
基于北斗定位系统的水下定位方法.pdf

永梅****33

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于北斗定位系统的水下定位方法.pdf
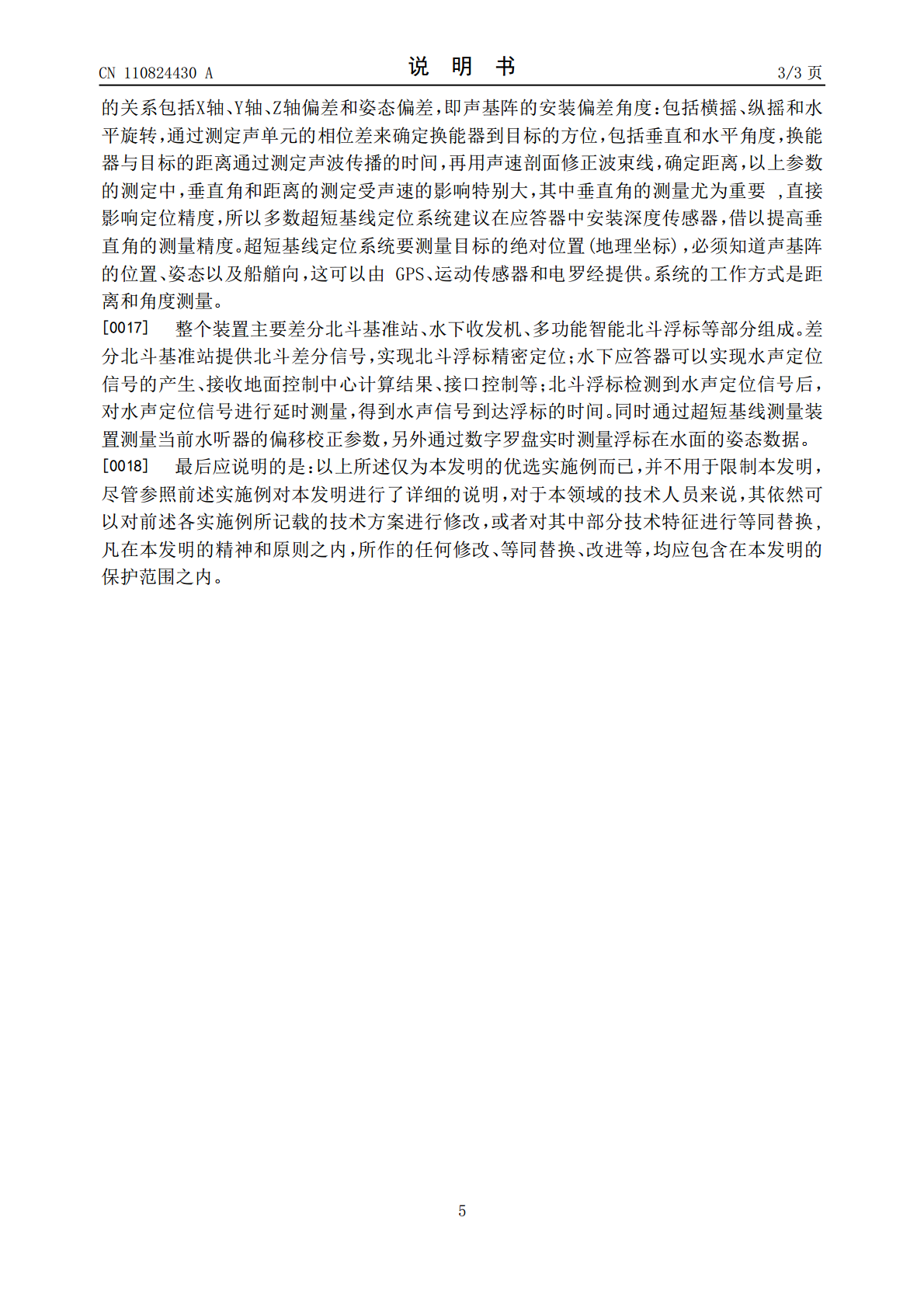
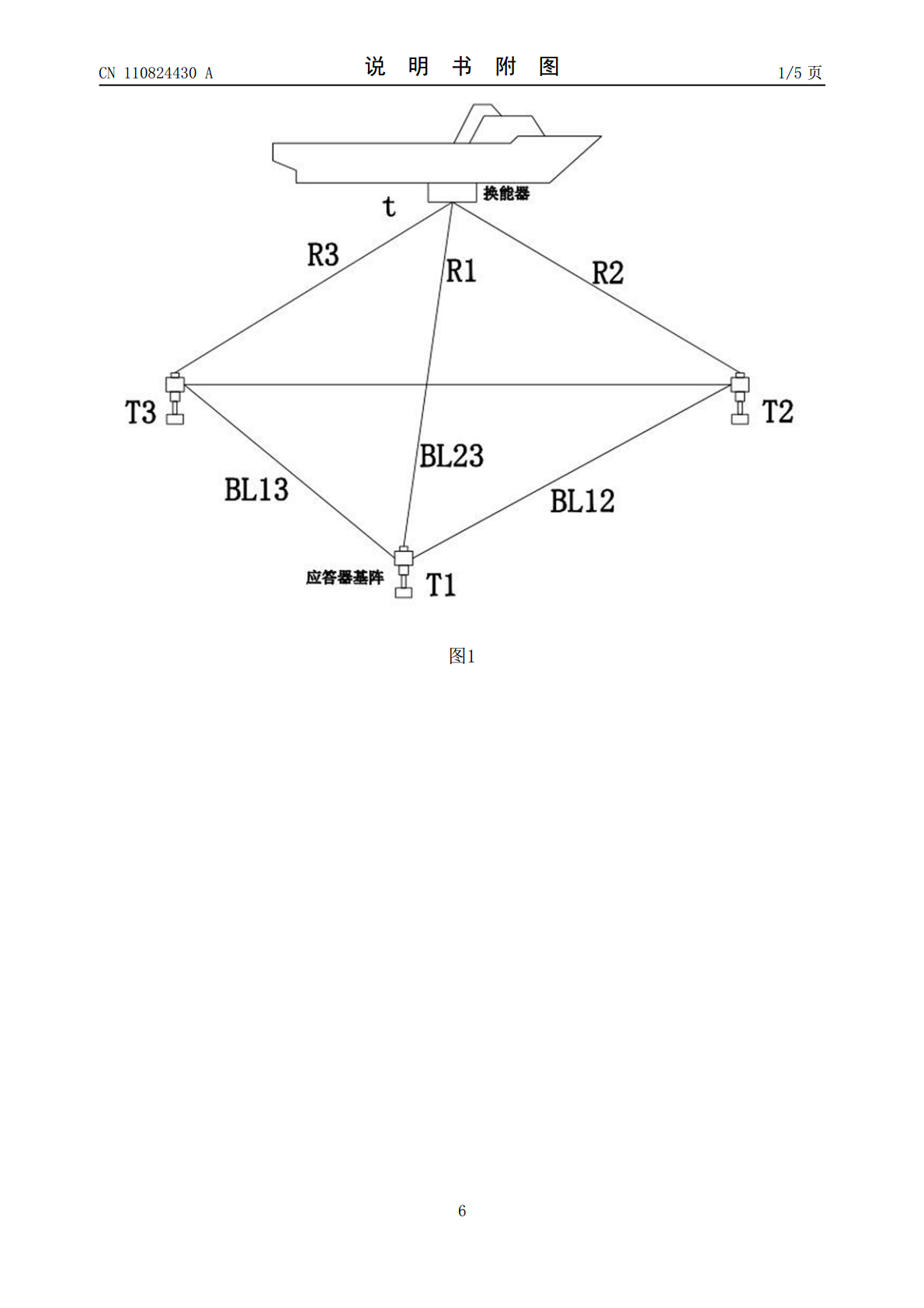
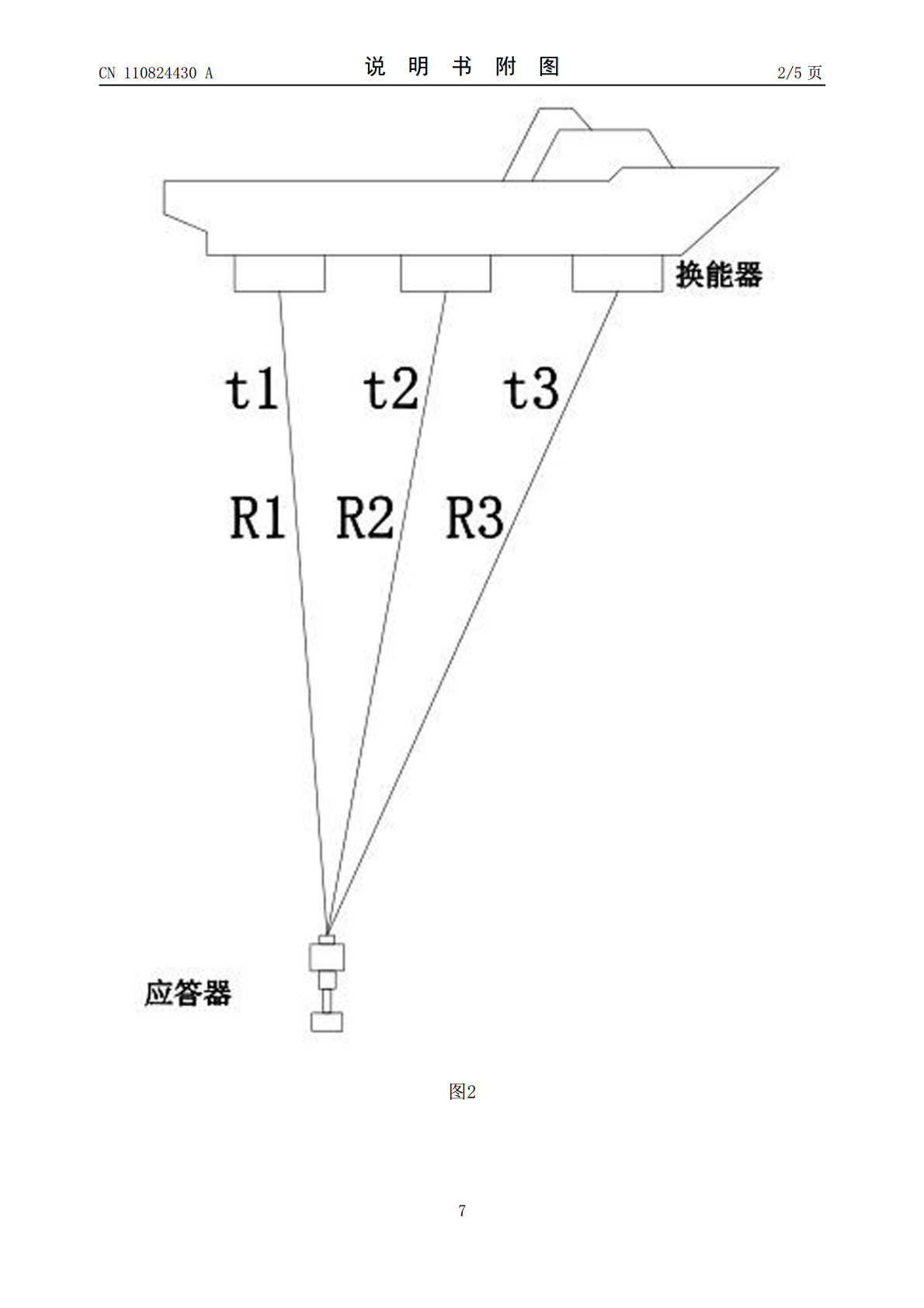
