
一种用于稳像望远镜的棱镜云台及其控制方法.pdf

一条****丹淑

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于稳像望远镜的棱镜云台及其控制方法.pdf
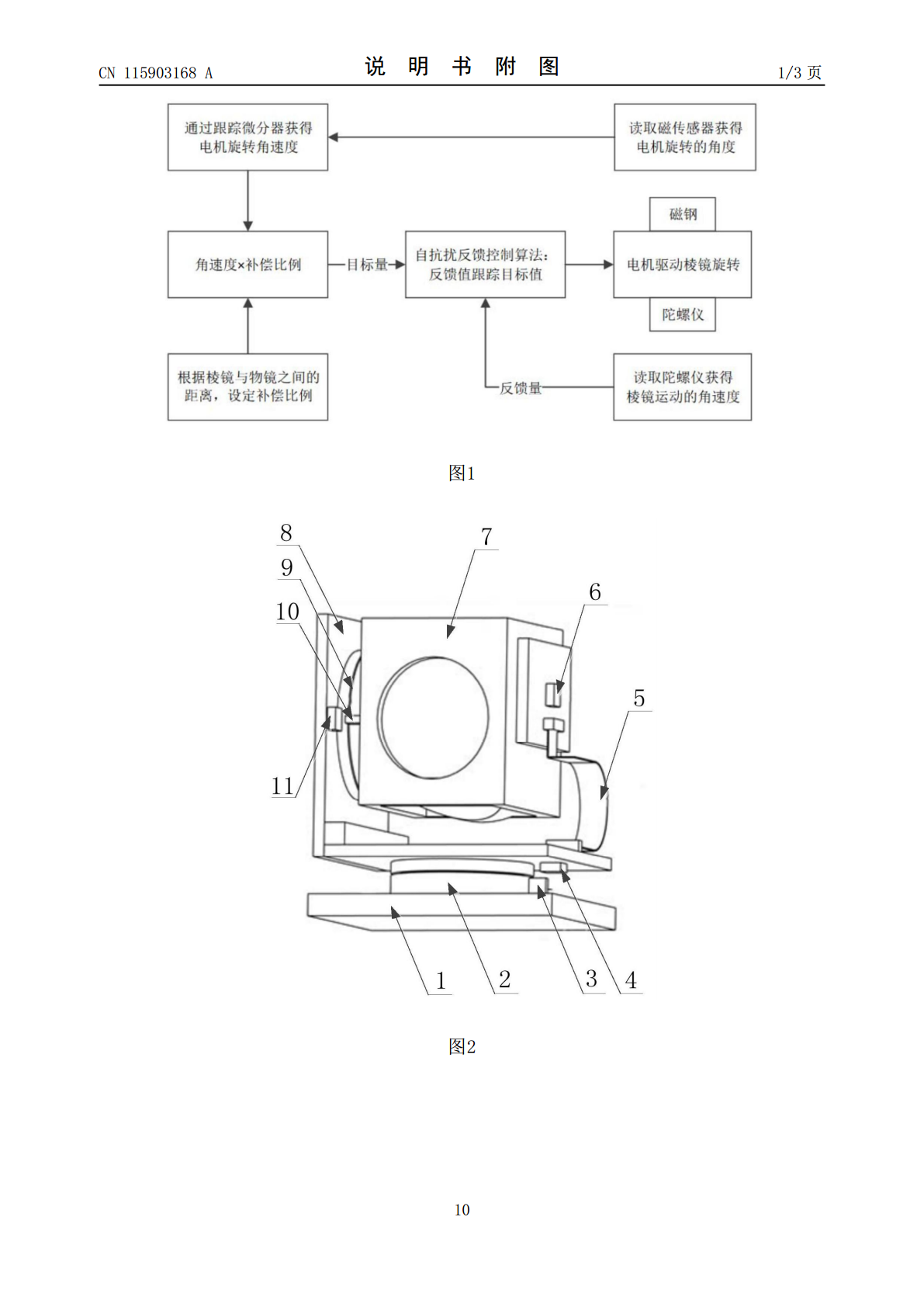
本发明公开了一种用于稳像望远镜的棱镜云台及其控制方法,该棱镜云台包括云台结构件,安装在所述云台结构件上的正像棱镜和云台控制电路板,设置在所述正像棱镜上的第一陀螺仪传感器,以及设置在所述云台结构件上的俯仰轴检测组件和方位轴检测组件。控制方法包括根据正像棱镜与物镜之间的距离设定补偿比例Scale;获取俯仰轴电机的旋转角速度MspeedX和方位轴电机的旋转角速度MSpeedZ等步骤。本发明通过磁传感器获得电机旋转角度并计算出角速度,结合设定的比例系数生成棱镜的运动角速度的目标量,并将陀螺仪传感器的角速度数据作为
一种用于PGK的旋转云台及其控制方法.pdf
本发明涉及一种用于PGK的旋转云台及其控制方法,它属于弹道控制装置及控制方法技术领域。主要解决现有PGK存在的当弹丸的转速不在此范围内时,旋转翼筒无法在惯性空间下保持静止产生稳定的法向力,便会丧失修正能力的技术问题。本发明的技术方案是:一种用于PGK的旋转云台,其包括直流电机、电源引信舱、齿轮轴、小轴承、齿轮轴紧固小螺钉、压盖连接螺钉、接头、压环、大轴承、电机工作架、两个行星轮、压盖和驱动小齿轮。本发明可与传统制式弹螺纹接口直接连接。本发明的电源引信舱外部有标准M52X3螺纹与弹体连接,接头与PGK连接。

