
一种机电式自动调平系统及调平方法.pdf

努力****爱敏

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机电式自动调平系统及调平方法.pdf
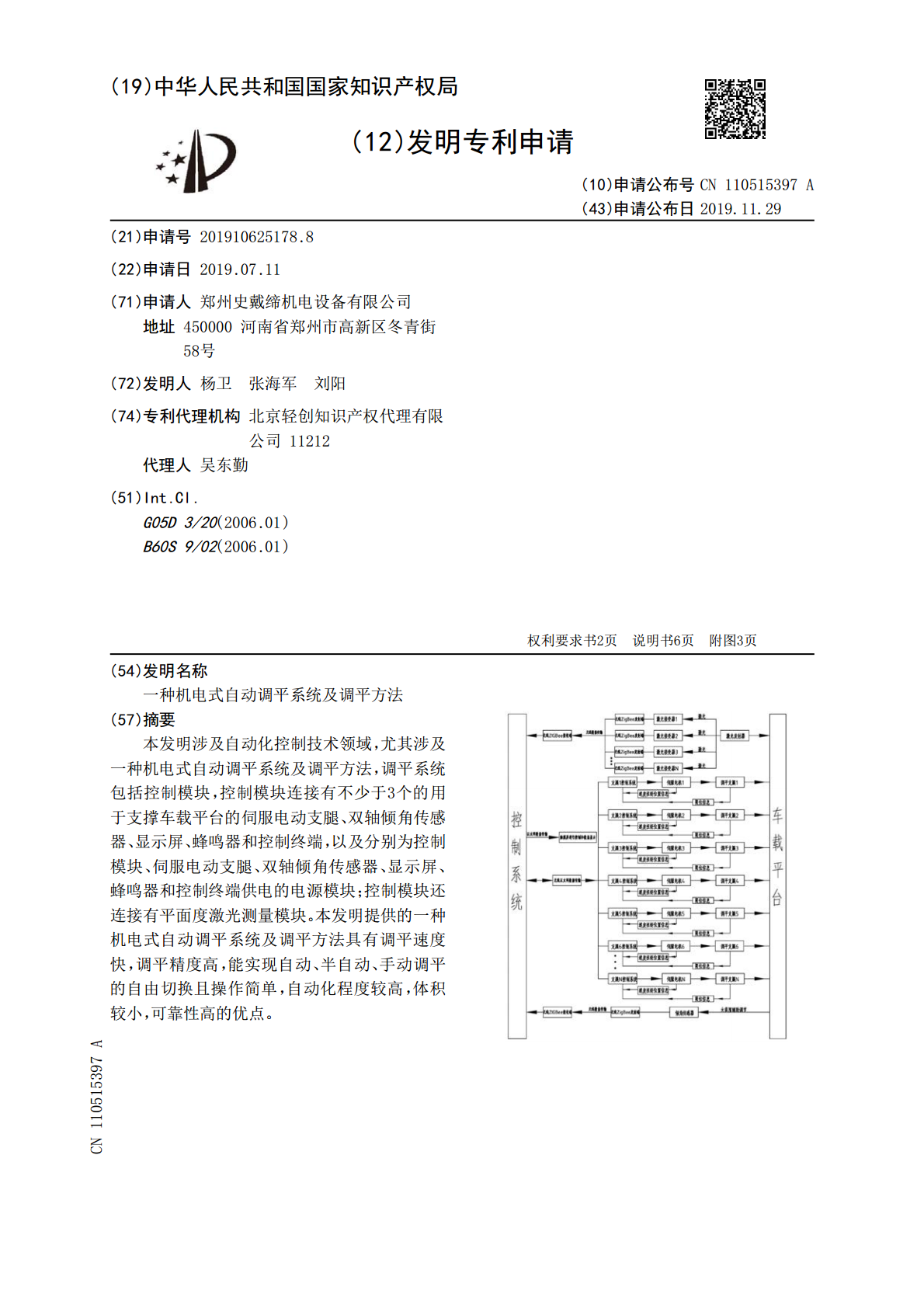
本发明涉及自动化控制技术领域,尤其涉及一种机电式自动调平系统及调平方法,调平系统包括控制模块,控制模块连接有不少于3个的用于支撑车载平台的伺服电动支腿、双轴倾角传感器、显示屏、蜂鸣器和控制终端,以及分别为控制模块、伺服电动支腿、双轴倾角传感器、显示屏、蜂鸣器和控制终端供电的电源模块;控制模块还连接有平面度激光测量模块。本发明提供的一种机电式自动调平系统及调平方法具有调平速度快,调平精度高,能实现自动、半自动、手动调平的自由切换且操作简单,自动化程度较高,体积较小,可靠性高的优点。

