
铣刨机及其支腿控制方法.pdf

mm****酱吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
铣刨机及其支腿控制方法.pdf
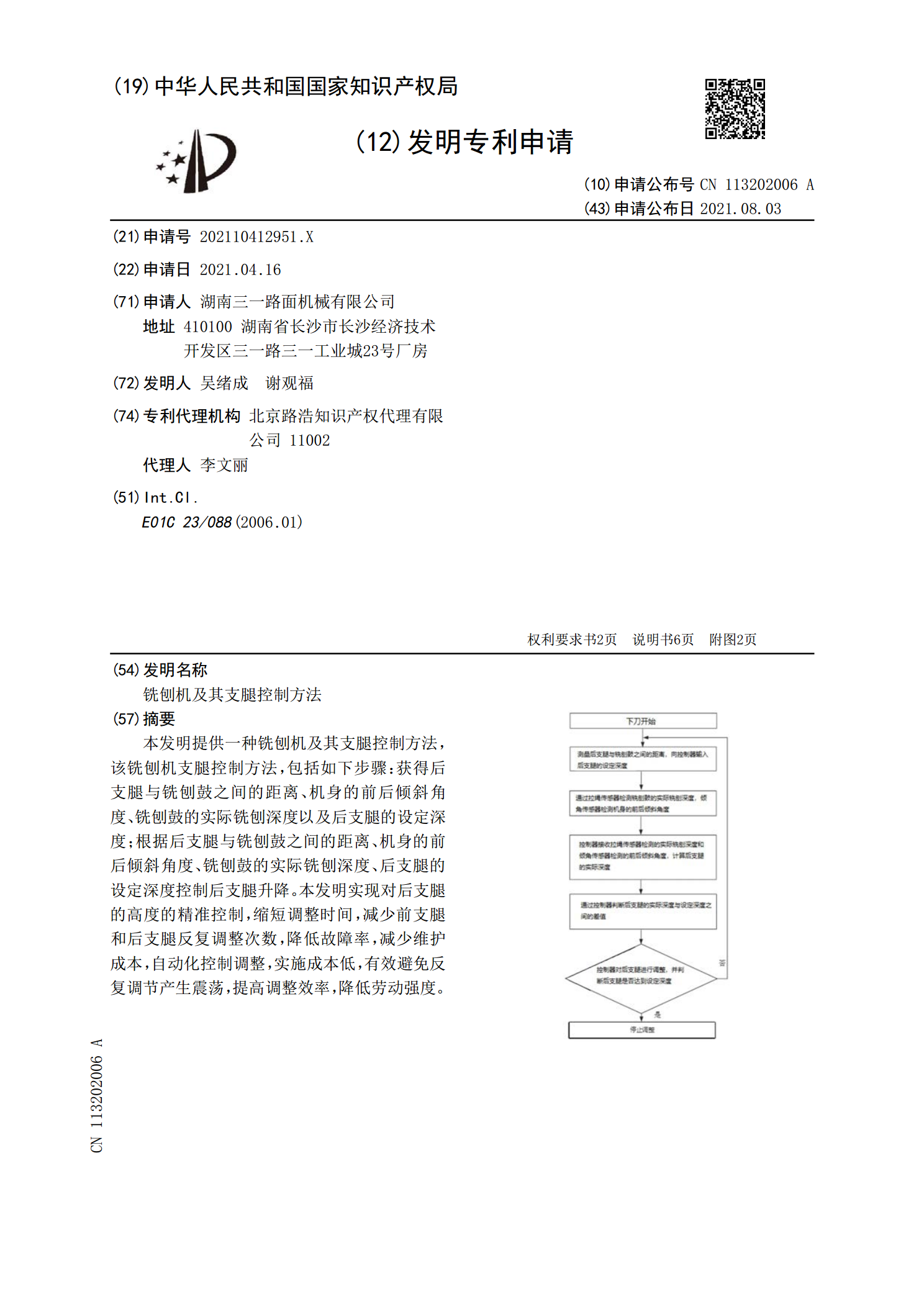
本发明提供一种铣刨机及其支腿控制方法,该铣刨机支腿控制方法,包括如下步骤:获得后支腿与铣刨鼓之间的距离、机身的前后倾斜角度、铣刨鼓的实际铣刨深度以及后支腿的设定深度;根据后支腿与铣刨鼓之间的距离、机身的前后倾斜角度、铣刨鼓的实际铣刨深度、后支腿的设定深度控制后支腿升降。本发明实现对后支腿的高度的精准控制,缩短调整时间,减少前支腿和后支腿反复调整次数,降低故障率,减少维护成本,自动化控制调整,实施成本低,有效避免反复调节产生震荡,提高调整效率,降低劳动强度。
