
浅海移动式平台的自动调平系统及调平方法.pdf

猫巷****傲柏

1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
浅海移动式平台的自动调平系统及调平方法.pdf
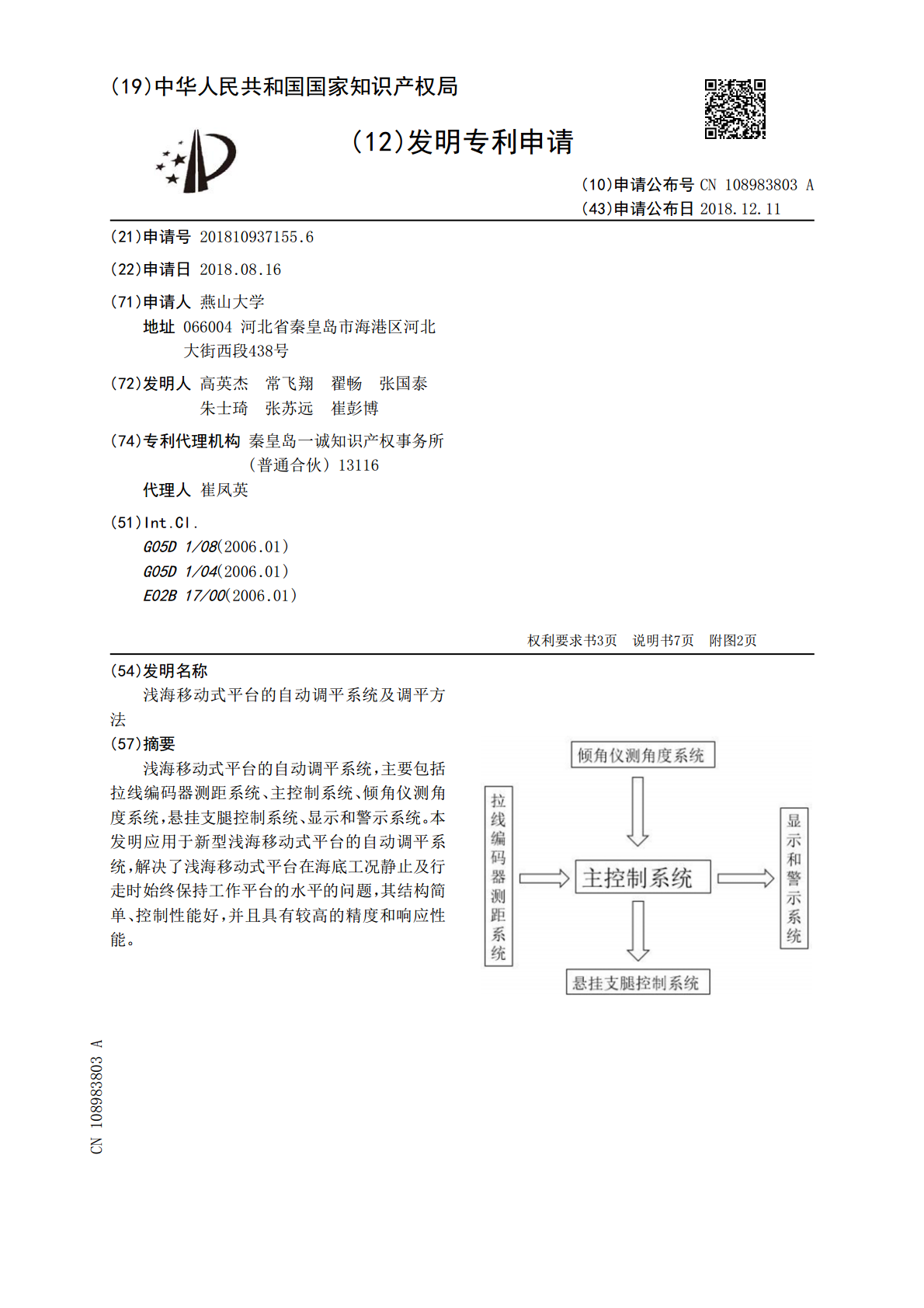
浅海移动式平台的自动调平系统,主要包括拉线编码器测距系统、主控制系统、倾角仪测角度系统,悬挂支腿控制系统、显示和警示系统。本发明应用于新型浅海移动式平台的自动调平系统,解决了浅海移动式平台在海底工况静止及行走时始终保持工作平台的水平的问题,其结构简单、控制性能好,并且具有较高的精度和响应性能。
平台调平系统和方法.pdf
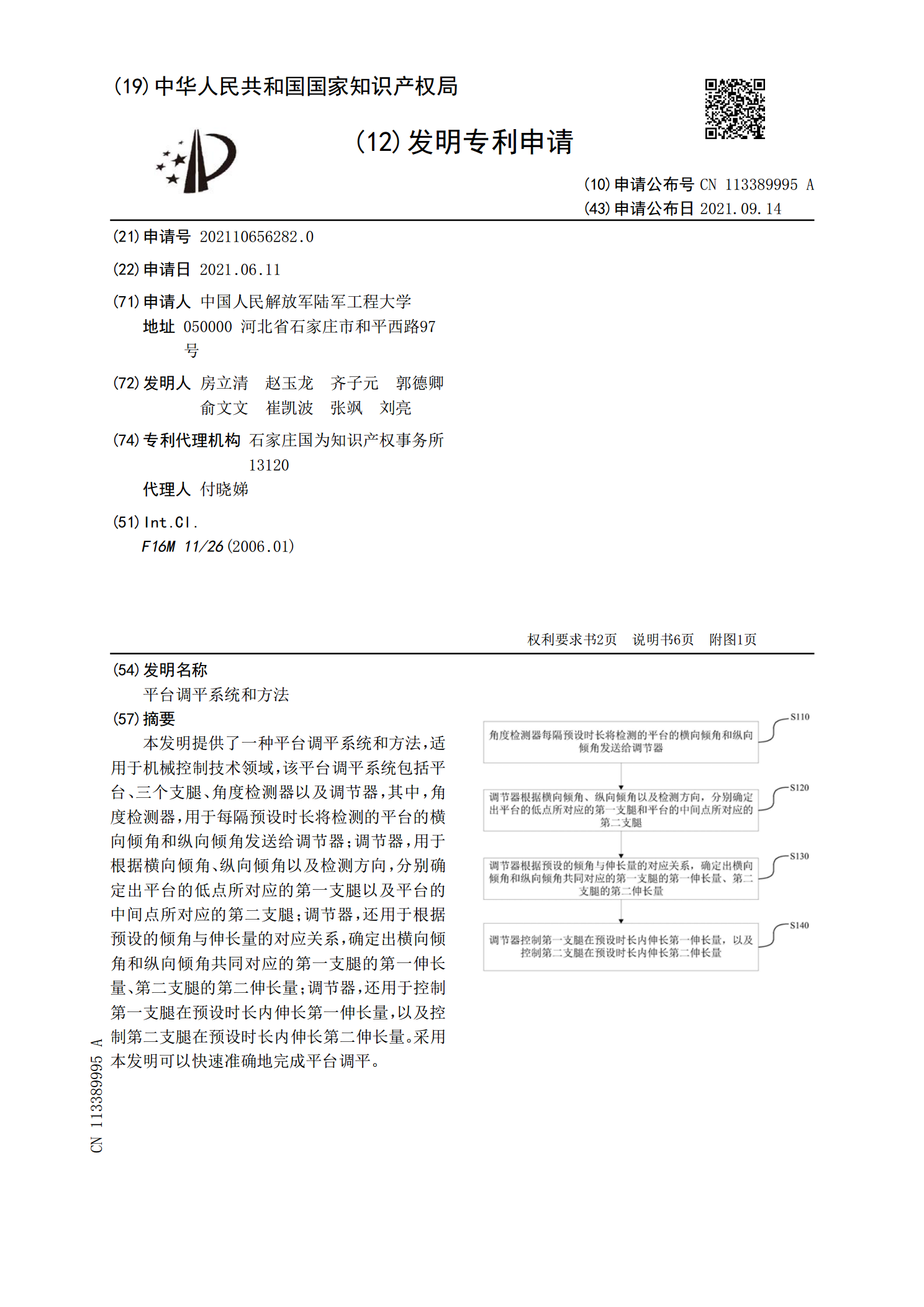
