
一种单驱动六杆机构可变形轮越障机器人.pdf

玉环****找我


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种单驱动六杆机构可变形轮越障机器人.pdf
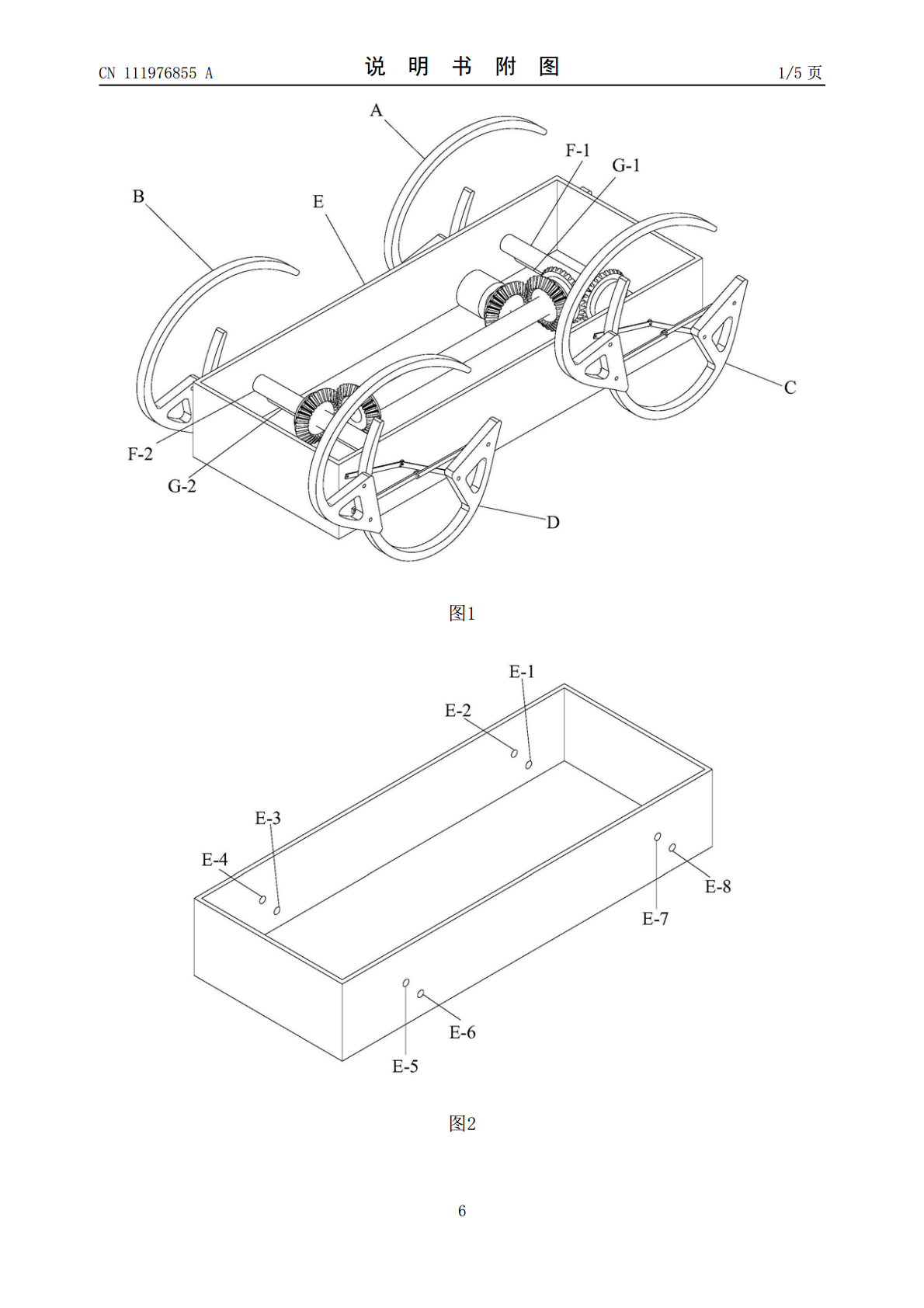
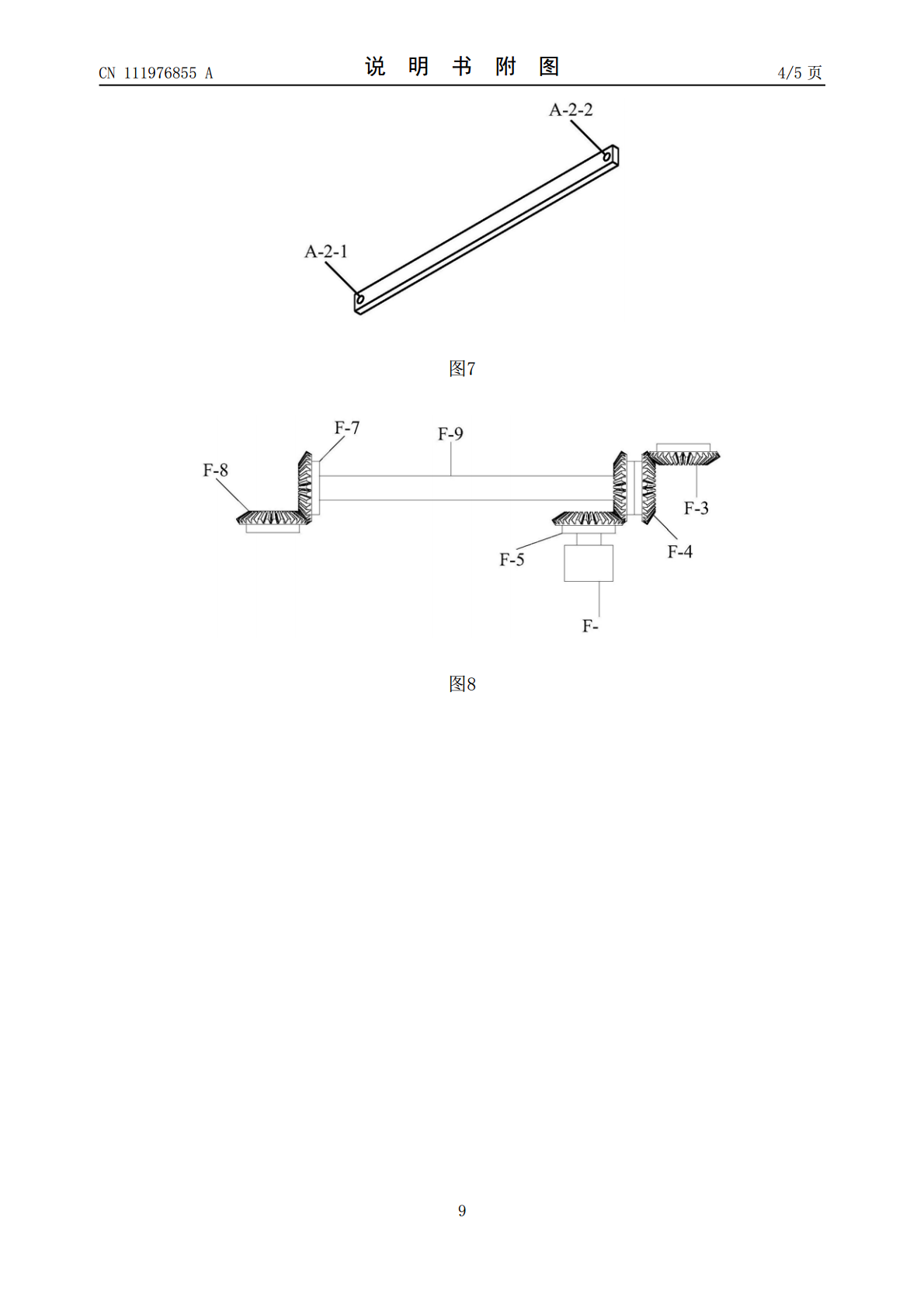
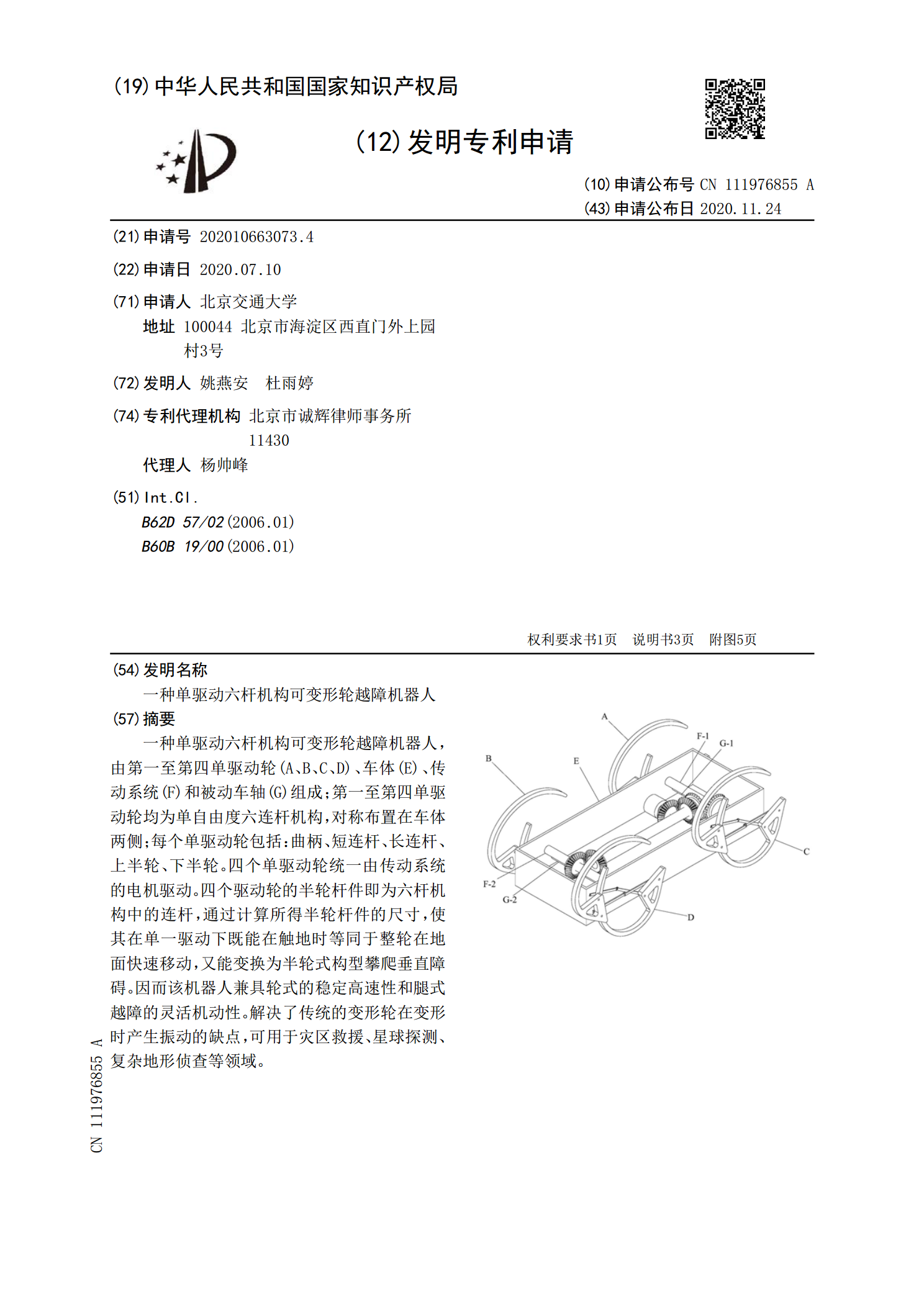
一种单驱动六杆机构可变形轮越障机器人,由第一至第四单驱动轮(A、B、C、D)、车体(E)、