铣刨机支腿升降控制系统、铣刨机和控制方法.pdf
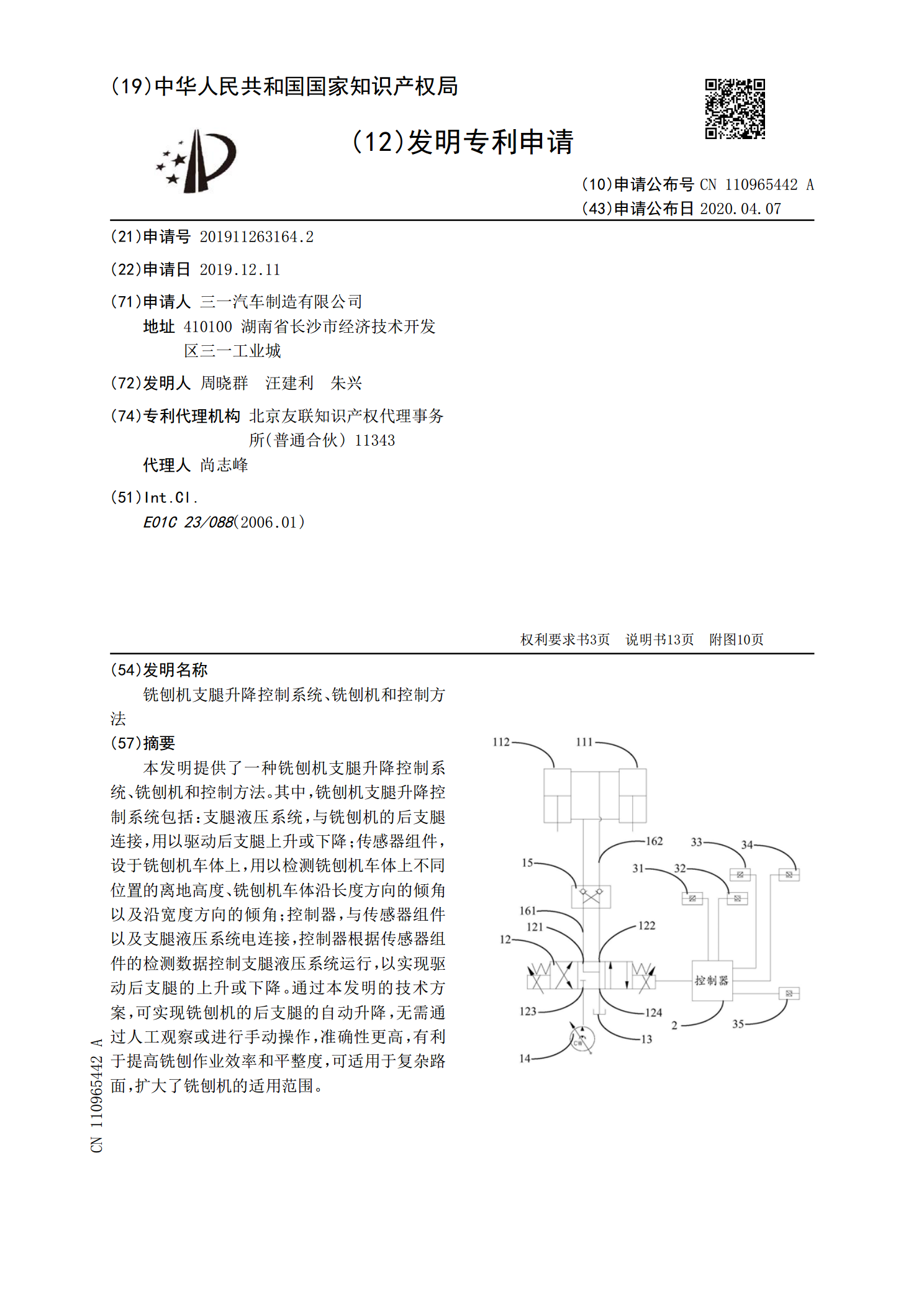
本发明提供了一种铣刨机支腿升降控制系统、铣刨机和控制方法。其中,铣刨机支腿升降控制系统包括:支腿液压系统,与铣刨机的后支腿连接,用以驱动后支腿上升或下降;传感器组件,设于铣刨机车体上,用以检测铣刨机车体上不同位置的离地高度、铣刨机车体沿长度方向的倾角以及沿宽度方向的倾角;控制器,与传感器组件以及支腿液压系统电连接,控制器根据传感器组件的检测数据控制支腿液压系统运行,以实现驱动后支腿的上升或下降。通过本发明的技术方案,可实现铣刨机的后支腿的自动升降,无需通过人工观察或进行手动操作,准确性更高,有利于提高铣刨

用于铣刨机支腿的电液控制装置.pdf