本发明提供了一种平台调平系统和方法,适用于机械控制技术领域,该平台调平系统包括平台、三个支腿、角度检测器以及调节器,其中,角度检测器,用于每隔预设时长将检测的平台的横向倾角和纵向倾角发送给调节器;调节器,用于根据横向倾角、纵向倾角以及检测方向,分别确定出平台的低点所对应的第一支腿以及平台的中间点所对应的第二支腿;调节器,还用于根据预设的倾角与伸长量的对应关系,确定出横向倾角和纵向倾角共同对应的第一支腿的第一伸长量、第二支腿的第二伸长量;调节器,还用于控制第一支腿在预设时长内伸长第一伸长量,以及控制第二支腿
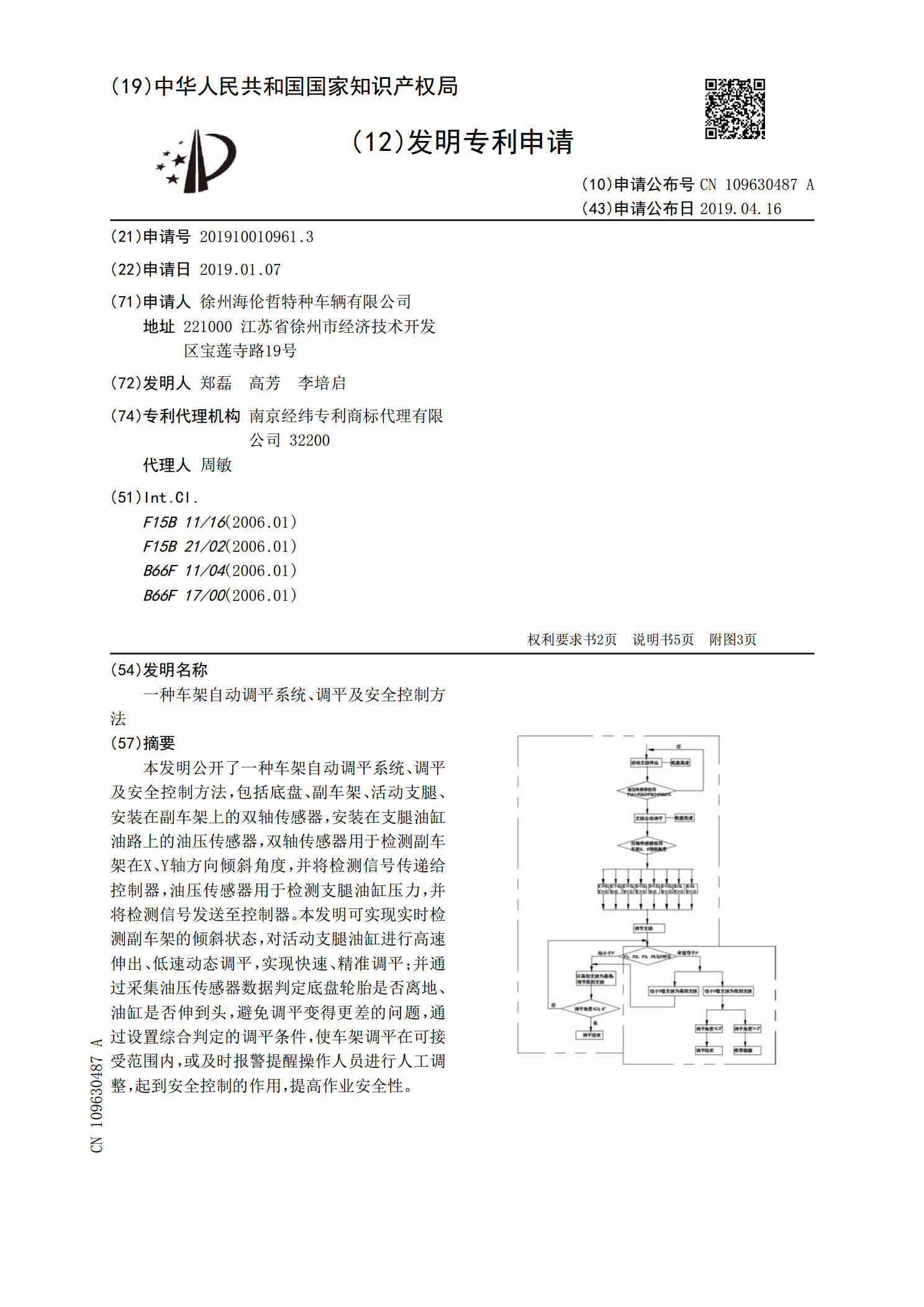
一种车架自动调平系统、调平及安全控制方法.pdf
本发明公开了一种车架自动调平系统、调平及安全控制方法,包括底盘、副车架、活动支腿、安装在副车架上的双轴传感器,安装在支腿油缸油路上的油压传感器,双轴传