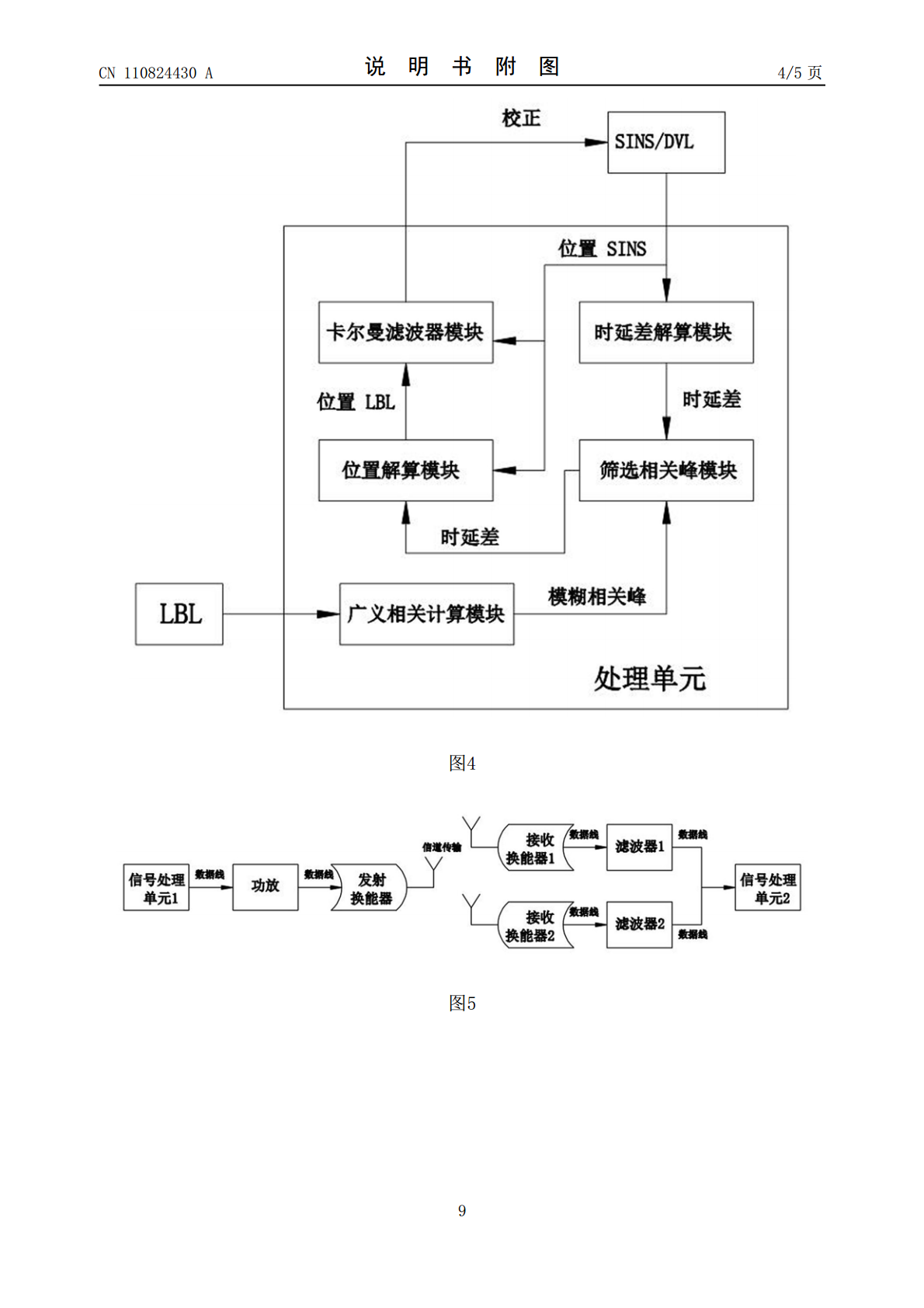
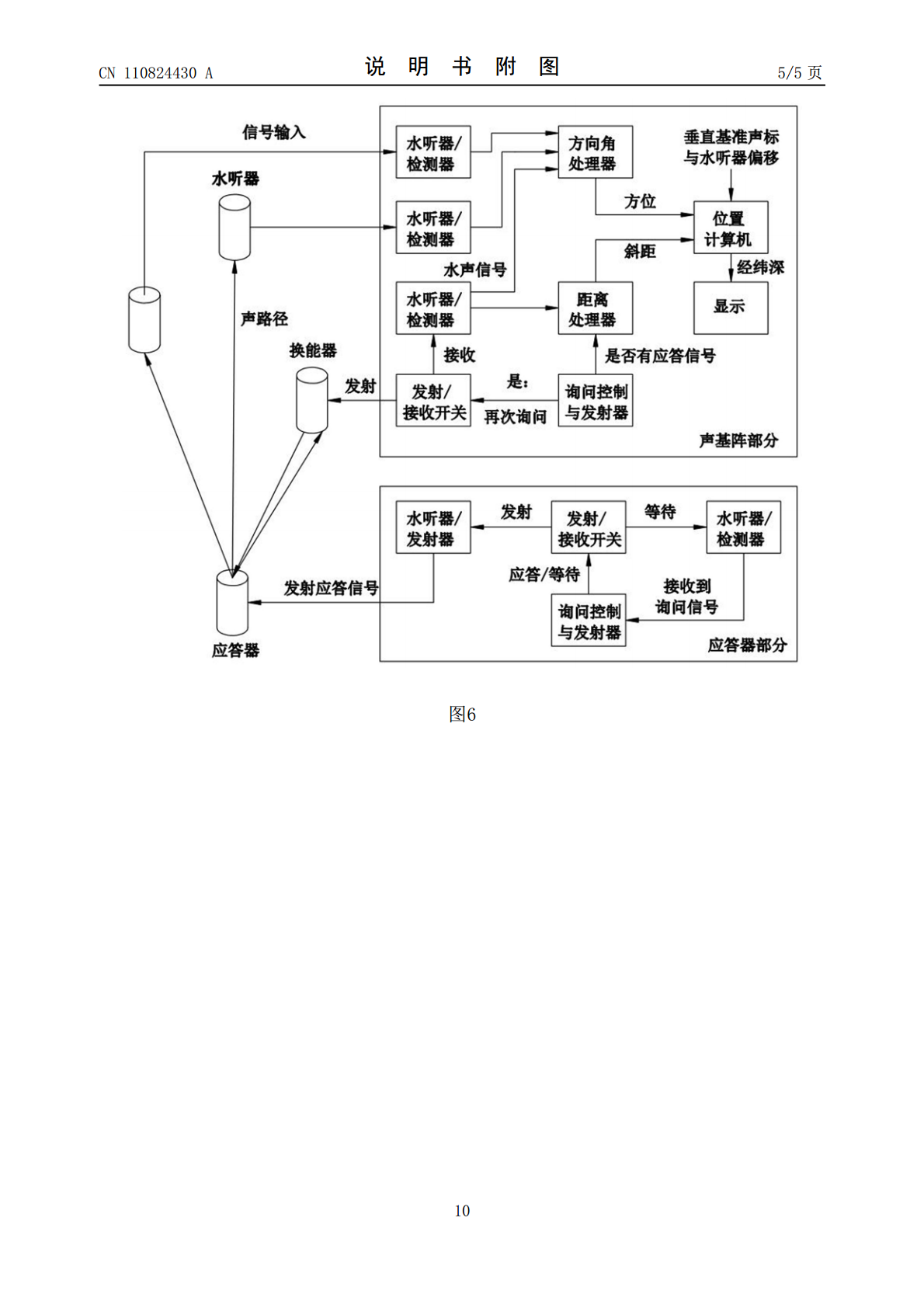
本发明公开了一种基于北斗定位系统的水下定位方法,包括如下操作步骤:S1:长基线定位:将换能器安装在船体上,向位置已知的固定在海底的应答器发出测量信号;S2:短基线定位:将3个以上换能器固定在船体上组成声基阵,由声基阵内的一个换能器向应答器发出测量信号,测量信号经应答器接收后反馈发送至声基阵内所有换能器;S3:超短基线定位:超短