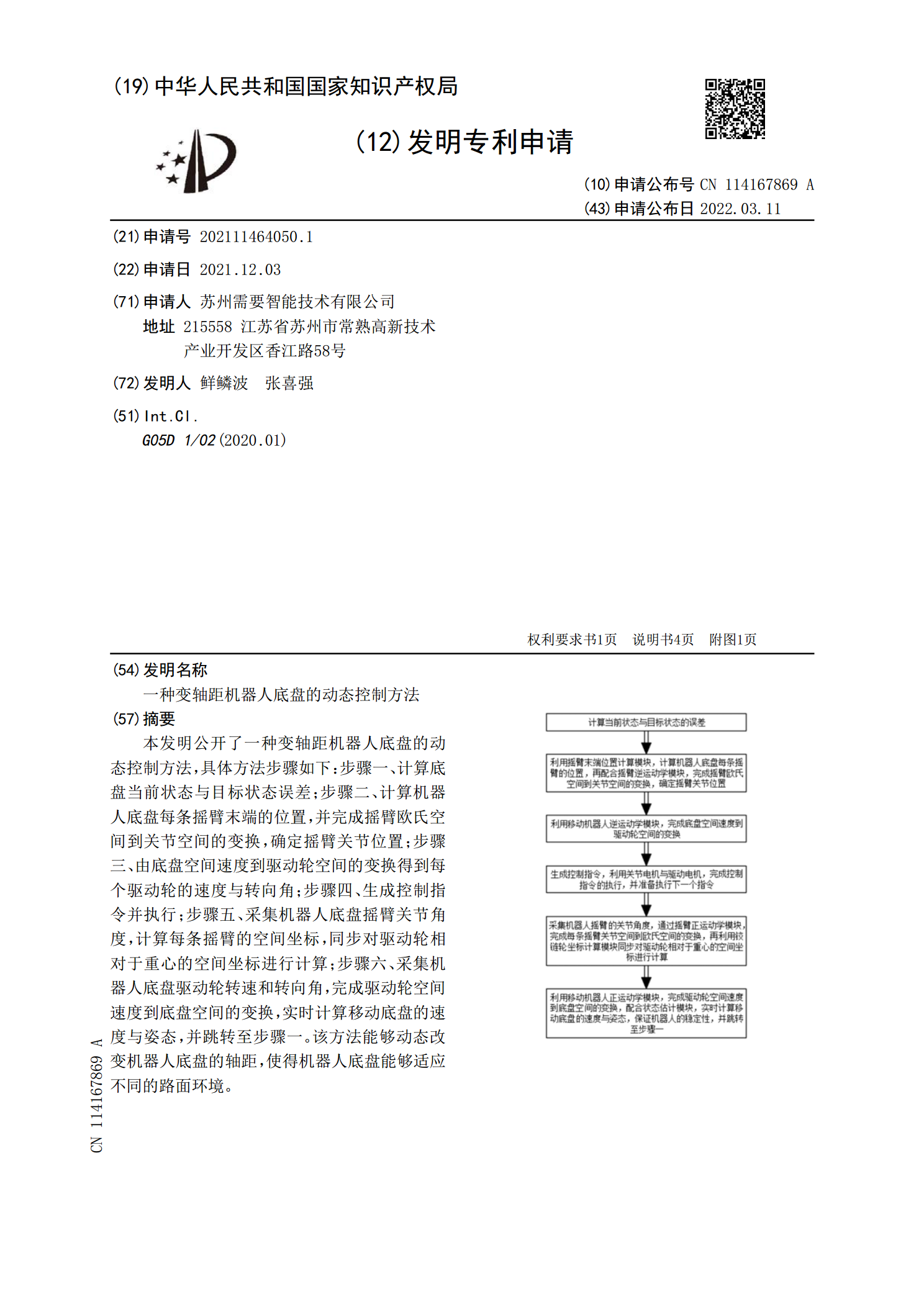
本发明公开了一种变轴距机器人底盘的动态控制方法,具体方法步骤如下:步骤一、计算底盘当前状态与目标状态误差;步骤二、计算机器人底盘每条摇臂末端的位置,并完成摇臂欧氏空间到关节空间的变换,确定摇臂关节位置;步骤三、由底盘空间速度到驱动轮空间的变换得到每个驱动轮的速度与转向角;步骤四、生成控制指令并执行;步骤五、采集机器人底盘摇臂关节角度,计算每条摇臂的空间坐标,同步对驱动轮相对于重心的空间坐标进行计算;步骤六、采集机器人底盘驱动轮转速和转向角,完成驱动轮空间速度到底盘空间的变换,实时计算移动底盘的速度与姿态,