基于PLC的机电式自动调平系统.docx
基于PLC的机电式自动调平系统随着现代制造技术的普及和机械化程度的不断提高,越来越多的厂家开始使用机电式自动调平系统来提高生产效率和节省人力成本。在这种系统中,PLC就是最重要的核心部分,它可以对机械控制系统进行智能化的控制和监控,实现高效、精准的生产控制。本文将详细讨论基于PLC的机电式自动调平系统的原理、功能以及优点,以及如何使用PLC来实现自动调平的过程。一、机电式自动调平系统的原理和功能机电式自动调平系统是利用PLC进行智能控制的一种设备,它主要由机电结构、传感器设备、控制系统和人机界面等组成。它
一种车架自动调平系统、调平及安全控制方法.pdf
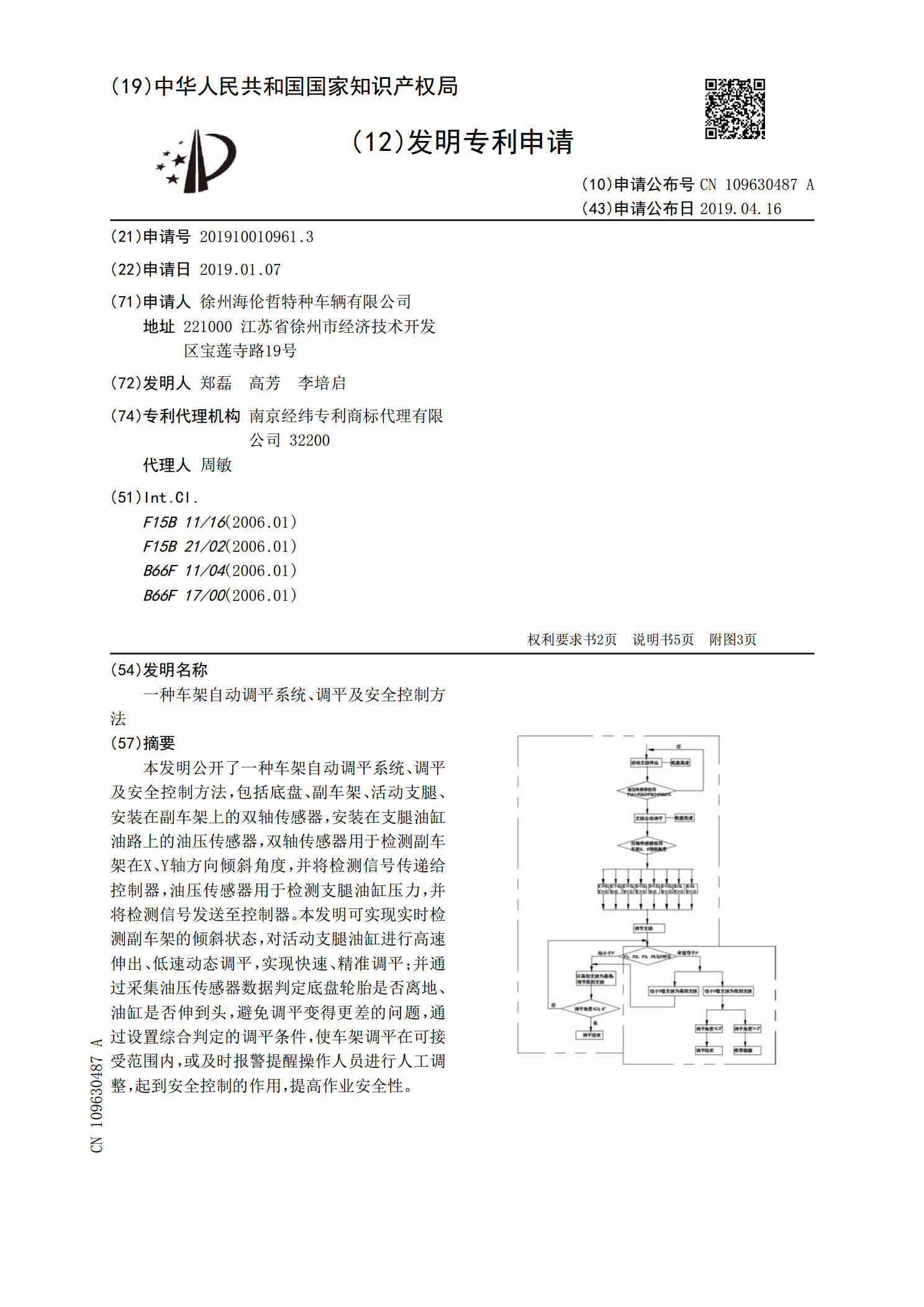
