
一种方舱单舱自动调平系统及调平方法.pdf

婀娜****aj


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种方舱单舱自动调平系统及调平方法.pdf
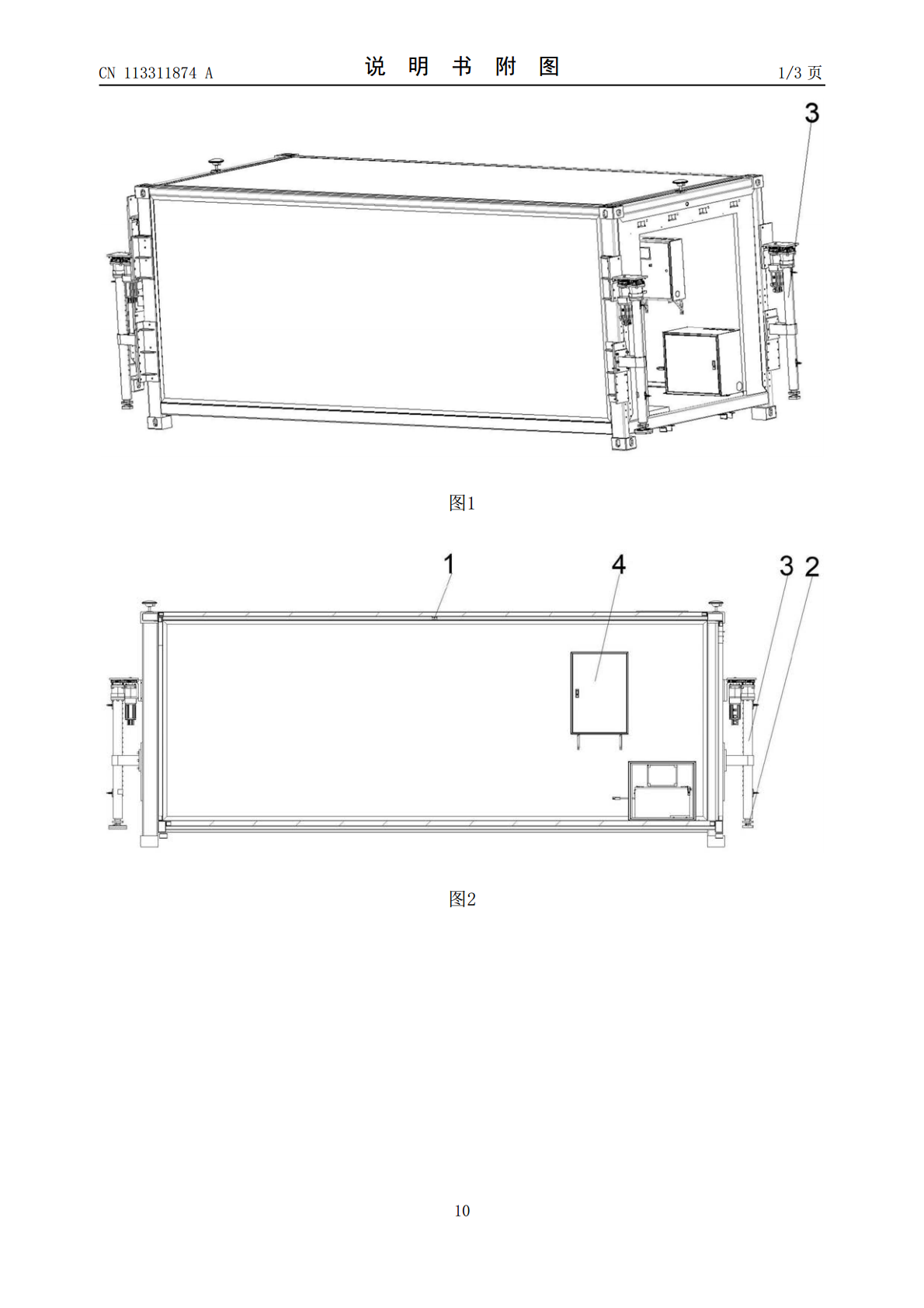
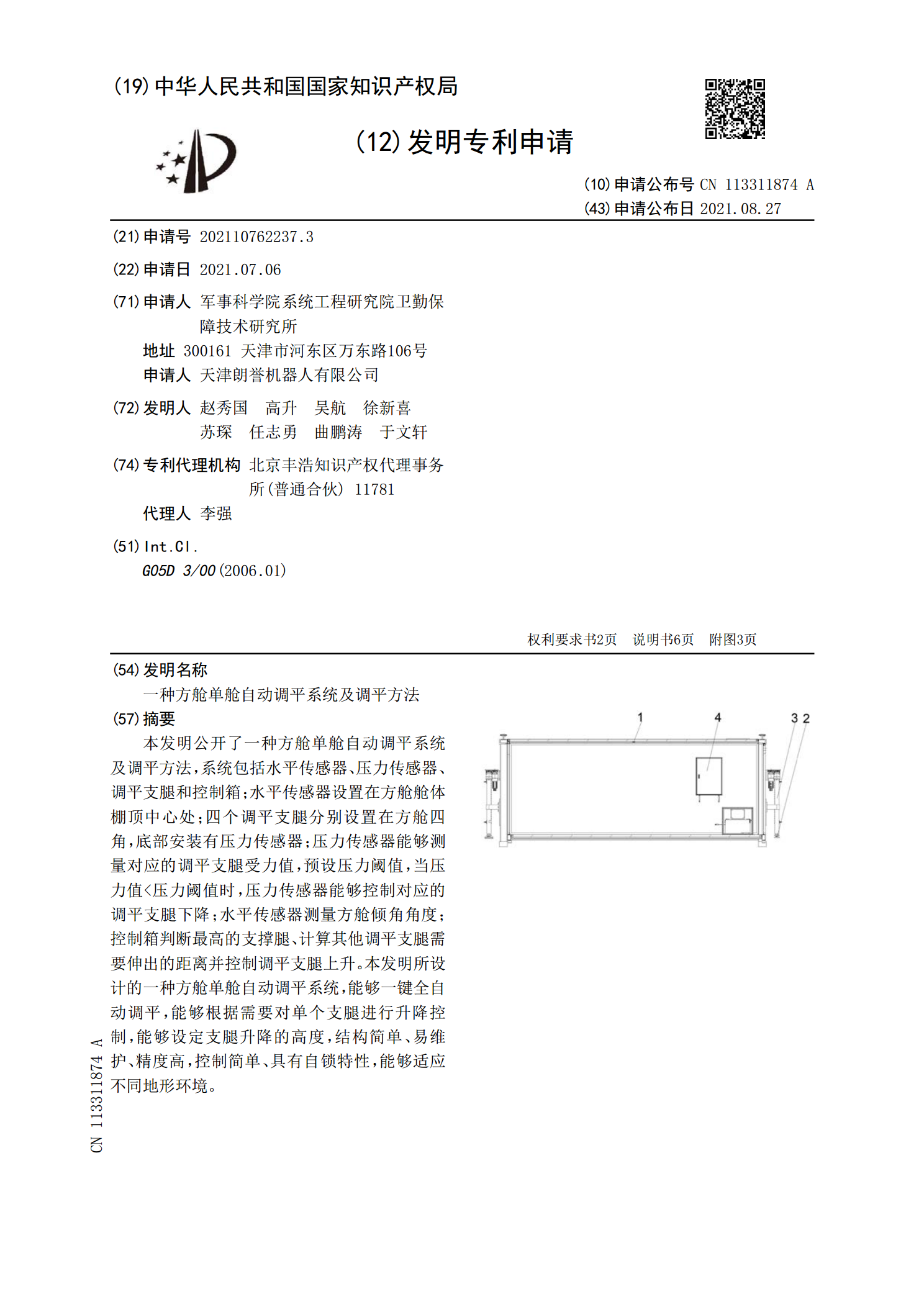
本发明公开了一种方舱单舱自动调平系统及调平方法,系统包括水平传感器、压力传感器、调平支腿和控制箱;水平传感器设置在方舱舱体棚顶中心处;四个调平支腿分别设置在方舱四角,底部安装有