
一种基于五杆机构的轮腿混合驱动矿用机器人.pdf

猫巷****忠娟

1/8

2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于五杆机构的轮腿混合驱动矿用机器人.pdf
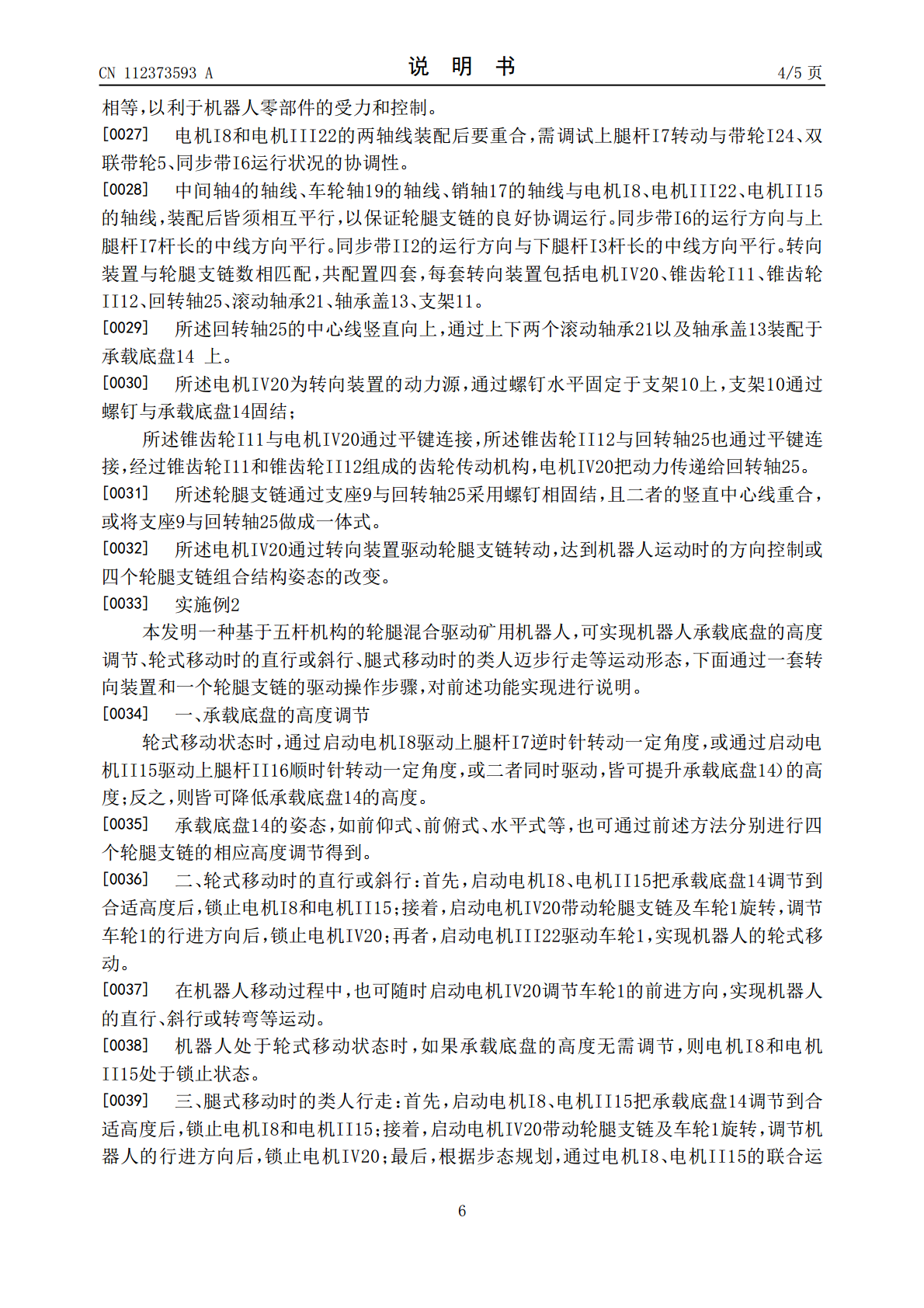
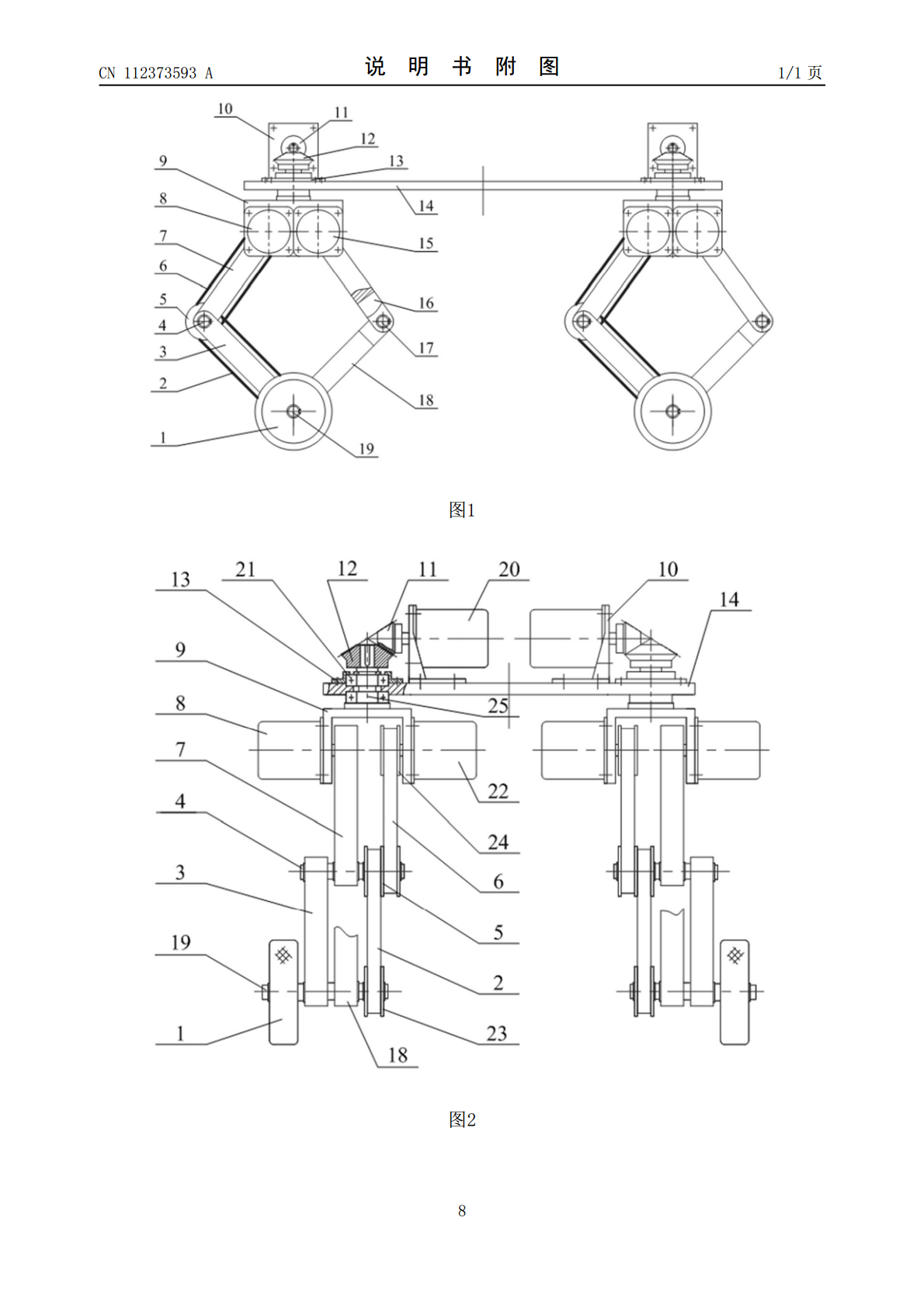
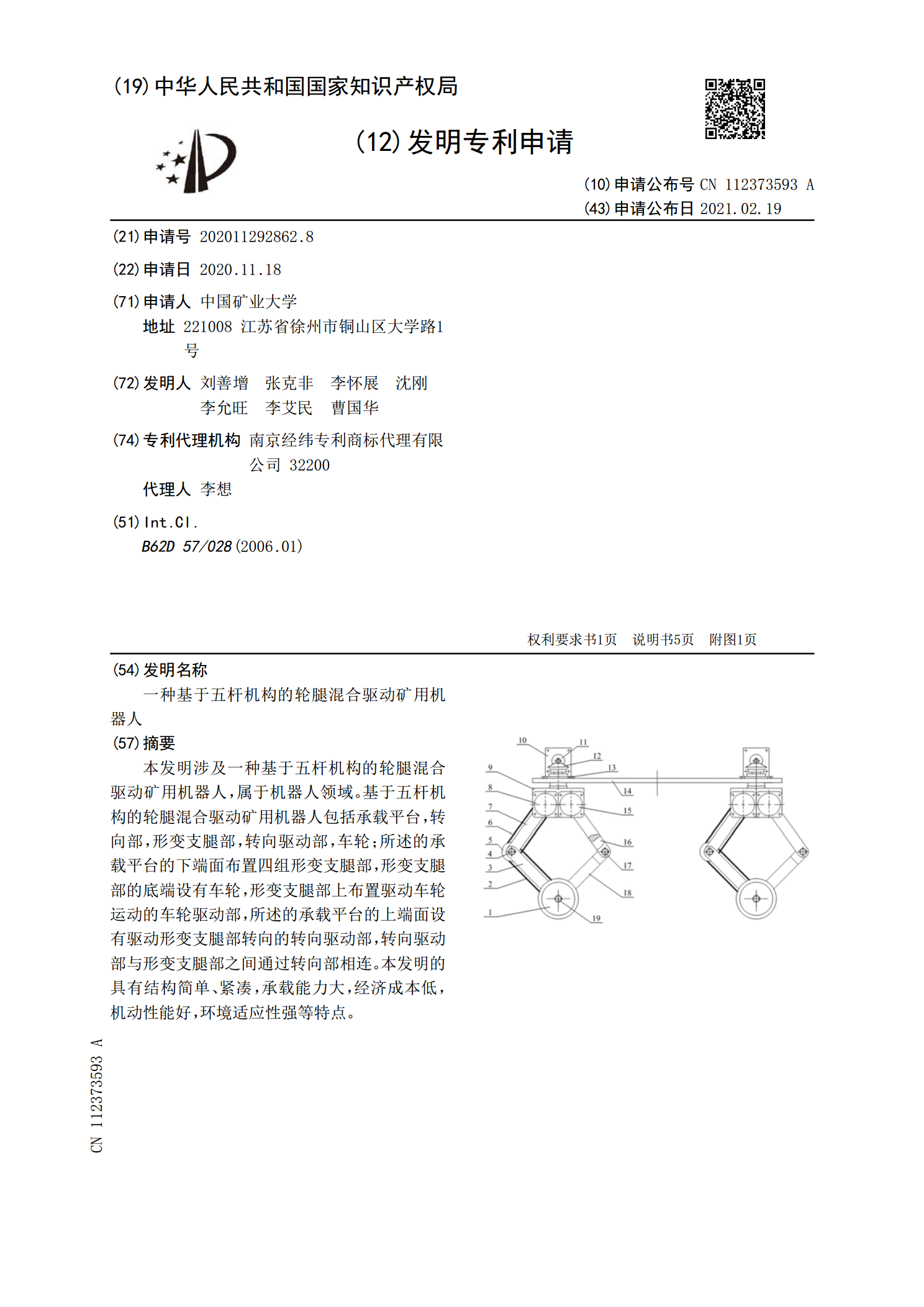