一种全向移动的底盘、全向移动的底盘系统及机器人系统.pdf
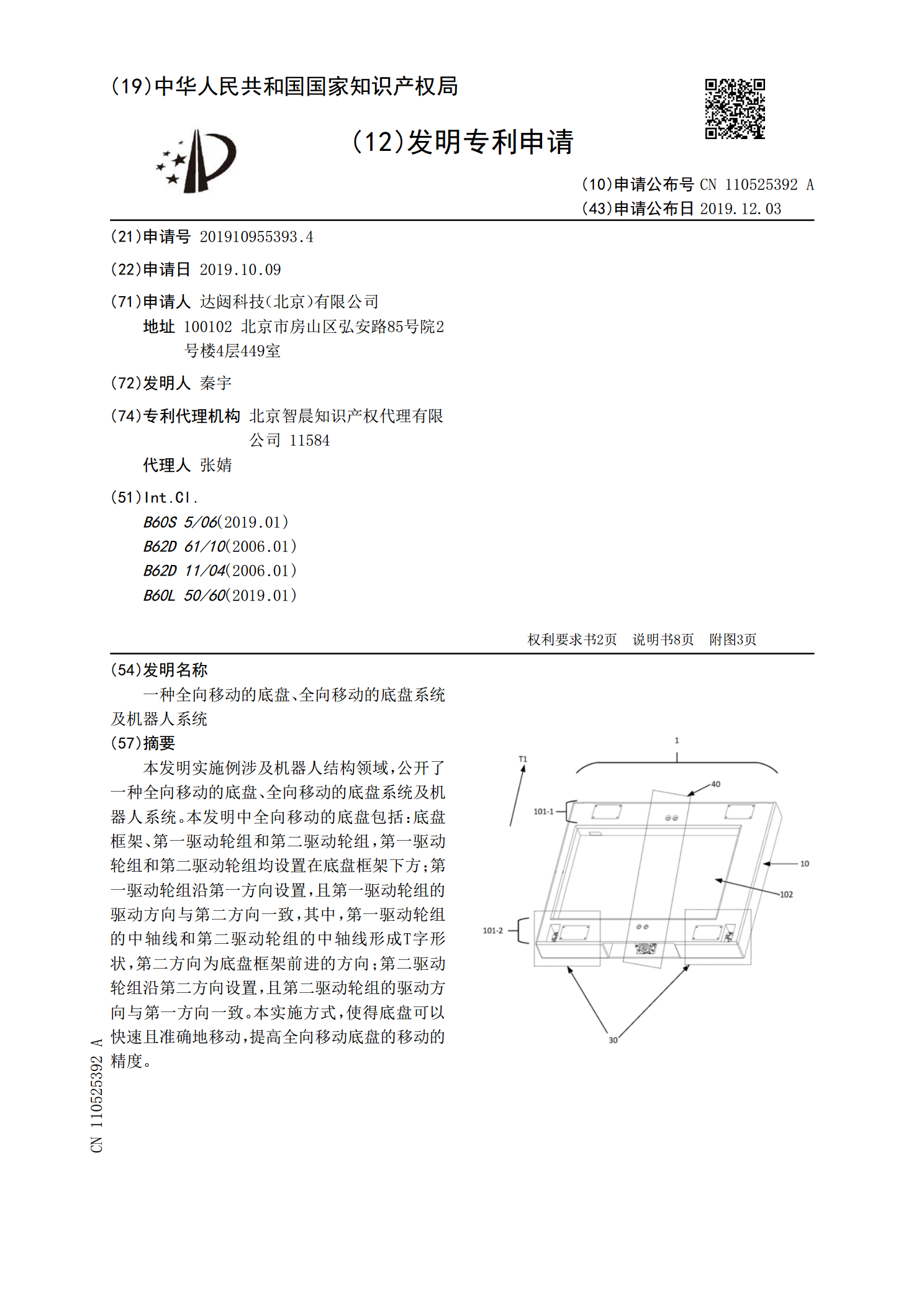
本发明实施例涉及机器人结构领域,公开了一种全向移动的底盘、全向移动的底盘系统及机器人系统。本发明中全向移动的底盘包括:底盘框架、第一驱动轮组和第二驱动轮组,第一驱动轮组和第二驱动轮组均设置在底盘框架下方;第一驱动轮组沿第一方向设置,且第一驱动轮组的驱动方向与第二方向一致,其中,第一驱动轮组的中轴线和第二驱动轮组的中轴线形成T字形状,第二方向为底盘框架前进的方向;第二驱动轮组沿第二方向设置,且第二驱动轮组的驱动方向与第一方向一致。本实施方式,使得底盘可以快速且准确地移动,提高全向移动底盘的移动的精度。