一种云台及其控制方法.pdf
本发明公开了一种云台及其控制方法,其中,云台包括:控制器、电机、电机驱动模块、刹车驱动模块、刹车线圈和制动结构;控制器分别与电机驱动模块和刹车驱动模块连接;控制器,用于在云台保持静止超过预设时间时,控制刹车线圈和电机处于断电状态,使制动结构对电机进行制动;在对云台进行解锁时,控制电机和刹车线圈处于通电状态,使制动结构与电机分离,使云台解锁。由此,控制器对刹车线圈施加相应的电信号使云台解锁后,可以对云台做精确的控制。此外,本发明实施例提供的云台不采用蜗轮蜗杆结构或减速电机,从而不会影响云台的高速旋转,避免了

一种用于测距飞行器的云台及云台的控制方法.pdf
一种用于测距飞行器的云台及云台的控制方法,用于测距飞行器的云台包括:固定台,包括:与飞行器相连的连接板,以及用于固定测距仪的第一环形支撑架,连接板和第一环形支撑架通过弹性元件相连;第一环形支撑架为磁性元件;磁力发生机构,包括:第二环形支撑架,第二环形支撑架其周向方向上缠绕有至少三段相互独立的第二通电线圈;陀螺仪,用于检测第一环形支撑架的倾斜角度;控制器,控制器接收陀螺仪检测到的倾斜角度信息,产生与第一环形支撑架相反的磁作用力使第一环形支撑架处于水平状态。以解决现有技术中的多轴云台其驱动力较小和可靠性较差,
激光测距望远镜稳像控制装置及设备.pdf
本申请涉及一种激光测距望远镜稳像控制装置及设备,包括角位移传感器、控制器和调节装置,角位移传感器检测激光测距望远镜的运动,生成角位移信号并发送至控制器,控制器发送偏转信号至调节装置,调节装置控制激光测距望远镜的稳像透镜产生与角位移信号对应的偏移,当激光测距望远镜倾斜时,角位移传感器生成角位移信号至控制器,控制器控制调节装置对稳像透镜进行调节,使稳像透镜产生与角位移信号对应的偏移,抵消激光测距望远镜因偏转带来的视场抖动或者震动等,达到稳定观察视场的目的,且该装置不需要与支架平台配合使用,方便激光测距望远镜小