
随动式微重力平衡卸载装置.pdf

宏硕****mo


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

随动式微重力平衡卸载装置.pdf
本发明提供一种随动式微重力平衡卸载装置,包括基座、加力系统、随动系统、六自由度调姿系统、工作平台,基座设置于底层,加力系统安装在基座的下表面,包括加力电机、减速器、卷扬筒、加力吊绳,电机和卷扬筒分别与减速器的输入轴和输出轴相连;随动系统位于基座上表面,包括固定支架、位置调整电机、丝杠、移动支架、移动导轨、定滑轮组、动滑轮、起吊吊绳、工作平台支撑架;六自由度调姿系统由六个结构相同的调姿分支构成;工作平台下表面连接调姿分支和工作平台支撑架,利用重力平衡原理,对工件调姿、施加平衡力后跟随工件运动,实现微重力环境

一种重力平衡悬吊随动装置、系统及其工作方法.pdf
本发明公开了一种重力平衡悬吊随动装置、系统及其工作方法,该装置包括系统支架、Y向运动机构、X向运动机构、重力方向悬吊机构。重力方向悬吊机构包含电机齿轮箱组合、卷绕轮、力传感器、缓冲缸、缓冲弹簧、缓冲导向杆、换向缓冲滑轮、导向轮、钢丝绳、吊丝牵引柄、X向倾角传感器、Y向倾角传感器、倾角传感器支架。中间的换向缓冲滑轮将钢丝绳的拉力合成为压力施加到力传感器上;缓冲缸内的缓冲弹簧能够以被动的方式快速响应空间机构位移通过钢丝绳导致的压力的变化。该主动和被动相结合的悬吊机构和系统,将拉力传感器固定在悬吊机构上,解决了

一种全域自平衡重力卸载装置.pdf
本发明公开了一种全域自平衡重力卸载装置,其包括支撑架、悬挂装置、固定架、悬挂重物平台、三条结构完全相同的连接分支,三条分支对称分布连接固定平台和悬挂物体平台,每条分支由滑块、第一转动轴、第一连杆、第二转动轴、第二连杆、第三转动轴组成,移动副与固定平台成固定夹角,各分支转动副轴线与移动副轴线平行,固定架、三个连接分支和悬挂重物平台共同构成一种力输入输出映射关系不变的结构。本发明能够在保持配重块质量不变的情况下,在工作空间内悬挂物体平台沿任意轨迹运动即全域内可以实现自平衡重力。