压力传感器;压力传感器能够测量对应的调平支腿受力值,预设压力阈值,当压力值支腿下降;水平传感器测量方舱倾角角度;控制箱判断最高的支撑腿、计算其他调平支腿需要伸出的距离并控制调平支腿上升。本发明所设计的一种方舱单舱自动调平系统,能够一键全自动调平,能够根据需要对单个支腿进行升降控制,能够设定支腿升降的高度,结构简单、易维护、精度高,控
一种方舱双舱自动调平系统及调平方法.pdf
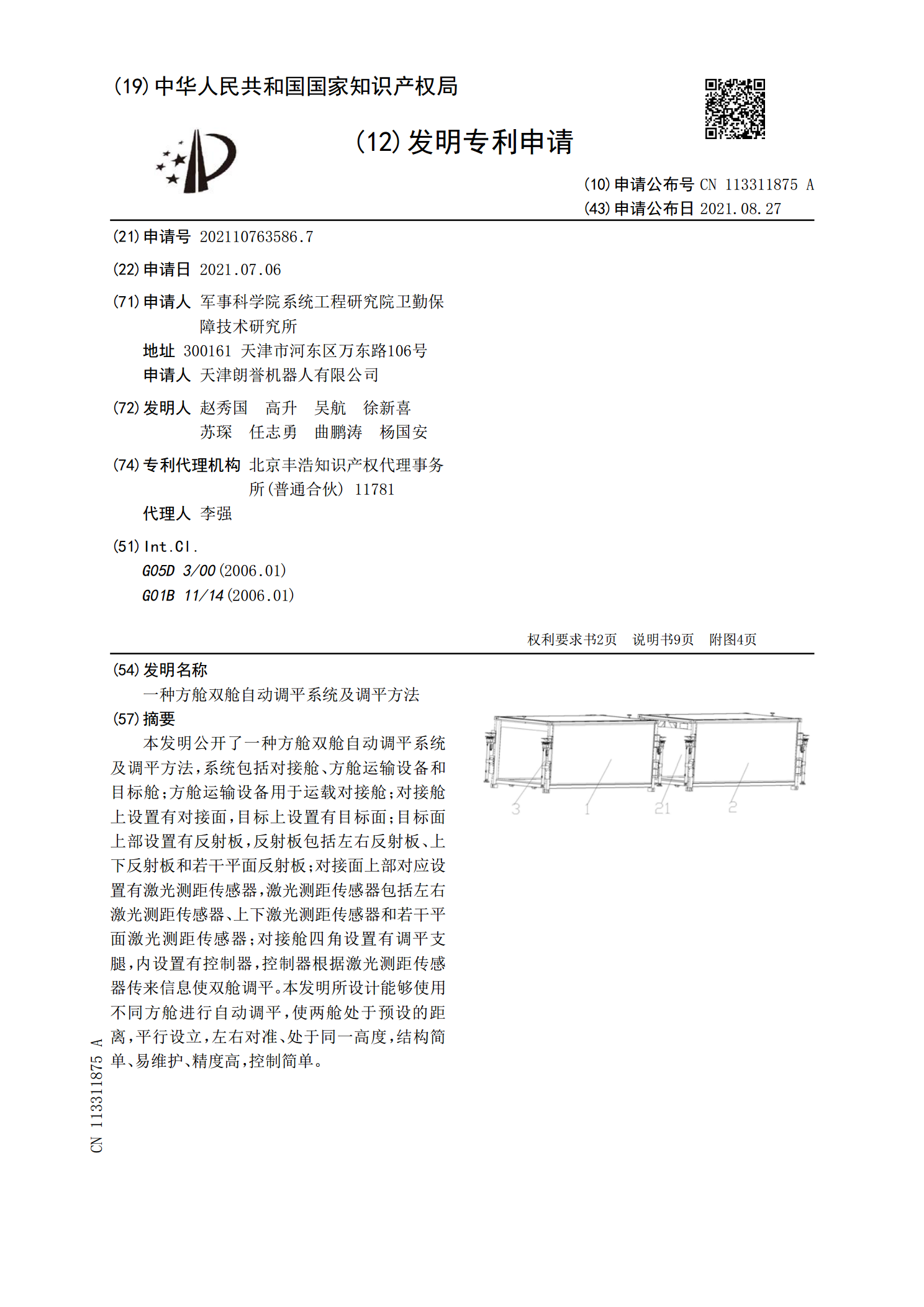
本发明公开了一种方舱双舱自动调平系统及调平方法,系统包括对接舱、方舱运输设备和目标舱;方舱运输