本发明涉及一种基于五杆机构的轮腿混合驱动矿用机器人,属于机器人领域。基于五杆机构的轮腿混合驱动矿用机器人包括承载平台,转向部,形变支腿部,转向驱动部,车轮;所述的承载平台的下端面布置四组形变支腿部,形变支腿部的底端设有车轮,形变支腿部上布置驱动车轮运动的车轮驱动部,所述的承载平台的上端面设有驱动形变支腿部转向的转向驱动部,转向驱动部与形变支腿部之间通过转向部相连。本发明的具有结构简单、紧凑,承载能力大,经济成本低,机动性能好,环境适应性强等特点。

混合驱动五杆机构的分析与综合.docx
混合驱动五杆机构的分析与综合摘要:混合驱动技术已经成为当今汽车工程的主流趋势。驱动系统的设计和优化在提高汽车的燃油经济性、降低废气排放方面具有重要的意义。本文主要分析了五杆机构在混合驱动中的应用,在此基础上对其进行了优化设计和综合分析。通过分析和实验验证,本文得出结论:五杆机构在混合动力驱动中具有较好的适用性和优越性能。关键词:混合驱动、五杆机构、优化设计、综合分析、性能评价一、引言近年来,混合动力驱动系统成为车辆工程领域的热点问题。混合动力的优点在于提高汽车的燃油经济性、降低废气排放,符合环保节能的要求

一种足式机器人驱动腿机构.pdf
本发明提供一种足式机器人驱动腿机构,属于足式机器人技术领域。