基于磁悬浮随动的悬吊重力补偿装置.pdf
一种基于磁悬浮随动的悬吊重力补偿装置,其主要包括磁悬浮驱动补偿系统和悬吊补偿系统,磁悬浮驱动补偿系统包括磁悬浮驱动模块、磁悬浮导轨,磁悬浮导轨上分别设两个磁悬浮驱动模块;所述悬吊补偿系统包括悬吊架、悬吊恒力控制模块和位置伺服模块,悬吊架的四条支腿分别与上述磁悬浮驱动模块固连,两个位置伺服模块设在悬吊架上的滑轨上,并分别与两个悬吊恒力控制模块垂直连接;所述位置伺服模块包括两个X向移动滑块、Y向移动滑块、伺服电机、丝杠和两个辅助导杆;所述悬吊恒力控制模块包括直流电机、卷扬筒、钢丝绳、角度传感器、拉力传感器。本
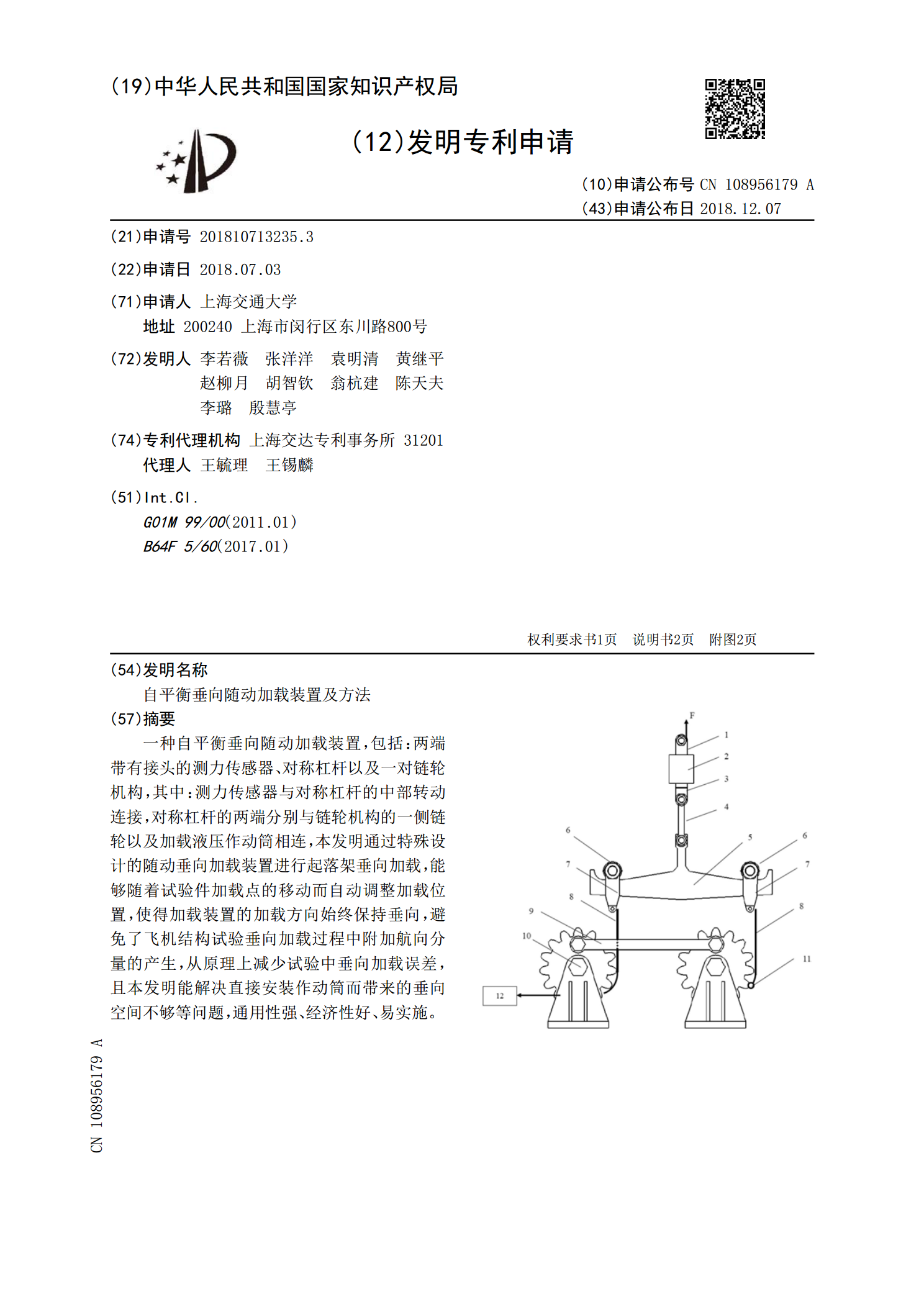
自平衡垂向随动加载装置及方法.pdf
一种自平衡垂向随动加载装置,包括:两端带有接头的测力传感器、对称杠杆以及一对链轮机构,其中:测力传感器与对称杠杆的中部转动连接,对称杠杆的两端分别与链轮机构的一侧链轮以及加载液压作动筒相连,本发明通过特殊设计的随动垂向加载装置进行起落架垂向加载,能够随着试验件加载点的移动而自动调整加载位置,使得加载装置的加载方向始终保持垂向,避免了飞机结构试验垂向加载过程中附加航向分量的产生,从原理上减少试验中垂向加载误差,且本发明能解决直接安装作动筒而带来的垂向空间不够等问题,通用性强、经济性好、易实施。