传动系统(F)和被动车轴(G)组成;第一至第四单驱动轮均为单自由度六连杆机构,对称布置在车体两侧;每个单驱动轮包括:曲柄、短连杆、长连杆、上半轮、下半轮。四个单驱动轮统一由传动系统的电机驱动。四个驱动轮的半轮杆件即为六杆机构中的连杆,通过计算所得半轮杆件的尺寸,使其在单一驱动下既能在触地时等同于整轮在地面快速移动,又能变换为半轮式构型攀爬垂直障碍。因而该机器人兼具轮式的稳定高速性和腿式越障的灵活机动性。解决了传统的变
一种欠驱动变形轮式越障机器人.pdf
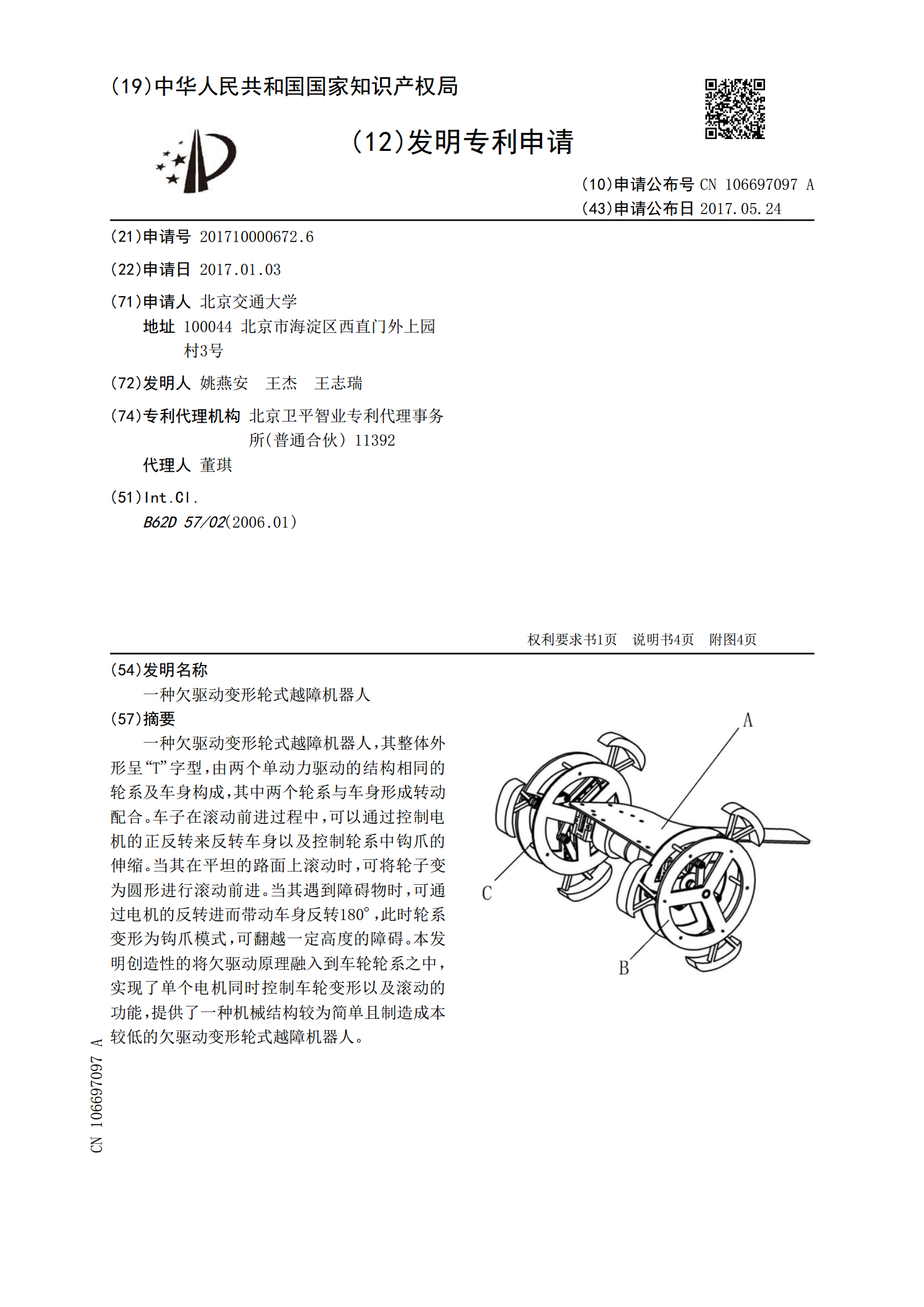
