
储罐焊缝打磨机器人.pdf

Ja****20


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

储罐焊缝打磨机器人.pdf
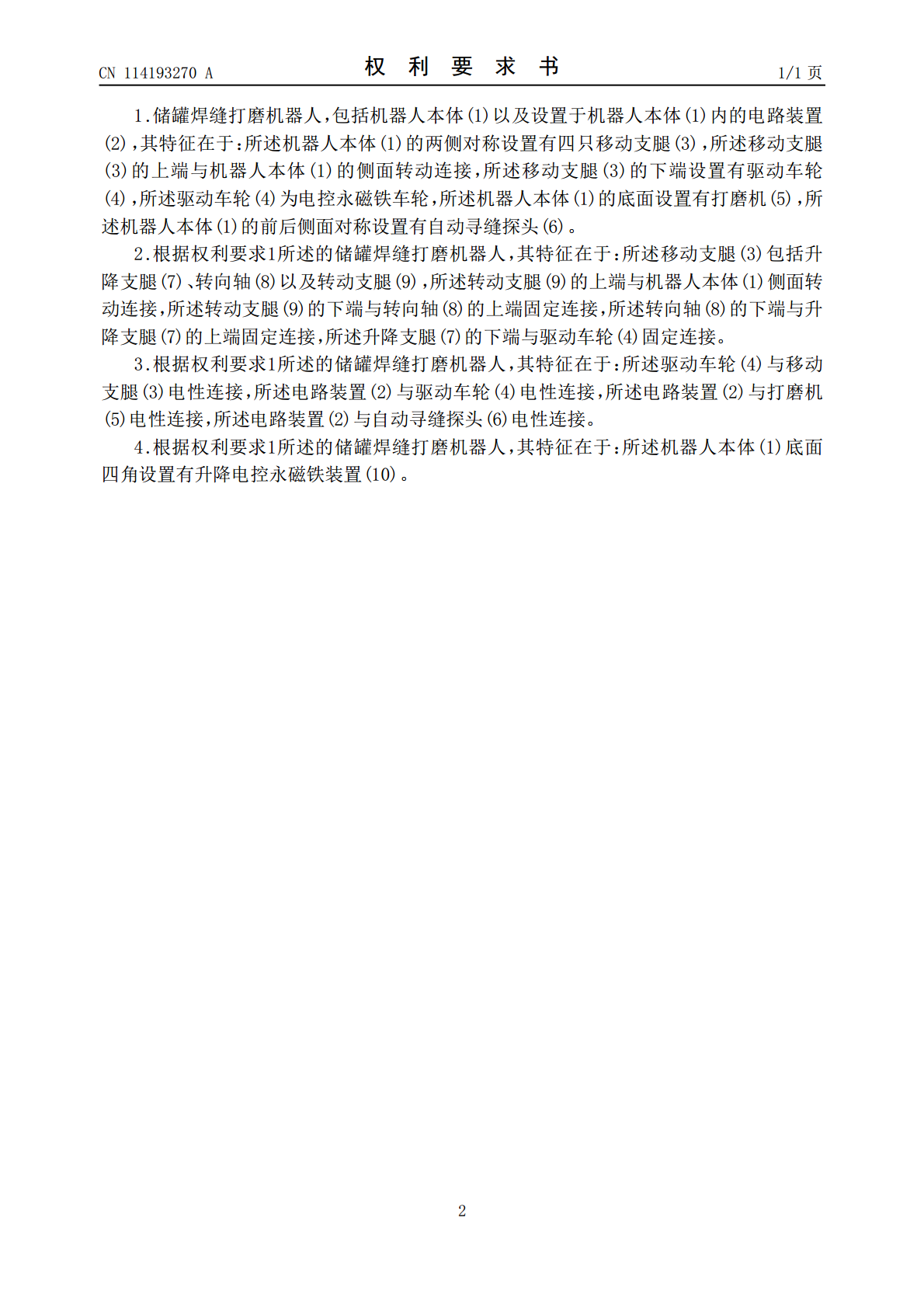
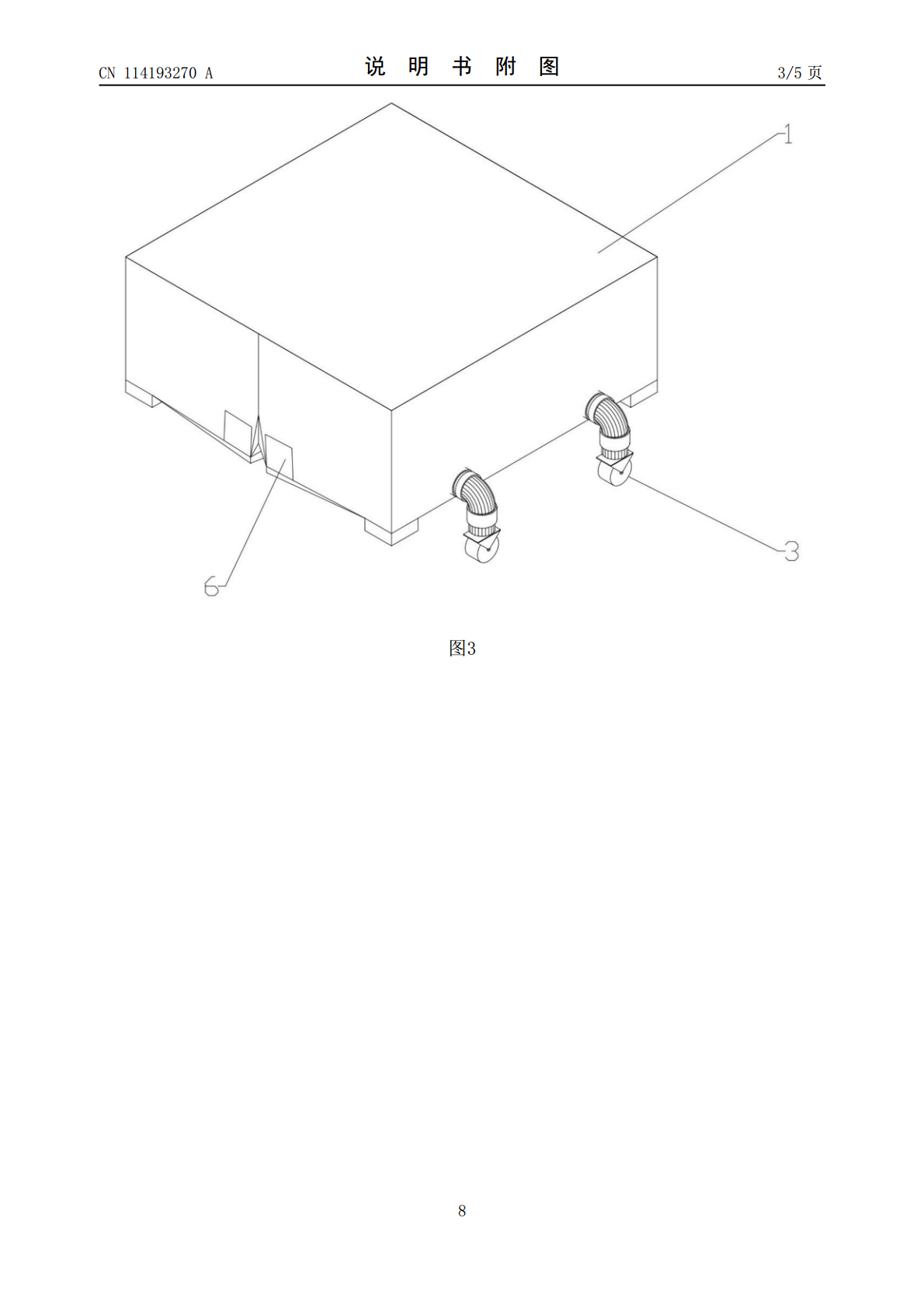
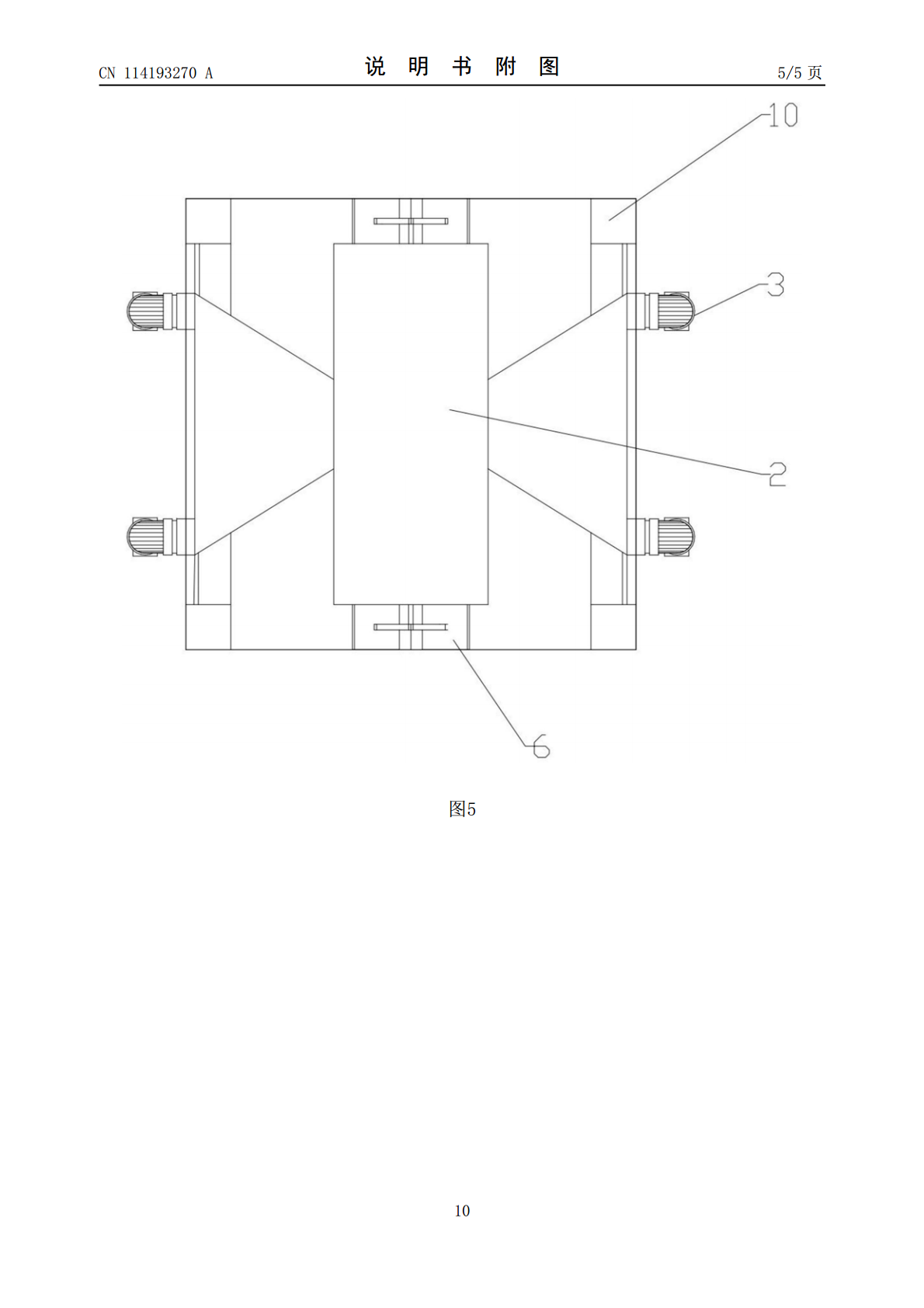