本发明公开了一种车架自动调平系统、调平及安全控制方法,包括底盘、副车架、活动支腿、安装在副车架上的双轴传感器,安装在支腿油缸油路上的油压传感器,双轴传感器用于检测副车架在X、Y轴方向倾斜角度,并将检测信号传递给控制器,油压传感器用于检测支腿油缸压力,并将检测信号发送至控制器。本发明可实现实时检测副车架的倾斜状态,对活动支腿油缸进行高速伸出、低速动态调平,实现快速、精准调平;并通过采集油压传感器数据判定底盘轮胎是否离地、油缸是否伸到头,避免调平变得更差的问题,通过设置综合判定的调平条件,使车架调平在可接受范
基于四点支撑的调平方法及机电式自动调平系统.pdf
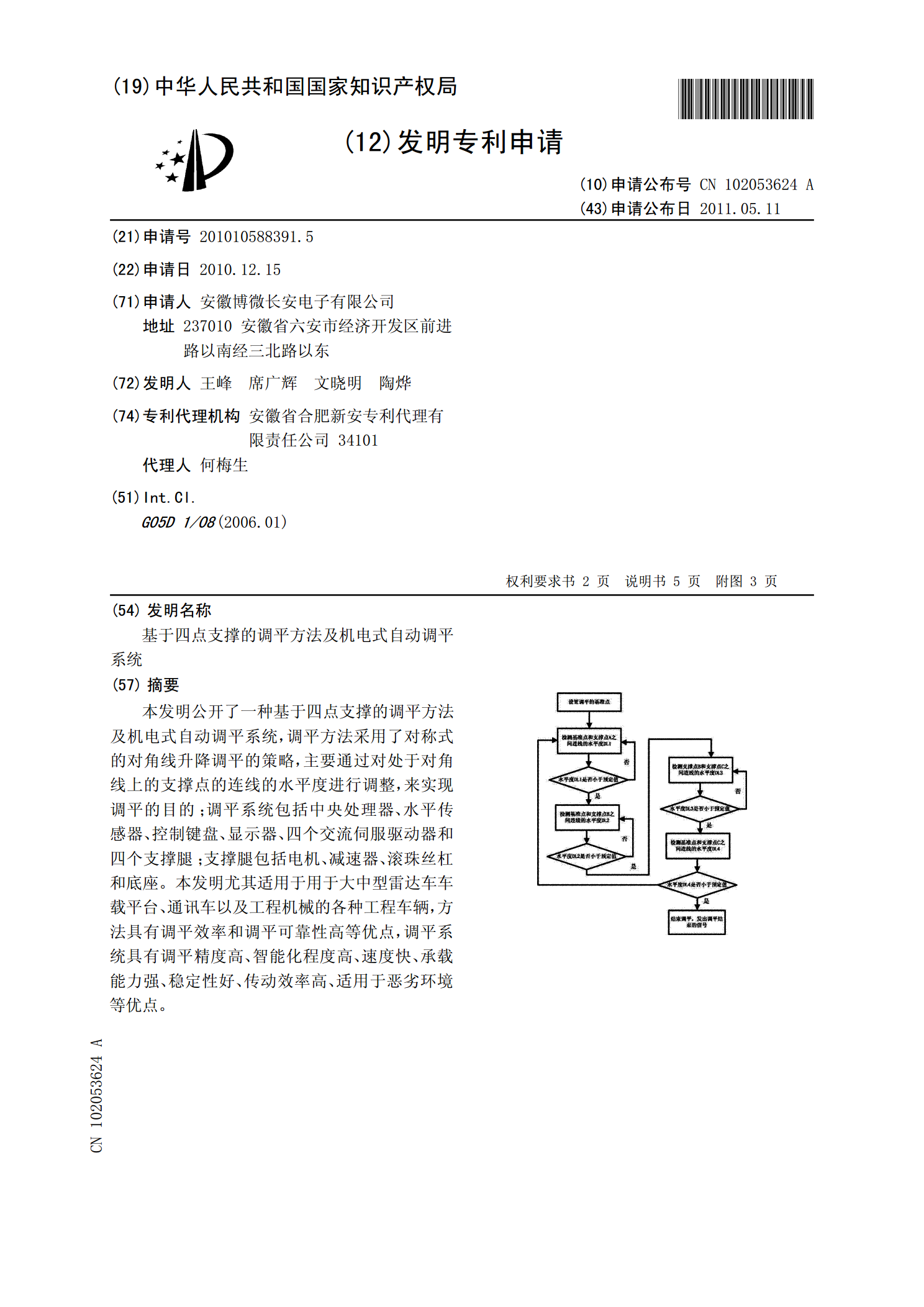
本发明公开了一种基于四点支撑的调平方法及机电式自动调平系统,调平方法采用了对称式的对角线升降调平的策略,主要通过对处于对角线上的支撑点的连线的水平度进行调整,来实现调平的目的