一种欠驱动变形轮式越障机器人,其整体外形呈“T”字型,由两个单动力驱动的结构相同的轮系及车身构成,其中两个轮系与车身形成转动配合。车子在滚动前进过程中,可以通过控制电机的正反转来反转车身以及控制轮系中钩爪的伸缩。当其在平坦的路面上滚动时,可将轮子变为圆形进行滚动前进。当其遇到障碍物时,可通过电机的反转进而带动车身反转180°,此时轮系变形为钩爪模式,可翻越一定高度的障碍。本发明创造性的将欠驱动原理融入到车轮轮系之中,实现了单个电机同时控制车轮变形以及滚动的功能,提供了一种机械结构较为简单且制造成本较低的欠

采用单节变形履带机构的越障轮椅机器人机理研究.docx
采用单节变形履带机构的越障轮椅机器人机理研究随着社会的发展和人民生活水平的提高,越来越多的人需要使用轮椅来代替腿部受伤或行动不便。随着机器人技术的快速发展,越障轮椅机器人成为了目前研究的热点之一。本文将针对采用单节变形履带机构的越障轮椅机器人机理进行详细研究并探讨其优缺点。一、越障轮椅机器人的背景介绍越障轮椅机器人是一种能够克服道路不平坦、不规则地形等障碍、实现安全、快速、便捷、智能移动的轮椅机器人,是一种融合了电子技术、机械工程、计算机科学等多个学科的智能机器人。越障轮椅机器人不仅可以提高运动员的训练效

采用单节变形履带机构的越障轮椅机器人机理研究的中期报告.docx