该驱动腿机构包括腿支架、大腿骨、大腿前摆缸、大腿前拉索、大腿前滑轮、小腿前滑轮、小腿前拉索、小腿前摆缸、关节垫、小腿骨、球形足、小腿后拉索、小腿后摆缸、小腿后滑轮、大腿后滑轮、大腿后拉索、大腿后摆缸、膝关节柱、髋关节柱;腿支架与髋关节柱铰接组成髋关节,大腿骨上端与髋关节柱固连,关节垫位于大腿骨的下端并与膝关节柱铰接,大腿骨、关节垫及膝关节柱组成膝关节,小腿骨上端与膝关节柱固连,小腿骨下端与球形足固连。本发明具有结构紧凑、重量轻、能耗小、易实现快速
一种单驱动六杆机构可变形轮越障机器人.pdf
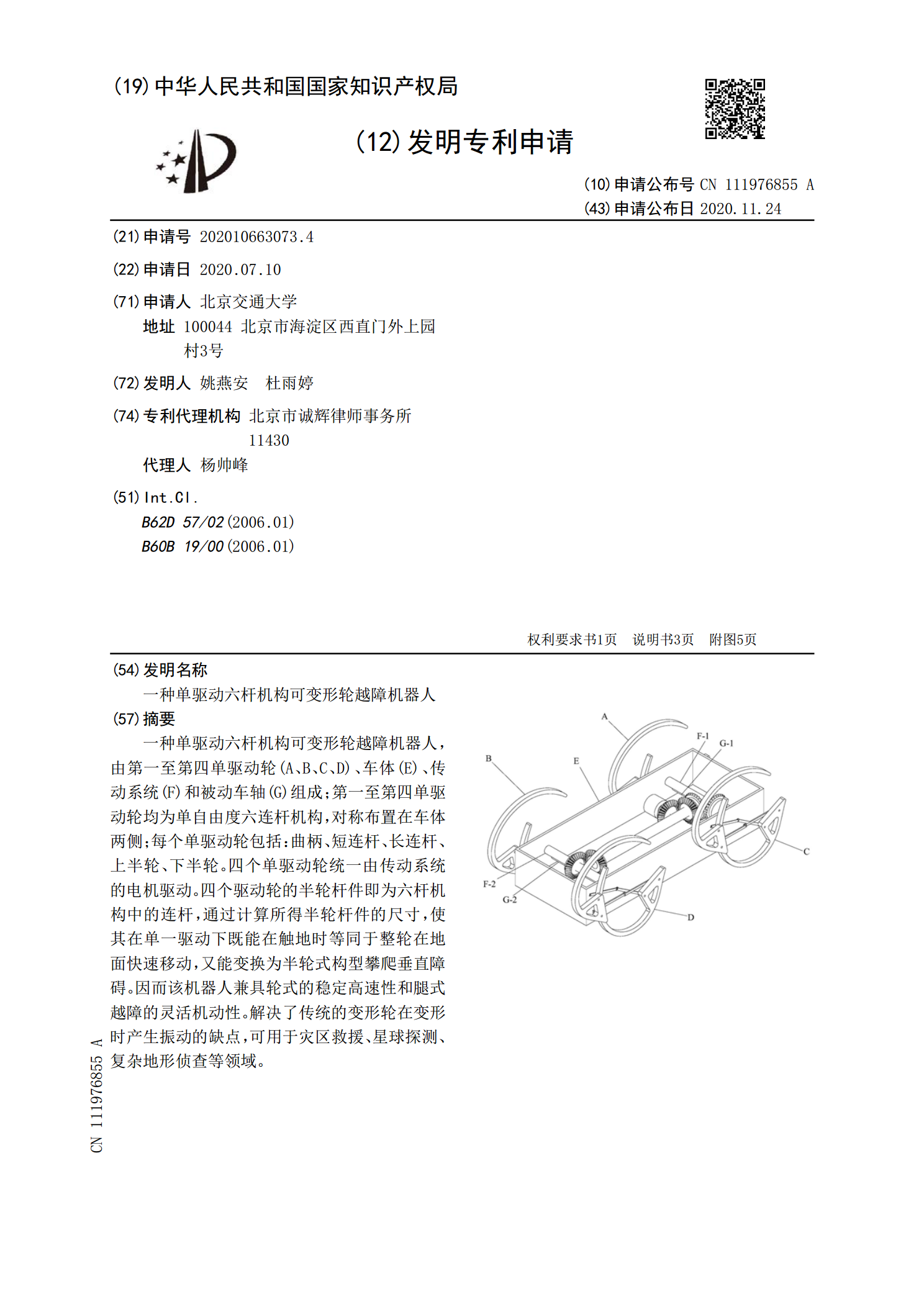