设备用于运载对接舱;对接舱上设置有对接面,目标上设置有目标面;目标面上部设置有反射板,反射板包括左右反射板、上下反射板和若干平面反射板;对接面上部对应设置有激光测距传感器,激光测距传感器包括左右激光测距传感器、上下激光测距传感器和若干平面激光测距传感器;对接舱四角设置有调平支腿,内设置有控制器,控制器根据激光测距传感器传来信息使双舱调平。本发明所设计能够使用不同方舱进行自动调平,使两舱处于预设的距离,平行设立,左
一种方舱自动支撑调平系统及其调平方法.pdf
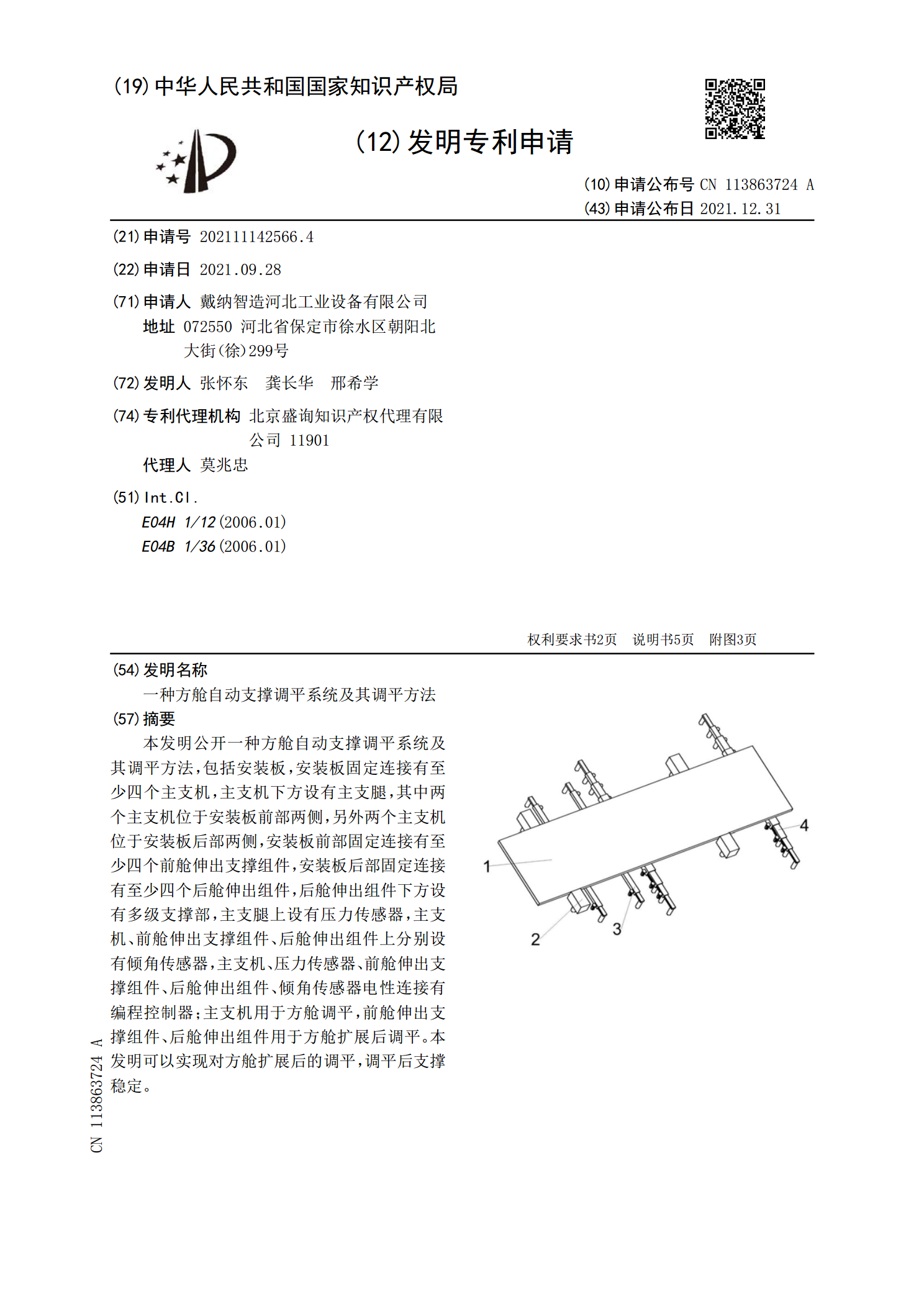