采用单节变形履带机构的越障轮椅机器人机理研究的中期报告摘要:本报告介绍了采用单节变形履带机构的越障轮椅机器人机理的中期研究成果。该机构采用变形履带代替前轮和后轮,使机器人能够克服不同高度和倾斜角度的地形障碍,并提高了机器人的稳定性和运动灵活性。本文主要介绍了机构结构设计、运动学模型建立以及控制策略的初步探索。机构结构设计方面,本文提出了一种使用两个变副履带驱动机构的越障轮椅机器人设计方案,并详细分析了机构的结构组成和运动特性。运动学模型建立方面,本文通过分析变形履带的几何变化,建立了机器人的运动学模型,并
一种基于五杆机构的轮腿混合驱动矿用机器人.pdf
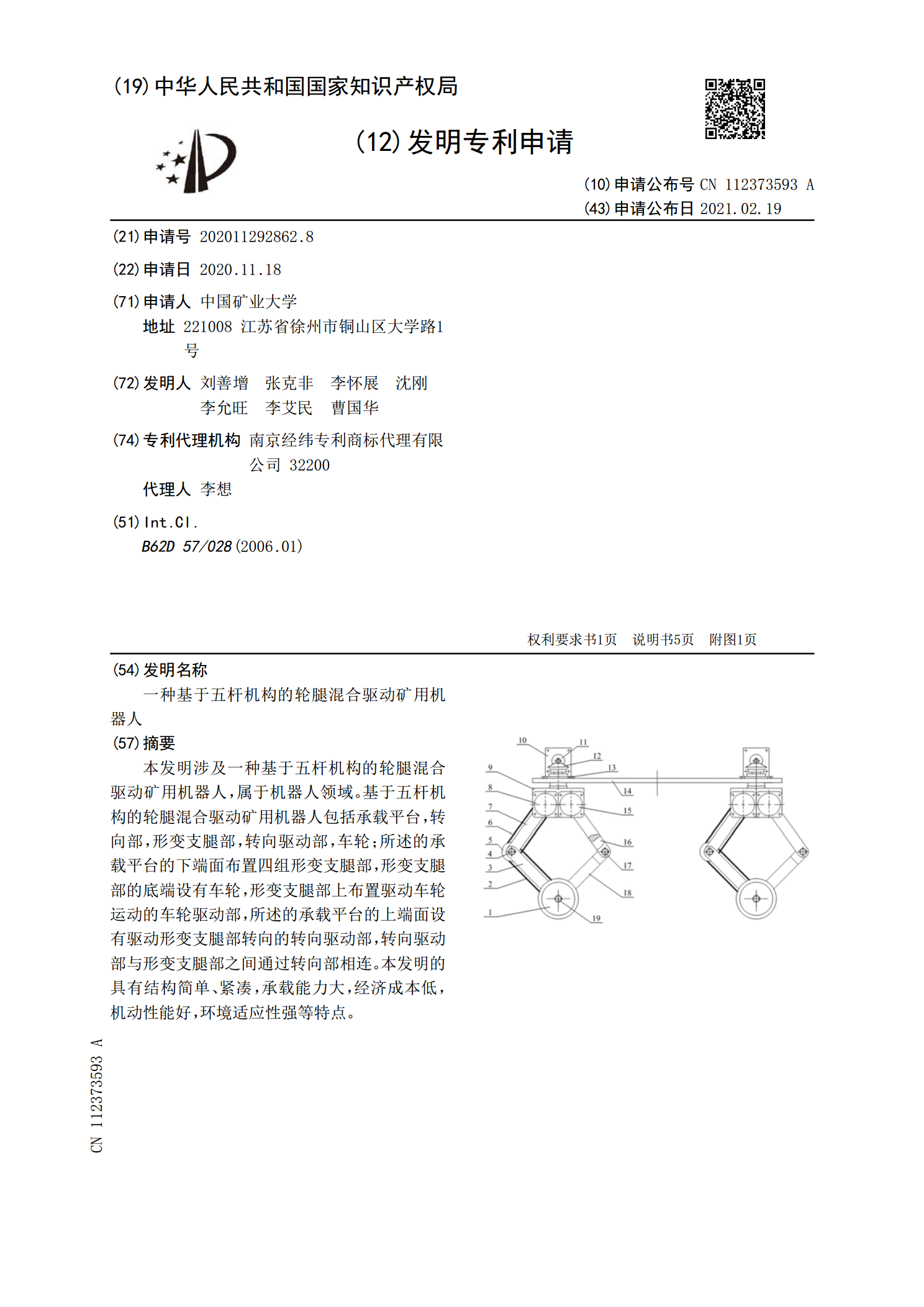
本发明涉及一种基于五杆机构的轮腿混合驱动矿用机器人,属于机器人领域。基于五杆机构的轮腿混合驱动矿用机器人包括承载平台,转向部,形变支腿部,转向驱动部,车轮;所述的承载平台的下端面布置四组形变支腿部,形变支腿部的底端设有车轮,形变支腿部上布置驱动车轮运动的车轮驱动部,所述的承载平台的上端面设有驱动形变支腿部转向的转向驱动部,转向驱动部与形变支腿部之间通过转向部相连。本发明的具有结构简单、紧凑,承载能力大,经济成本低,机动性能好,环境适应性强等特点。