
基于磁悬浮随动的悬吊重力补偿装置.pdf

一吃****瀚文


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于磁悬浮随动的悬吊重力补偿装置.pdf
一种基于磁悬浮随动的悬吊重力补偿装置,其主要包括磁悬浮驱动补偿系统和悬吊补偿系统,磁悬浮驱动补偿系统包括磁悬浮驱动模块、磁悬浮导轨,磁悬浮导轨上分别设两个磁悬浮驱动模块;所述悬吊补偿系统包括悬吊架、悬吊恒力控制模块和位置伺服模块,悬吊架的四条支腿分别与上述磁悬浮驱动模块固连,两个位置伺服模块设在悬吊架上的滑轨上,并分别与两个悬吊恒力控制模块垂直连接;所述位置伺服模块包括两个X向移动滑块、Y向移动滑块、伺服电机、丝杠和两个辅助导杆;所述悬吊恒力控制模块包括直流电机、卷扬筒、钢丝绳、角度传感器、拉力传感器。本

一种重力平衡悬吊随动装置、系统及其工作方法.pdf
本发明公开了一种重力平衡悬吊随动装置、系统及其工作方法,该装置包括系统支架、Y向运动机构、X向运动机构、重力方向悬吊机构。重力方向悬吊机构包含电机齿轮箱组合、卷绕轮、力传感器、缓冲缸、缓冲弹簧、缓冲导向杆、换向缓冲滑轮、导向轮、钢丝绳、吊丝牵引柄、X向倾角传感器、Y向倾角传感器、倾角传感器支架。中间的换向缓冲滑轮将钢丝绳的拉力合成为压力施加到力传感器上;缓冲缸内的缓冲弹簧能够以被动的方式快速响应空间机构位移通过钢丝绳导致的压力的变化。该主动和被动相结合的悬吊机构和系统,将拉力传感器固定在悬吊机构上,解决了