本发明公开一种方舱自动支撑调平系统及其调平方法,包括安装板,安装板固定连接有至少四个主支机,主支机下方设有主支腿,其中两个主支机位于安装板前部两侧,另外两个主支机位于安装板后部两侧,安装板前部固定连接有至少四个前舱伸出支撑组件,安装板后部固定连接有至少四个后舱伸出组件,后舱伸出组件下方设有多级支撑部,主支腿上设有压力传感器,主支机、前舱伸出支撑组件、后舱伸出组件上分别设有倾角传感器,主支机、压力传感器、前舱伸出支撑组件、后舱伸出组件、倾角传感器电性连接有编程控制器;主支机用于方舱调平,前舱伸出支撑组件、后
一种车架自动调平系统、调平及安全控制方法.pdf
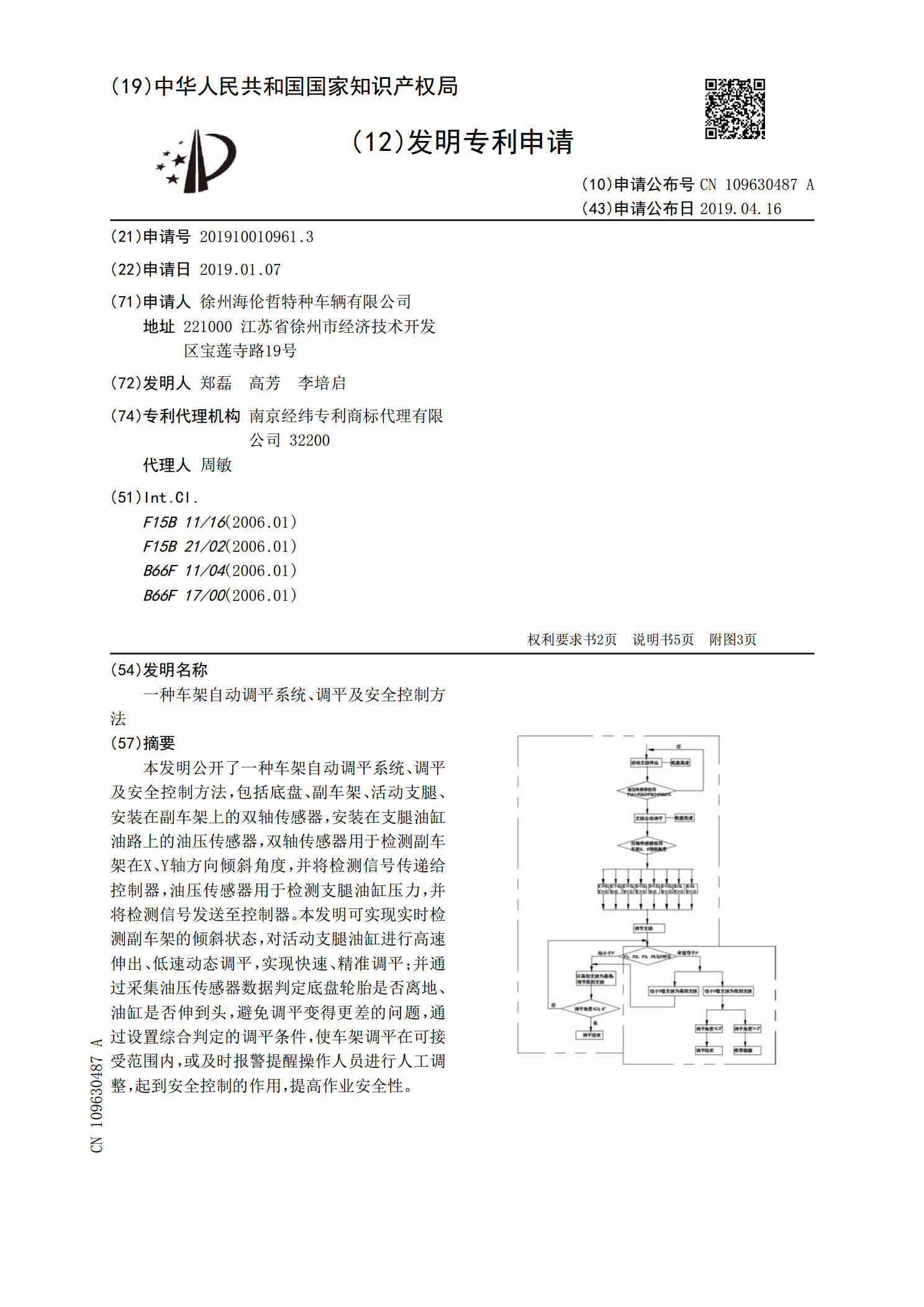
本发明公开了一种车架自动调平系统、调平及安全控制方法,包括底盘、副车架、活动支腿、安装在副车架上的双轴传感器,安装在支腿油缸油路上的油压传感器,双轴传感器用于检测副车架在X、Y轴方向倾斜角度,并将检测信号传递给控制器,油压传感器用于检测支腿油缸压力,并将检测信号发送至控制器。本发明可实现实时检测副车架的倾斜状态,对活动支腿油缸进行高速伸出、低速动态调平,实现快速、精准调平;并通过采集油压传感器数据判定底盘轮胎是否离地、油缸是否伸到头,避免调平变得更差的问题,通过设置综合判定的调平条件,使车架调平在可接受范

一种机电式自动调平系统及调平方法.pdf
本发明涉及自动化控制技术领域,尤其涉及一种机电式自动调平系统及调平方法,调平系统包括控制模块,控制模块连接有不少于3个的用于支撑车载平台的伺服电动支腿、双轴倾角传感器、显示屏、蜂鸣器和控制终端,以及分别为控制模块、伺服电动支腿、双轴倾角传感器、显示屏、蜂鸣器和控制终端供电的电源模块;控制模块还连接有平面度激光测量模块。本发明提供的一种机电式自动调平系统及调平方法具有调平速度快,调平精度高,能实现自动、半自动、手动调平的自由切换且操作简单,自动化程度较高,体积较小,可靠性高的优点。