一种单驱动六杆机构可变形轮越障机器人,由第一至第四单驱动轮(A、B、C、D)、车体(E)、传动系统(F)和被动车轴(G)组成;第一至第四单驱动轮均为单自由度六连杆机构,对称布置在车体两侧;每个单驱动轮包括:曲柄、短连杆、长连杆、上半轮、下半轮。四个单驱动轮统一由传动系统的电机驱动。四个驱动轮的半轮杆件即为六杆机构中的连杆,通过计算所得半轮杆件的尺寸,使其在单一驱动下既能在触地时等同于整轮在地面快速移动,又能变换为半轮式构型攀爬垂直障碍。因而该机器人兼具轮式的稳定高速性和腿式越障的灵活机动性。解决了传统的变
一种基于齿轮五杆机构驱动的机翼前缘变弯度机构.pdf
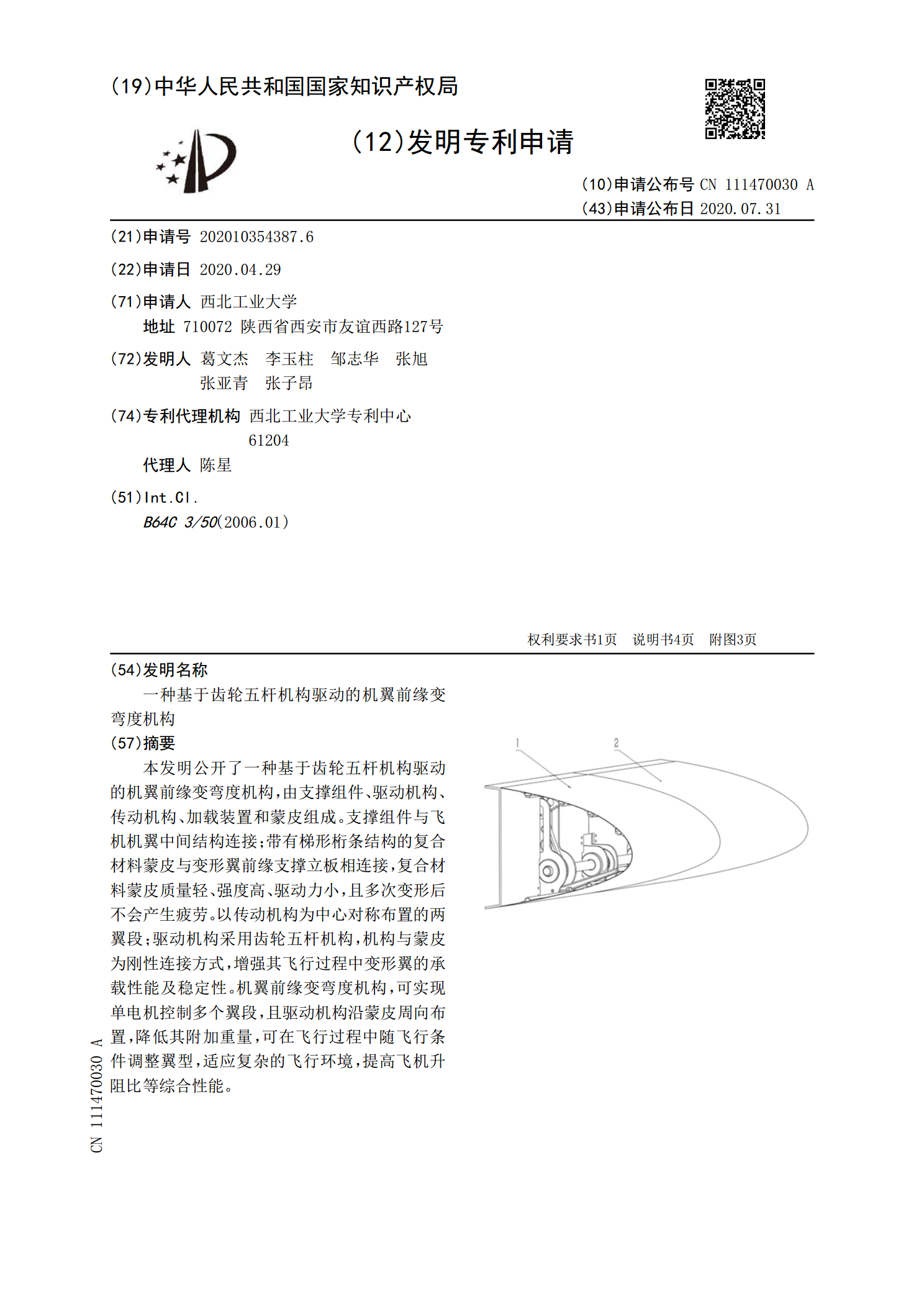
本发明公开了一种基于齿轮五杆机构驱动的机翼前缘变弯度机构,由支撑组件、驱动机构、传动机构、加载装置和蒙皮组成。支撑组件与飞机机翼中间结构连接;带有梯形桁条结构的复合材料蒙皮与变形翼前缘支撑立板相连接,复合材料蒙皮质量轻、强度高、驱动力小,且多次变形后不会产生疲劳。以传动机构为中心对称布置的两翼段;驱动机构采用齿轮五杆机构,机构与蒙皮为刚性连接方式,增强其飞行过程中变形翼的承载性能及稳定性。机翼前缘变弯度机构,可实现单电机控制多个翼段,且驱动机构沿蒙皮周向布置,降低其附加重量,可在飞行过程中随飞行条件调整翼