
基于双水平传感器的平台调平控制系统和调控方法.pdf

一条****发啊


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双水平传感器的平台调平控制系统和调控方法.pdf
本发明公开了一种基于双水平传感器的平台调平控制系统和控制方法,包括平台本体以及可伸缩的左前支腿、右前支腿、左后支腿和右后支腿;平台本体靠近前端位置处设有第一水平传感器,靠近后端位置处设有第二水平传感器,第一水平传感器和第二水平传感器通过线缆与控制器连接并受其调控;左前支腿、右前支腿、左后支腿和右后支腿均通过线缆与控制器连接,且通过控制器调控各个支腿伸缩。本发明的平台调平控制系统和控制方法,实现了对大型工作平台的自动快速精准调平,并可以有效对大型平台的形变进行自动感应补偿,自动调平后无需人员手动补偿,解决了
平台调平系统和方法.pdf
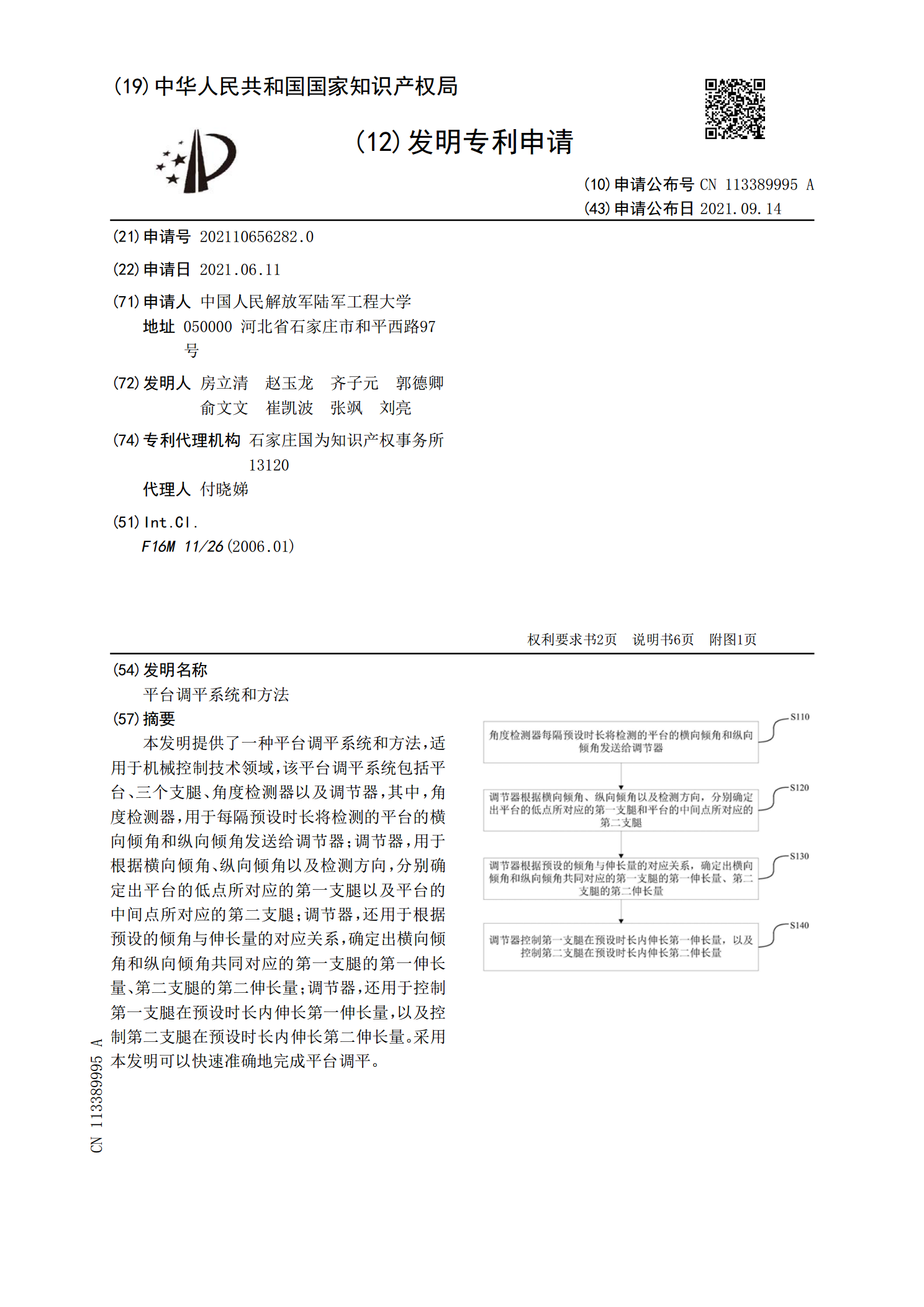
本发明提供了一种平台调平系统和方法,适用于机械控制技术领域,该平台调平系统包括平台、三个支腿、角度检测器以及调节器,其中,角度检测器,用于每隔预设时长将检测的平台的横向倾角和纵向倾角发送给调节器;调节器,用于根据横向倾角、纵向倾角以及检测方向,分别确定出平台的低点所对应的第一支腿以及平台的中间点所对应的第二支腿;调节器,还用于根据预设的倾角与伸长量的对应关系,确定出横向倾角和纵向倾角共同对应的第一支腿的第一伸长量、第二支腿的第二伸长量;调节器,还用于控制第一支腿在预设时长内伸长第一伸长量,以及控制第二支腿

基于DSP车载平台自动调平控制系统的研究.pptx
基于DSP车载平台自动调平控制系统的研究目录添加章节标题研究背景与意义背景介绍研究意义研究目的系统概述系统组成工作原理技术特点DSP车载平台设计硬件设计软件设计平台测试自动调平控制系统设计控制策略控制算法系统实现实验与验证实验设备与条件实验过程与结果结果分析结论与展望研究成果总结未来研究方向THANKYOU

基于复杂环境下车载平台调平控制系统的研究.docx
基于复杂环境下车载平台调平控制系统的研究基于复杂环境下车载平台调平控制系统的研究摘要:车载平台是现代智能交通系统的重要组成部分。在复杂环境下,车载平台需要保持稳定,以确保乘客和货物的安全。本论文主要研究了基于复杂环境下车载平台的调平控制系统,通过分析和设计系统的工作原理和功能,提出了一种可行的解决方案。关键词:车载平台,复杂环境,调平控制系统,稳定性,解决方案引言随着交通需求的增加,车载平台的稳定性成为一个越来越重要的问题。在复杂环境下,如崎岖的道路、高风险区域等,车载平台的稳定性对于乘客和货物的安全至关

一种火箭发射平台的调平控制系统及方法.pdf
本发明公开了一种火箭发射平台的调平控制系统及方法。火箭发射平台的调平控制系统包括:第一检测器,设置在火箭发射平台的可活动支腿上,用于反馈可活动支腿的长度;第二检测器,用于检测火箭发射平台相对于第一轴的第一倾角和相对于第二轴的第二倾角;控制模块,利用第一倾角和第二倾角计算可活动支腿需要调整的距离,并控制可活动支腿调整至平台满足精度要求。通过该火箭发射平台的调平控制系统能够快速准确地完成发射平台的调平,利用第二检测器判断两个轴向的倾角,控制模块计算各个可活动支腿需要调整的距离,通过第一检测器调整相应距离,控制