感器用于检测副车架在X、Y轴方向倾斜角度,并将检测信号传递给控制器,油压传感器用于检测支腿油缸压力,并将检测信号发送至控制器。本发明可实现实时检测副车架的倾斜状态,对活动支腿油缸进行高速伸出、低速动态调平,实现快速、精准调平;并通过采集油压传感器数据判定底盘轮胎是否离地、油缸是否伸到头,避免调平变得更差的问题,通过设置综合判定的调平条件,使车架调平在可接受范
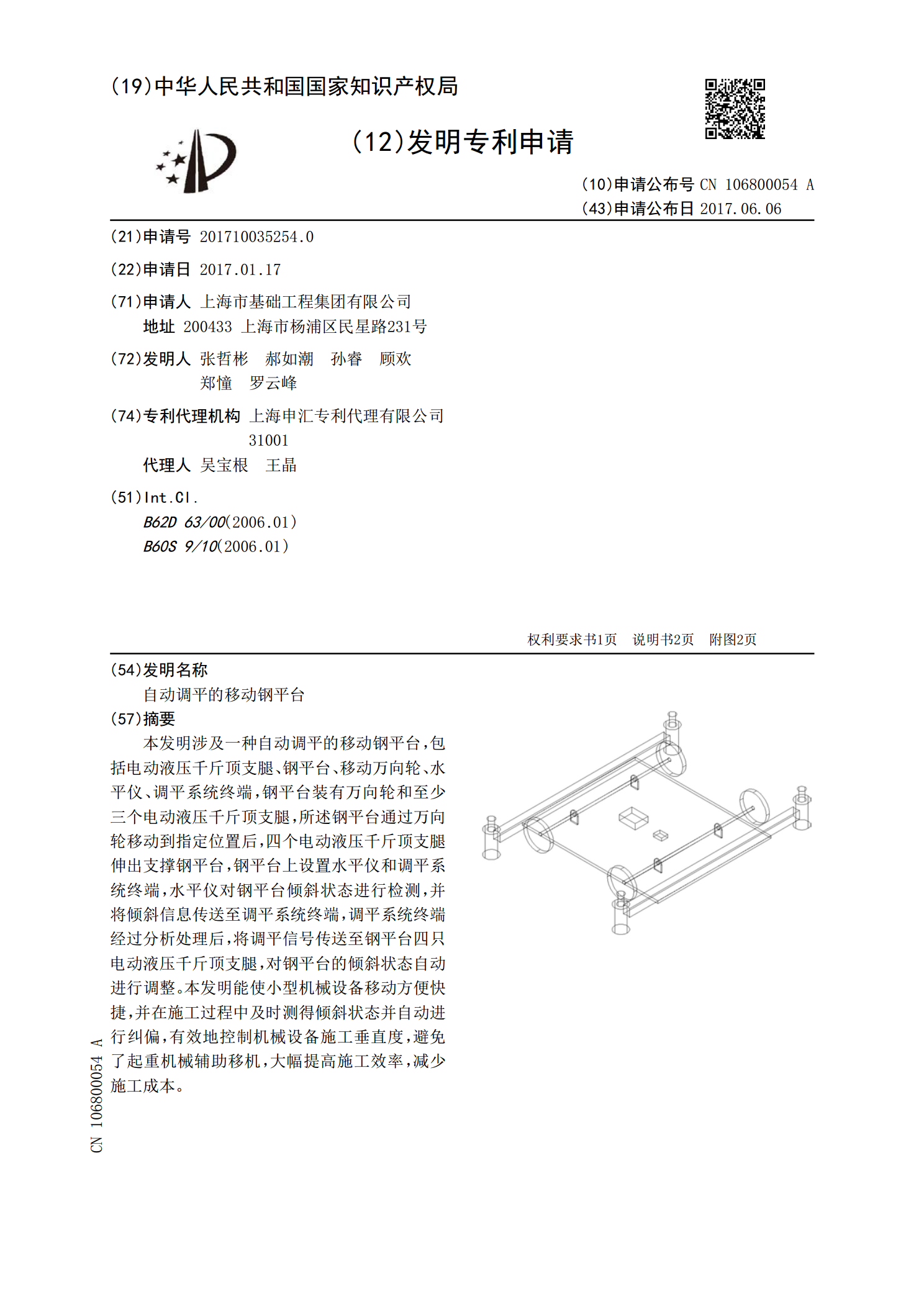
自动调平的移动钢平台.pdf
本发明涉及一种自动调平的移动钢平台,包括电动液压千斤顶支腿、钢平台、移动万向轮、水平仪、调平系统终端,钢平台装有万向轮和至少三个电动液压千斤顶支腿,所述钢平台通过万向轮移动到指定位置后,四个电动液压千斤顶支腿伸出支撑钢平台,钢平台上设置水平仪和调平系统终端,水平仪对钢平台倾斜状态进行检测,并将倾斜信息传送至调平系统终端,调平系统终端经过分析处理后,将调平信号传送至钢平台四只电动液压千斤顶支腿,对钢平台的倾斜状态自动进行调整。本发明能使小型机械设备移动方便快捷,并在施工过程中及时测得倾斜状态并自动进行纠偏,

一种机电式自动调平系统及调平方法.pdf
本发明涉及自动化控制技术领域,尤其涉及一种机电式自动调平系统及调平方法,调平系统包括控制模块,控制模块连接有不少于3个的用于支撑车载平台的伺服电动支腿、双轴倾角传感器、显示屏、蜂鸣器和控制终端,以及分别为控制模块、伺服电动支腿、双轴倾角传感器、显示屏、蜂鸣器和控制终端供电的电源模块;控制模块还连接有平面度激光测量模块。本发明提供的一种机电式自动调平系统及调平方法具有调平速度快,调平精度高,能实现自动、半自动、手动调平的自由切换且操作简单,自动化程度较高,体积较小,可靠性高的优点。