
升降平台支腿结构及其控制方法.pdf

冬易****娘子

1/10

2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
升降平台支腿结构及其控制方法.pdf
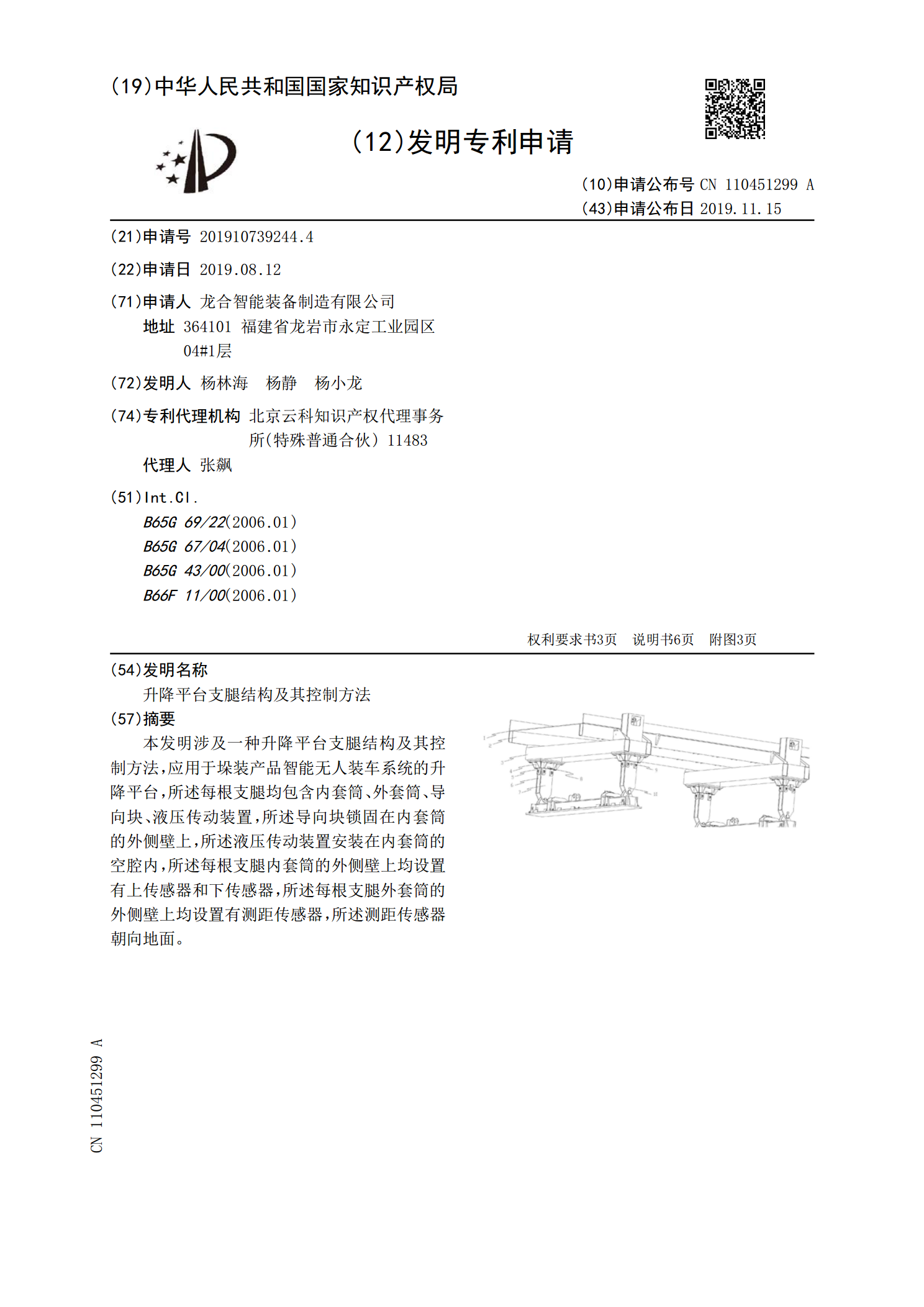
本发明涉及一种升降平台支腿结构及其控制方法,应用于垛装产品智能无人装车系统的升降平台,所述每根支腿均包含内套筒、外套筒、导向块、液压传动装置,所述导向块锁固在内套筒的外侧壁上,所述液压传动装置安装在内套筒的空腔内,所述每根支腿内套筒的外侧壁上均设置有上传感器和下传感器,所述每根支腿外套筒的外侧壁上均设置有测距传感器,所述测距传感器朝向地面。