一种人体测量及训练用随动悬吊式低重力模拟装置.pdf
一种人体测量及训练用随动悬吊式低重力模拟装置,包括:支撑框架、悬吊系统和移动平台;所述支撑框架用于支撑并为所述悬吊系统和移动平台提供安装接口;所述悬吊系统安装于所述移动平台上,用于通过悬吊方式抵消部分重力;所述移动平台安装在所述支撑框架上,用于为所述悬吊系统提供水平移动的平台。该装置通过滑轮组合将减重装置与移动平台有机结合,解决了常见悬吊式低重力模拟装置无法随动的难题。此外,该装置选用配重或弹力绳两种方式抵消重力,可以根据使用者体重方便快捷地调节,配合拉力传感器可以精确实现不同低重力水平的模拟。
基于随动磨削的共轭凸轮误差补偿装置.pdf
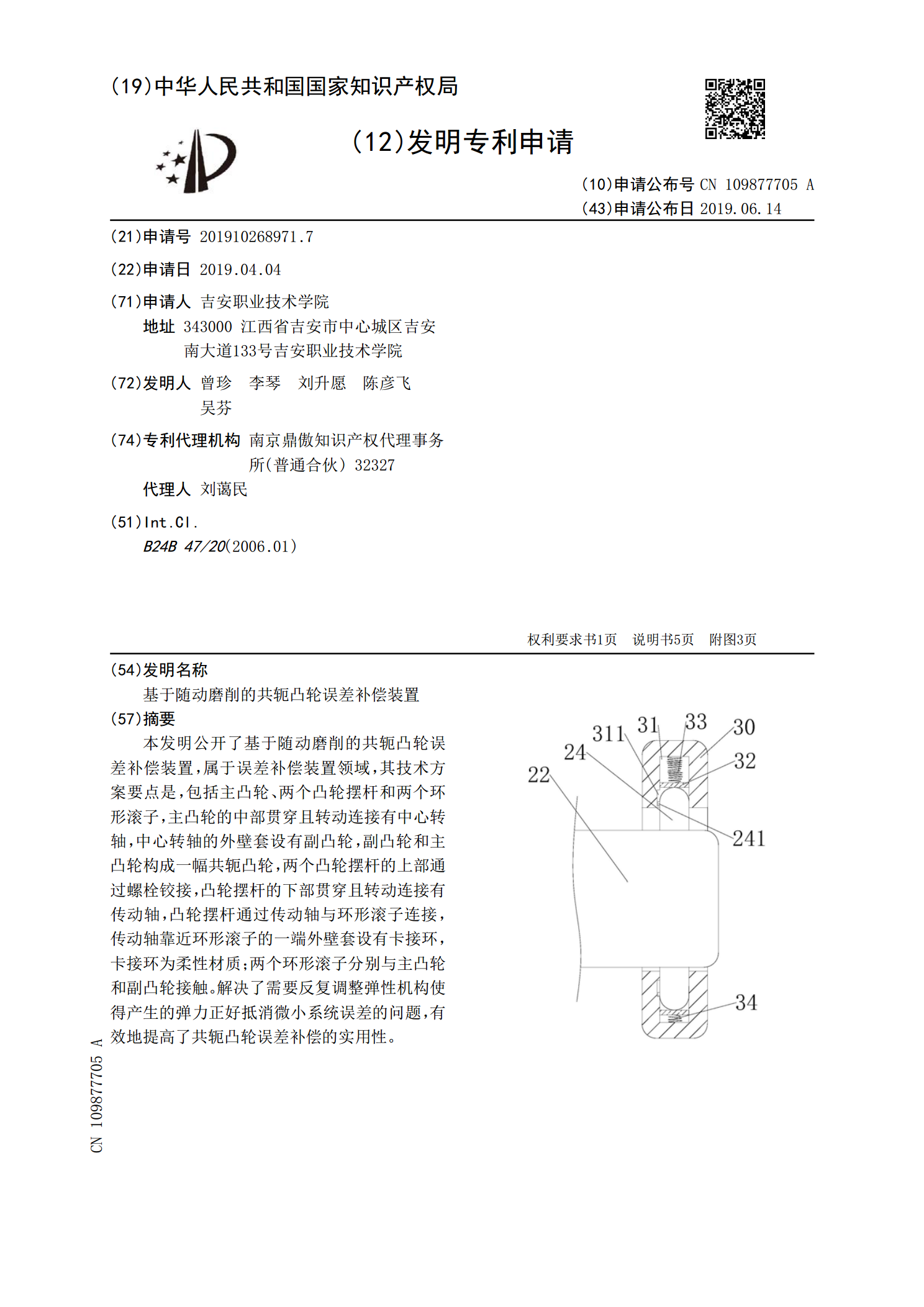
本发明公开了基于随动磨削的共轭凸轮误差补偿装置,属于误差补偿装置领域,其技术方案要点是,包括主凸轮、两个凸轮摆杆和两个环形滚子,主凸轮的中部贯穿且转动连接有中心转轴,中心转轴的外壁套设有副凸轮,副凸轮和主凸轮构成一幅共轭凸轮,两个凸轮摆杆的上部通过螺栓铰接,凸轮摆杆的下部贯穿且转动连接有传动轴,凸轮摆杆通过传动轴与环形滚子连接,传动轴靠近环形滚子的一端外壁套设有卡接环,卡接环为柔性材质;两个环形滚子分别与主凸轮和副凸轮接触。解决了需要反复调整弹性机构使得产生的弹力正好抵消微小系统误差的问题,有效地提高了共

随动式微重力平衡卸载装置.pdf
本发明提供一种随动式微重力平衡卸载装置,包括基座、加力系统、随动系统、六自由度调姿系统、工作平台,基座设置于底层,加力系统安装在基座的下表面,包括加力电机、减速器、卷扬筒、加力吊绳,电机和卷扬筒分别与减速器的输入轴和输出轴相连;随动系统位于基座上表面,包括固定支架、位置调整电机、丝杠、移动支架、移动导轨、定滑轮组、动滑轮、起吊吊绳、工作平台支撑架;六自由度调姿系统由六个结构相同的调姿分支构成;工作平台下表面连接调姿分支和工作平台支撑架,利用重力平衡原理,对工件调姿、施加平衡力后跟随工件运动,实现微重力环境