基线的所有声单元集中安装在一个收发器中,组成声基阵,通过测定声单元的相位差来确定换能器到目标的方位。本发明可以通过北斗提供实时高精度的空间坐标基准,对于水下跟踪、导航应用,通过浮标北
一种基于北斗系统的授时定位系统及其授时定位方法.pdf
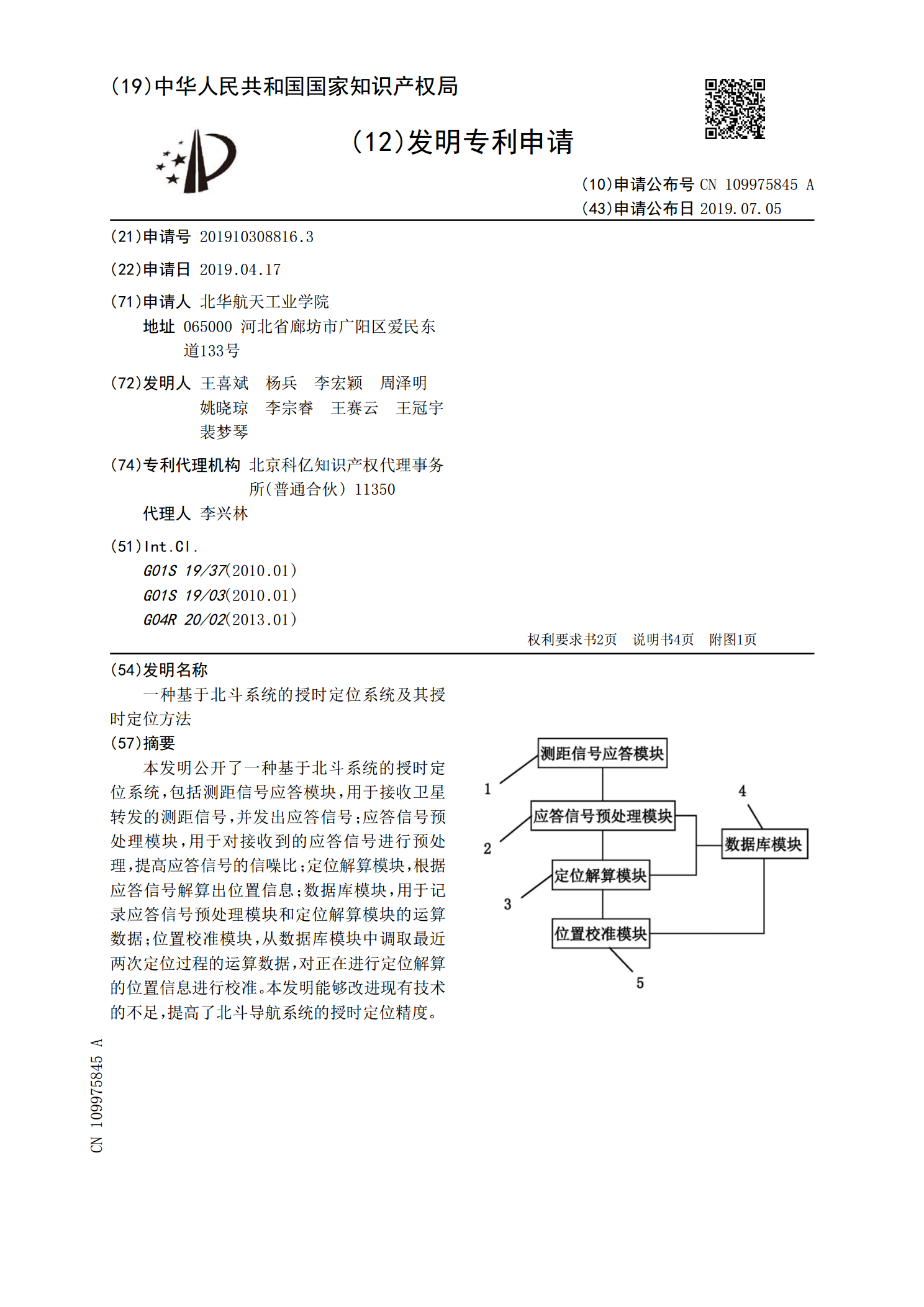
本发明公开了一种基于北斗系统的授时定位系统,包括测距信号应答模块,用于接收卫星转发的测距信号,并发出应答信号;应答信号预处理模块,用于对接收到的应答信