升降工作平台折叠支腿.pdf
本发明公开了一种升降工作平台折叠支腿,属于稳定支撑装置,现有支腿存在体积过大,不易存放,操作复杂,本发明将支腿主体的近端通过第二横向销轴连接在固定座上的上轴套上,斜拉杆的近端通过第三横向销轴连接在下轴套上,斜拉杆的远端与支腿主体中部通过插销连接,第二横向销轴、第三横向销轴和插销确定一个三角形令斜拉杆将支腿主体保持在第一支撑位置;而且,第一支撑螺杆通过螺纹与螺母装配可在第二收纳位置与第二支撑位置之间换位。拆下插销时,支腿主体可向第一收纳位置翻转换位,斜拉杆能够绕第三横向销轴翻转并与支腿主体并拢;而且,第一支
铣刨机及其支腿控制方法.pdf
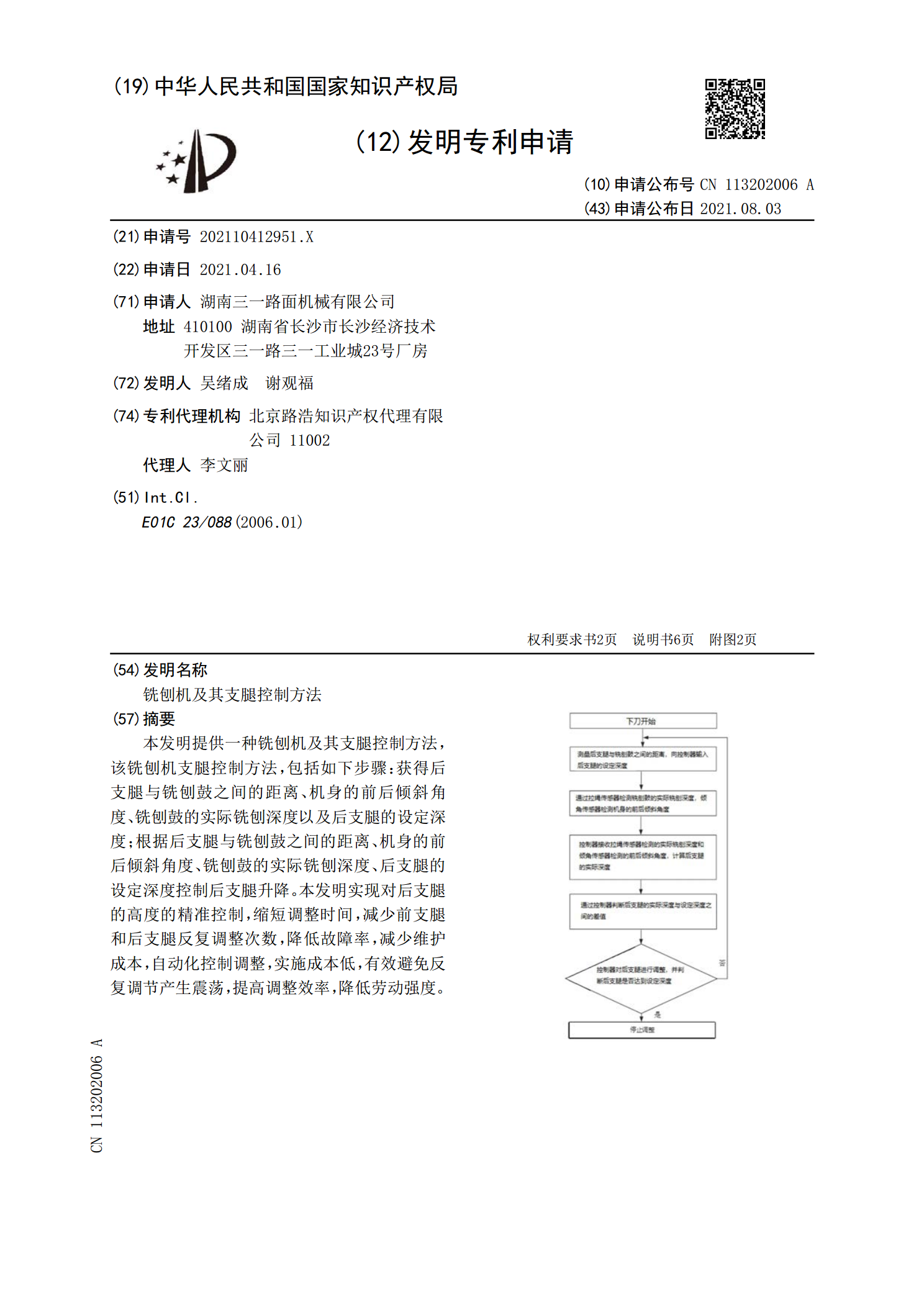
本发明提供一种铣刨机及其支腿控制方法,该铣刨机支腿控制方法,包括如下步骤:获得后支腿与铣刨鼓之间的距离、机身的前后倾斜角度、铣刨鼓的实际铣刨深度以及后支腿的设定深度;根据后支腿与铣刨鼓之间的距离、机身的前后倾斜角度、铣刨鼓的实际铣刨深度、后支腿的设定深度控制后支腿升降。本发明实现对后支腿的高度的精准控制,缩短调整时间,减少前支腿和后支腿反复调整次数,降低故障率,减少维护成本,自动化控制调整,实施成本低,有效避免反复调节产生震荡,提高调整效率,降低劳动强度。
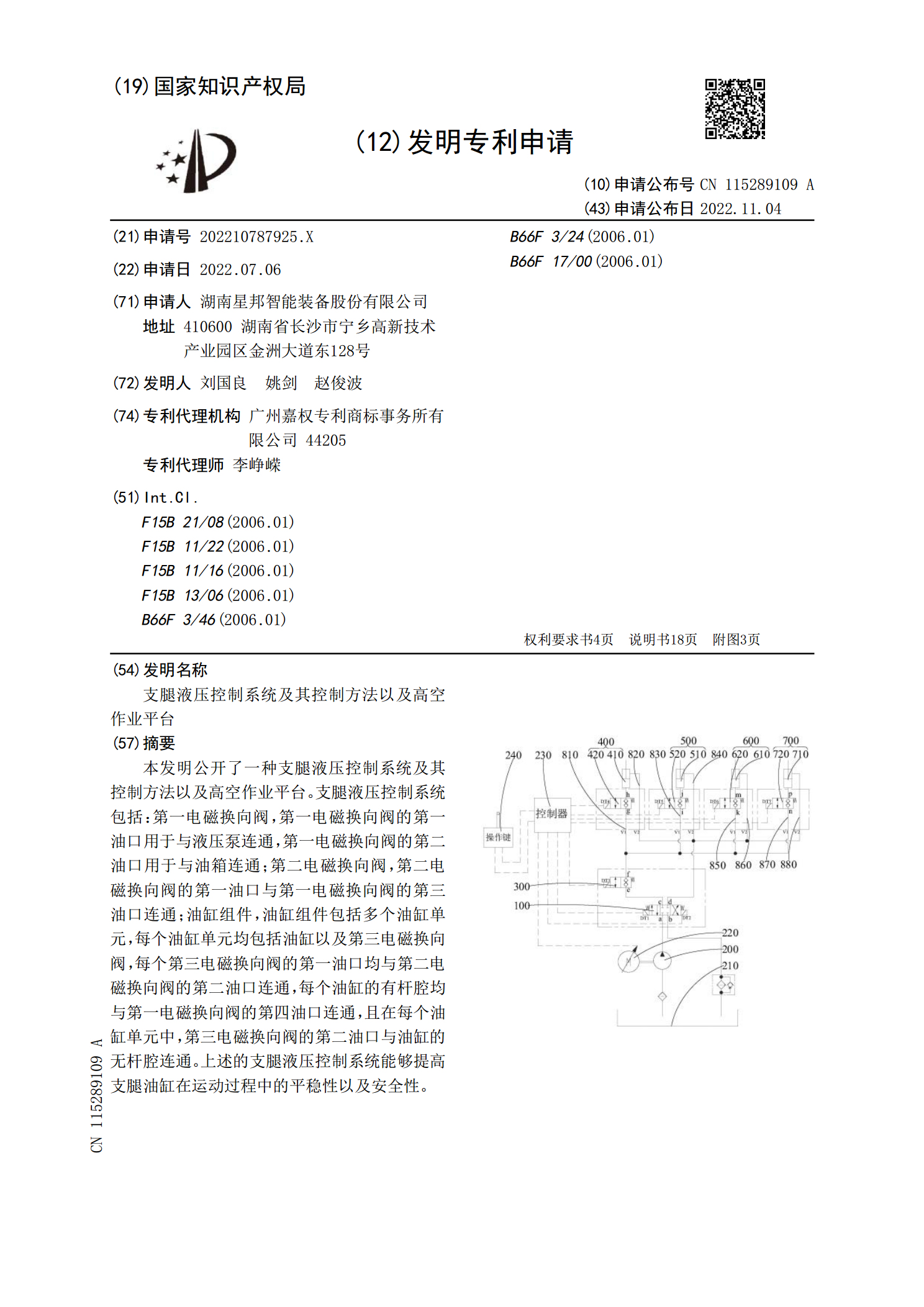