本发明提出了一种用于铣刨机支腿的电液控制装置,包括:油源,前支腿油缸,流量调整回路,其连接在油源与前支腿油缸之间;压力测量设备,其测量前支腿油缸的无杆腔压力;和信号处理与指示模块,其与压力测量设备和流量调整回路中的电控部件连接,根据压力测量设备反馈的压力与负载的匹配程度,发出调整后的信号给流量调整回路以调整进入前支腿油缸的油液。该装置能确保在施工过程中前支腿油缸不会悬空,铣刨鼓切削速度与前支腿油缸下降速度能更好地匹配,使整机性能更可靠、更节能,并能延长设备使用寿命。

一种路面铣刨机及其支腿摆动机构.pdf
本发明提出了一种路面铣刨机及其支腿摆动机构,该支腿摆动机构包括由机架、摆杆、可转动套杆和固定连接杆构成的双摇杆机构,该摆杆和该可转动套杆为摇杆,该固定连接杆为连杆,该固定连接杆以路面铣刨机的支腿为铰轴与可转动套杆构成可转动连接,且该固定连接杆与支腿固定连接,并在该双摇杆机构摆动前与摆动后相互平行。本发明所述的支腿摆动机构采用双摇杆机构,并将支腿作为可转动套杆和固定连接杆的铰轴,采用这种结构,一方面,因为固定连接杆与支腿固定连接且摆动前后保持平行,所以不会改变轮胎或者履带的前进方向,另一方面,在两个摇杆活动
一种铣刨机支腿运动控制系统.pdf
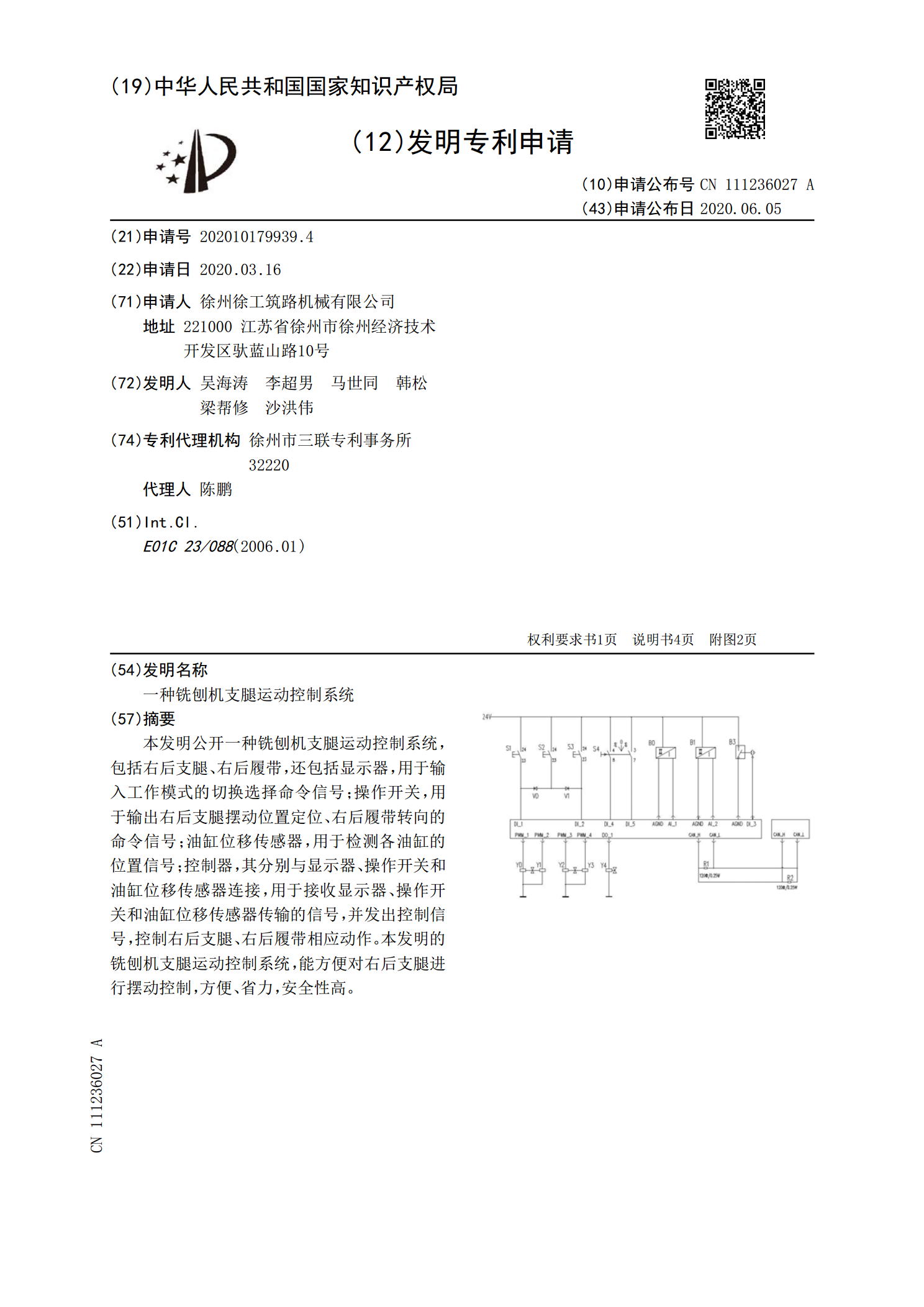
本发明公开一种铣刨机支腿运动控制系统,包括右后支腿、右后履带,还包括显示器,用于输入工作模式的切换选择命令信号;操作开关,用于输出右后支腿摆动位置定位、右后履带转向的命令信号;油缸位移传感器,用于检测各油缸的位置信号;控制器,其分别与显示器、操作开关和油缸位移传感器连接,用于接收显示器、操作开关和油缸位移传感器传输的信号,并发出控制信号,控制右后支腿、右后履带相应动作。本发明的铣刨机支腿运动控制系统,能方便对右后支腿进行摆动控制,方便、省力,安全性高。