;调平系统包括中央处理器、水平传感器、控制键盘、显示器、四个交流伺服驱动器和四个支撑腿;支撑腿包括电机、减速器、滚珠丝杠和底座。本发明尤其适用于用于大中型雷达车车载平台、通讯车以及工程机械的各种工程车辆,方法具有调平效率和调平可靠性高等优点,调平系统具有调平精度高、智能化程度高、速度快、承载能力强、稳定性好、传动效率高、适用于恶劣环境
浅海移动式平台的自动调平系统及调平方法.pdf
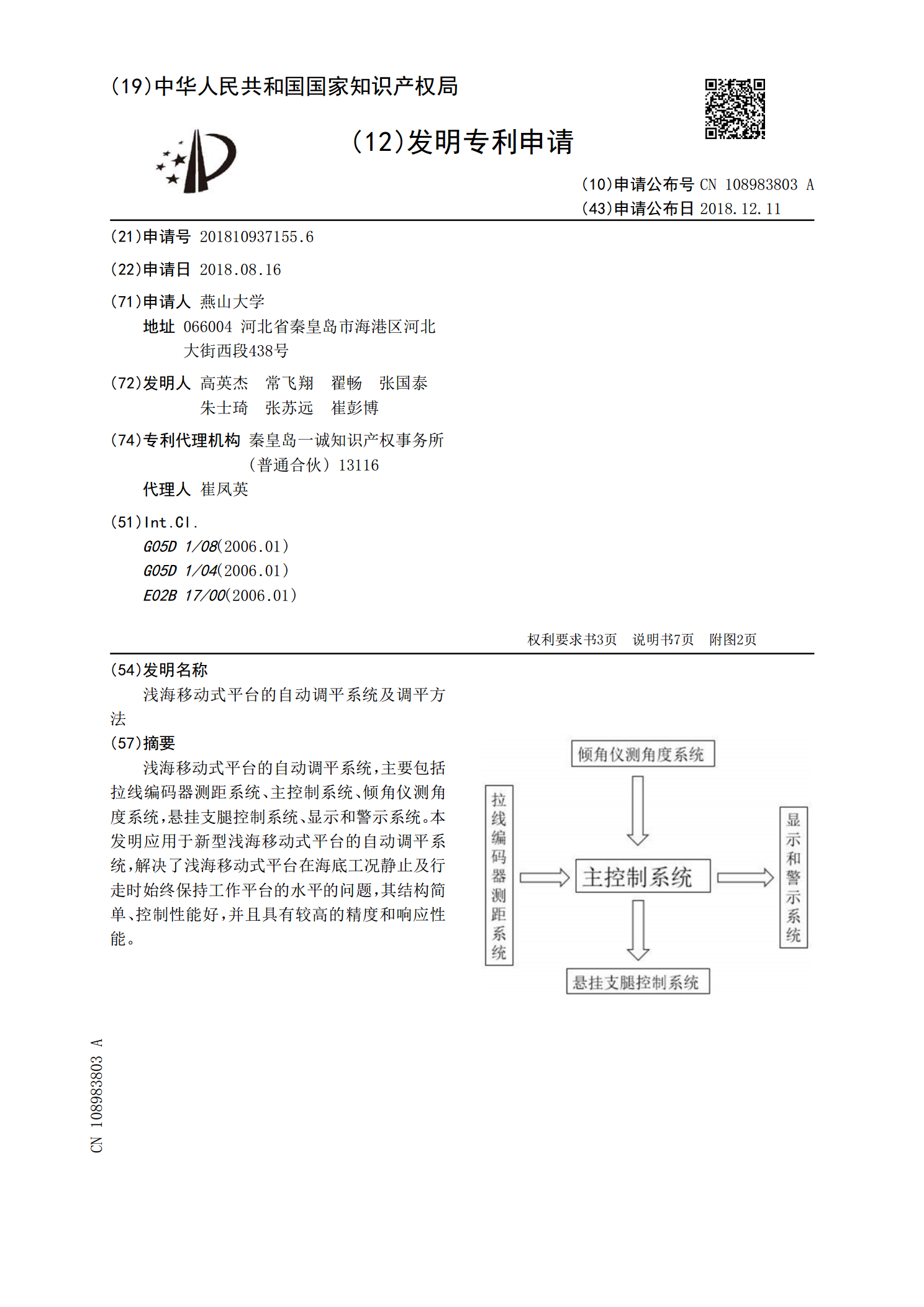
浅海移动式平台的自动调平系统,主要包括拉线编码器测距系统、主控制系统、倾角仪测角度系统,悬挂支腿控制系统、显示和警示系统。本发明应用于新型浅海移动式平台的自动调平系统,解决了浅海移动式平台在海底工况静止及行走时始终保持工作平台的水平的问题,其结构简单、控制性能好,并且具有较高的精度和响应性能。