支腿液压控制系统及其控制方法以及高空作业平台.pdf
本发明公开了一种支腿液压控制系统及其控制方法以及高空作业平台。支腿液压控制系统包括:第一电磁换向阀,第一电磁换向阀的第一油口用于与液压泵连通,第一电磁换向阀的第二油口用于与油箱连通;第二电磁换向阀,第二电磁换向阀的第一油口与第一电磁换向阀的第三油口连通;油缸组件,油缸组件包括多个油缸单元,每个油缸单元均包括油缸以及第三电磁换向阀,每个第三电磁换向阀的第一油口均与第二电磁换向阀的第二油口连通,每个油缸的有杆腔均与第一电磁换向阀的第四油口连通,且在每个油缸单元中,第三电磁换向阀的第二油口与油缸的无杆腔连通。上
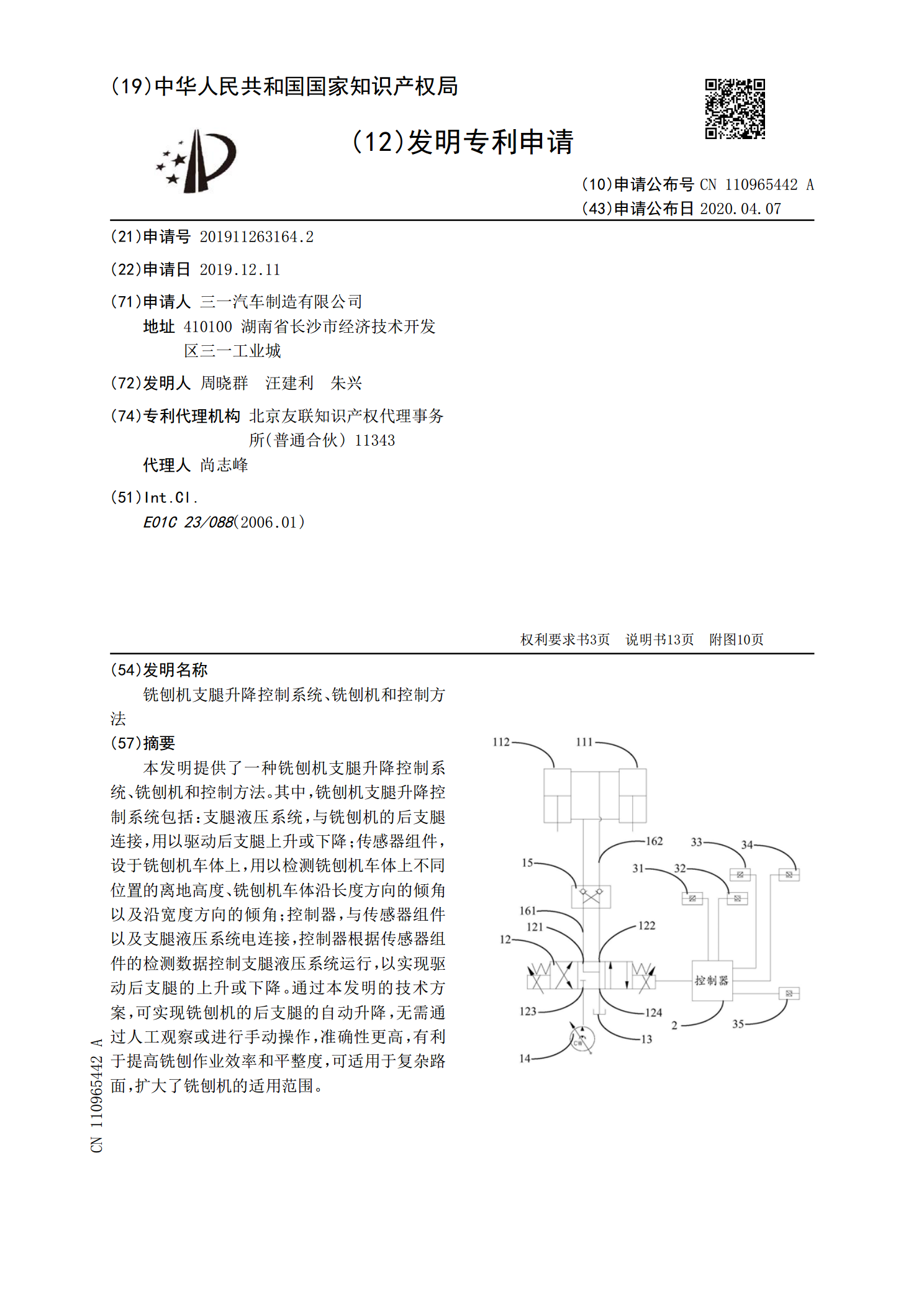
铣刨机支腿升降控制系统、铣刨机和控制方法.pdf
本发明提供了一种铣刨机支腿升降控制系统、铣刨机和控制方法。其中,铣刨机支腿升降控制系统包括:支腿液压系统,与铣刨机的后支腿连接,用以驱动后支腿上升或下降;传感器组件,设于铣刨机车体上,用以检测铣刨机车体上不同位置的离地高度、铣刨机车体沿长度方向的倾角以及沿宽度方向的倾角;控制器,与传感器组件以及支腿液压系统电连接,控制器根据传感器组件的检测数据控制支腿液压系统运行,以实现驱动后支腿的上升或下降。通过本发明的技术方案,可实现铣刨机的后支腿的自动升降,无需通过人工观察或进行手动操作,准确性更高,有利于提高铣刨