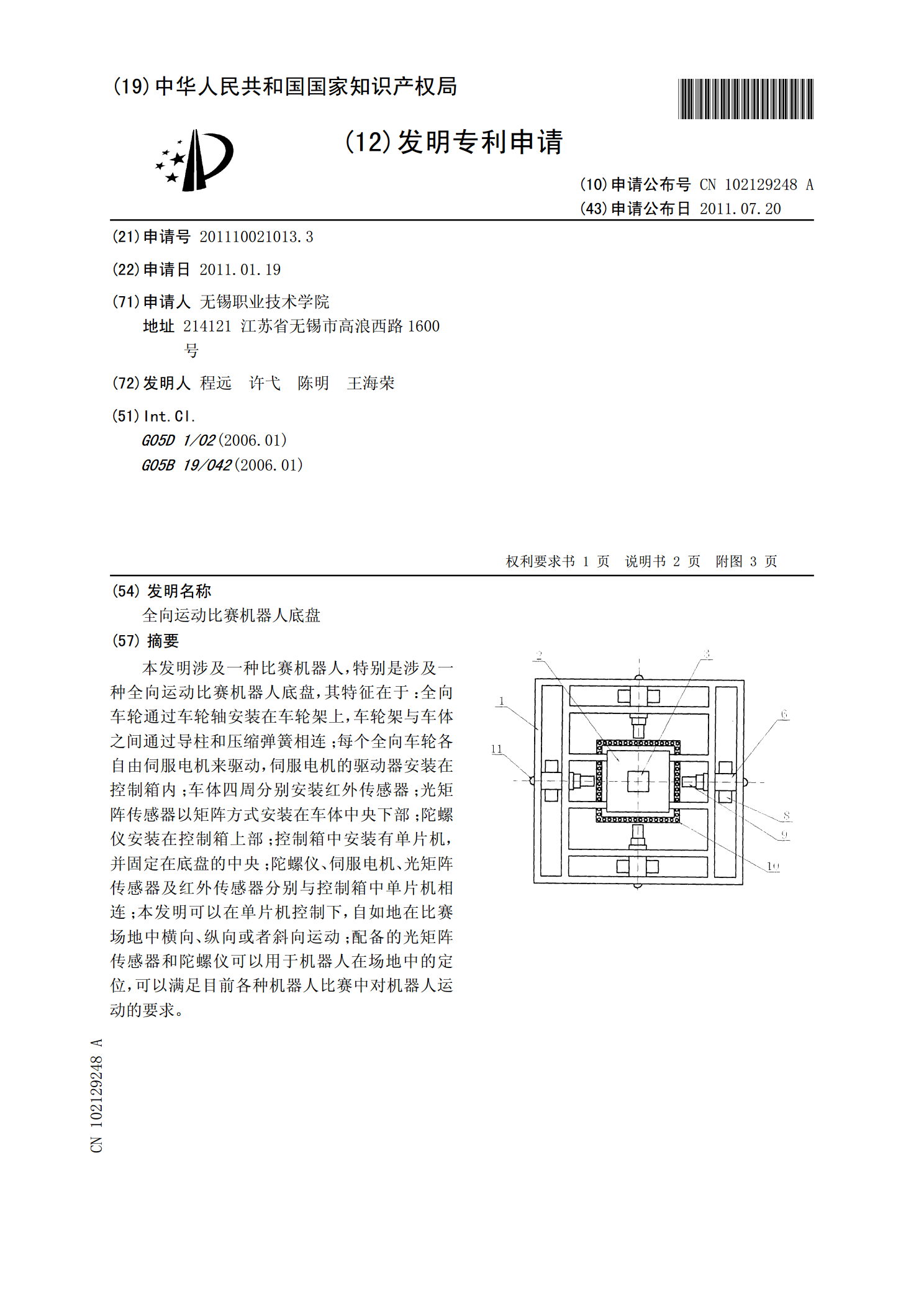
全向运动比赛机器人底盘.pdf
本发明涉及一种比赛机器人,特别是涉及一种全向运动比赛机器人底盘,其特征在于:全向车轮通过车轮轴安装在车轮架上,车轮架与车体之间通过导柱和压缩弹簧相连;每个全向车轮各自由伺服电机来驱动,伺服电机的驱动器安装在控制箱内;车体四周分别安装红外传感器;光矩阵传感器以矩阵方式安装在车体中央下部;陀螺仪安装在控制箱上部;控制箱中安装有单片机,并固定在底盘的中央;陀螺仪、伺服电机、光矩阵传