号进行预处理,提高应答信号的信噪比;定位解算模块,根据应答信号解算出位置信息;数据库模块,用于记录应答信号预处理模块和定位解算模块的运算数据;位置校准模块,从数据库模块中调取最近两次定位过程的运算数据,对正在进行定位解算的位置信息进行校准。本发明能够改进现有技术的不足,提高了北斗导航系统的授时定位精度。

基于单片机的北斗定位系统.docx
广东东软学院本科生毕业设计(论文)本科毕业设计(论文)基于单片机的北斗定位系统的设计DesignofBeidoupositioningsystembasedonsinglechipmicrocomputer院(系)计算机科学与技术专业电子信息工程班级16电子本3班学号16210420315学生姓名王一锦指导教师陈桂宏提交日期2020年5月
辅助北斗卫星定位系统及基于该系统的定位追踪终端.pdf
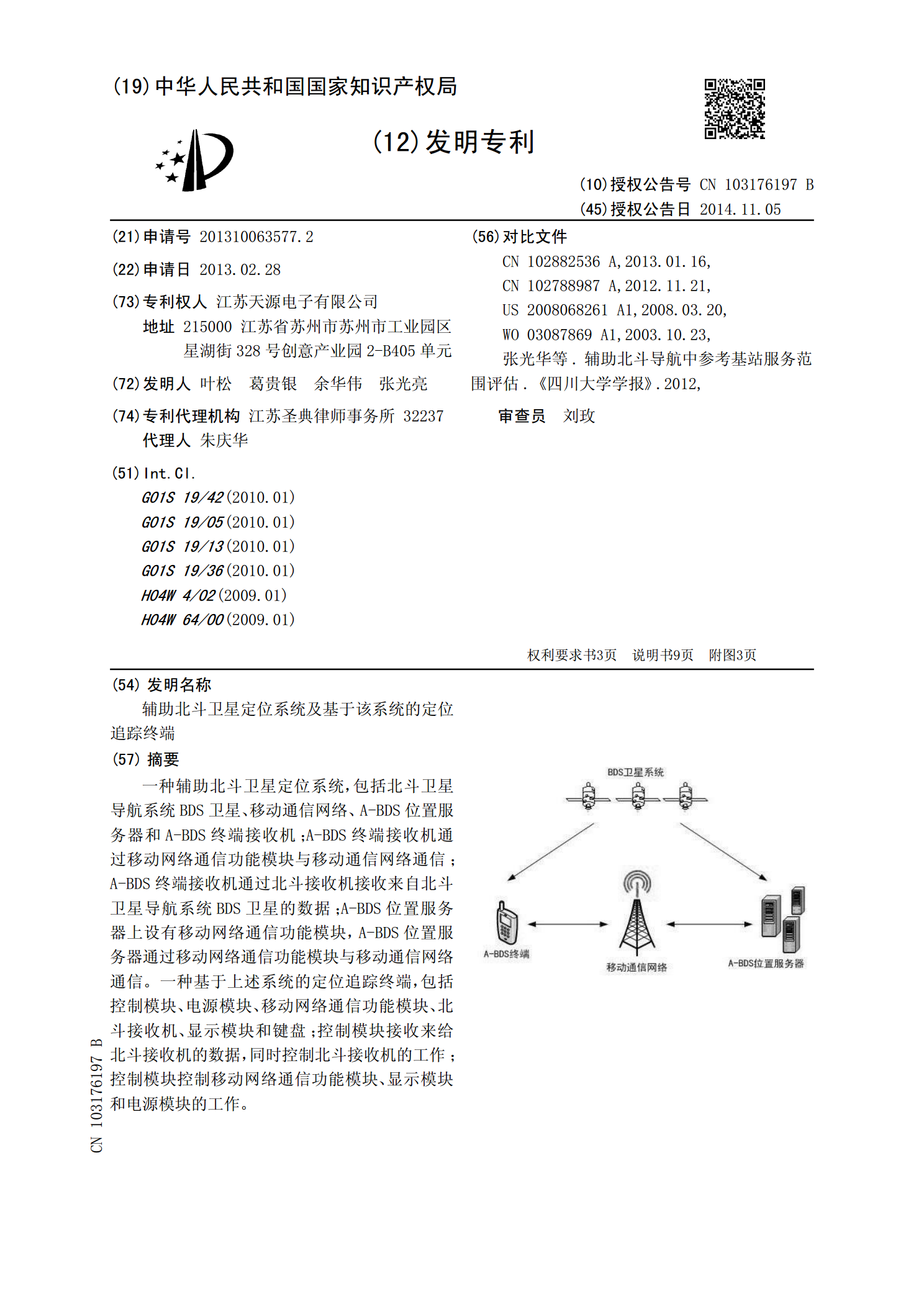
一种辅助北斗卫星定位系统,包括北斗卫星导航系统BDS卫星、移动通信网络、A-BDS位置服务器和A-BDS终端接收机;A-BDS终端接收机通过移动网络通信功能模块与移动通信网络通信;A-BDS终端接收机通过北斗接收机接收来自北斗卫星导航系统BDS卫星的数据;A-BDS位置服务器上设有移动网络通信功能模块,A-BDS位置服务器通过移动网络通信功能模块与移动通信网络通信。一种基于上述系统的定位追踪终端,包括控制模块、电源模块、移动网络通信功能模块、北斗接收机、显示模块和键盘;控制模块接收来给北斗接收机的数据,同

基于北斗卫星定位的预警系统.doc
北京理工大学珠海学院2020届本科生毕业设计基于北斗卫星定位的预警系统学院:工业自动化学院专业:机械电子工程姓名:鲍志远学号:15040414951指导老师:陈婷职称:教师中国·珠海二○二○年五月诚信承诺书本人郑重承诺:本人所呈交的毕业论文《基于北斗卫星定位的预警系统》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,论文使用的数据真实可靠。承诺人签名:日期:年月日基于北斗卫星定位的预警系统摘要北斗全体系的建设开始于1994年,在20年来技术持续迭代、高