感器及红外传感器分别与控制箱中单片机相连;本发明可以在单片机控制下,自如地在比赛场地中横向、纵向或者斜向运动;配备的光矩阵传感器和陀
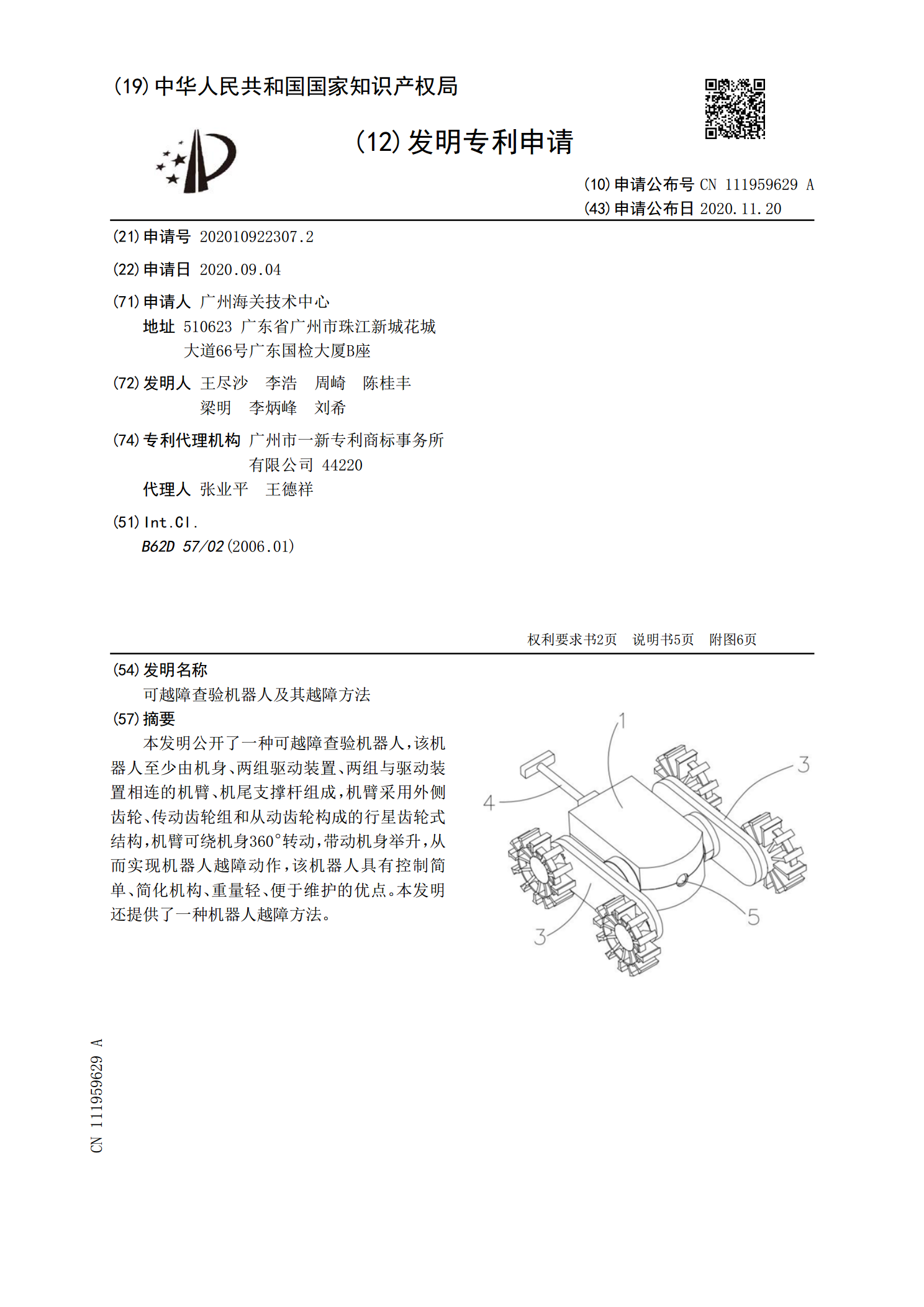
可越障查验机器人及其越障方法.pdf
本发明公开了一种可越障查验机器人,该机器人至少由机身、两组驱动装置、两组与驱动装置相连的机臂、机尾支撑杆组成,机臂采用外侧齿轮、传动齿轮组和从动齿轮构成的行星齿轮式结构,机臂可绕机身360°转动,带动机身举升,从而实现机器人越障动作,该机器人具有控制简单、简化机构、重量轻、便于维护的优点。本发明还提供了一种机器人越障方法。