本发明公开了储罐焊缝打磨机器人,包括机器人本体以及设置于机器人本体内的电路装置,机器人本体的两侧对称设置有四只移动支腿,移动支腿的下端设置有驱动车轮,驱动车轮为电控永磁铁车轮,机器人本体的底面设置有打磨机,机器人本体的前后侧面对称设置有自动寻缝探头。本发明与现有技术相比的优点在于:本发明大大提升了作业进度,机器人可长时间作业,相比于传统人工打磨可提升80%以上的时间进度。并且保证了焊缝打磨精度与质量,配备高精度自动寻找焊缝探头系统,焊缝打磨通过率高达99%以上,远高于人工打磨。降低了安全风险,消除了搭建脚
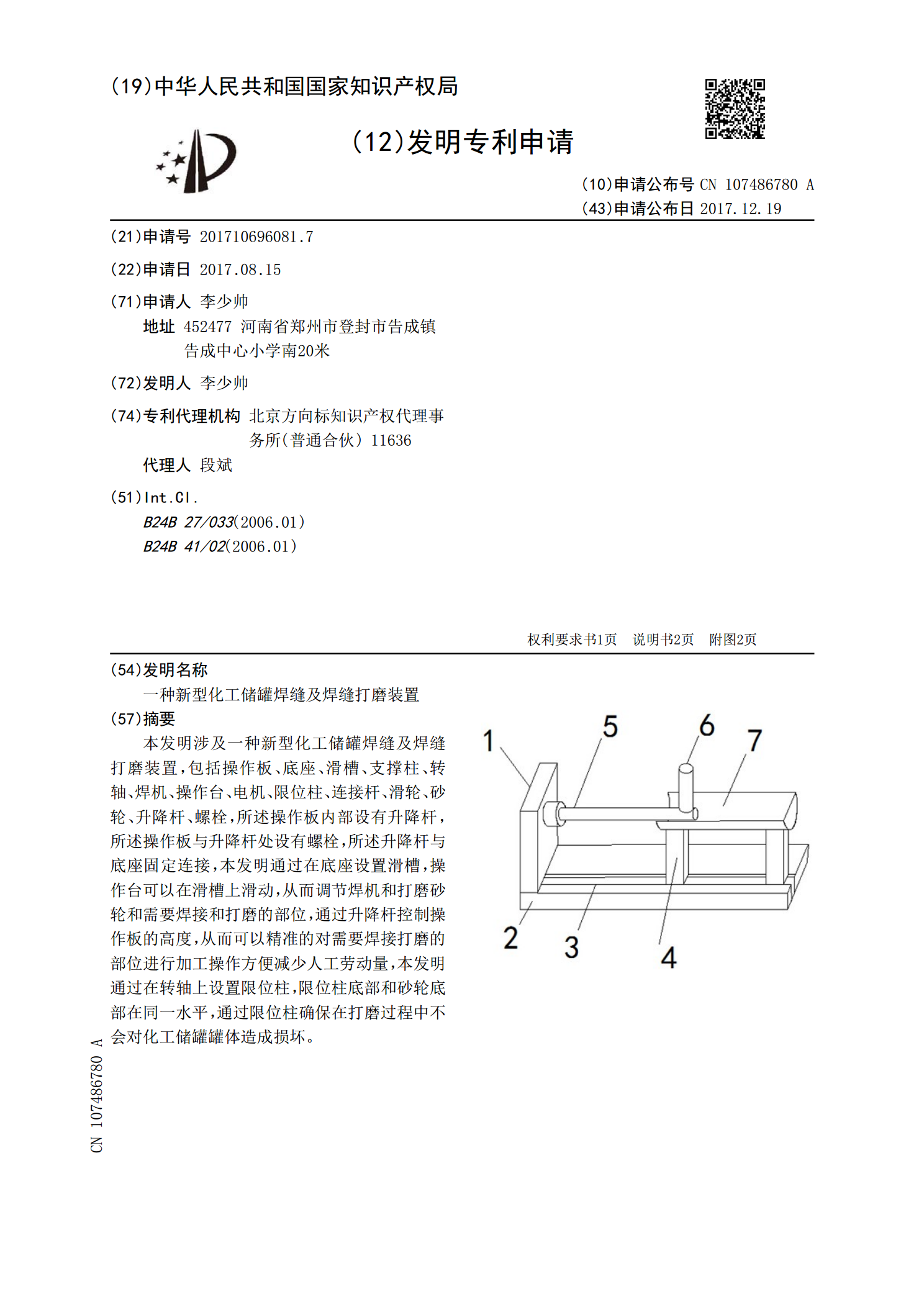
一种新型化工储罐焊缝及焊缝打磨装置.pdf
本发明涉及一种新型化工储罐焊缝及焊缝打磨装置,包括操作板、底座、滑槽、支撑柱、转轴、焊机、操作台、电机、限位柱、连接杆、滑轮、砂轮、升降杆、螺栓,所述操作板内部设有升降杆,所述操作板与升降杆处设有螺栓,所述升降杆与底座固定连接,本发明通过在底座设置滑槽,操作台可以在滑槽上滑动,从而调节焊机和打磨砂轮和需要焊接和打磨的部位,通过升降杆控制操作板的高度,从而可以精准的对需要焊接打磨的部位进行加工操作方便减少人工劳动量,本发明通过在转轴上设置限位柱,限位柱底部和砂轮底部在同一水平,通过限位柱确保在打磨过程中不会

一种卧式储罐罐体及罐车罐体的环焊缝打磨机器人.pdf
本发明涉及一种卧式储罐罐体及罐车罐体的环焊缝打磨机器人。目的是提供的机器人应能有效进行储罐和罐车内外表面的环焊缝打磨,具有打磨质量好、工作效率高以及操作健康安全的特点。技术方案是:一种卧式储罐罐体或罐车罐体的环焊缝打磨机器人,其特征在于该机器人包括可移动地吸附在罐体表面的机器人框架、安装在机器人框架上用于打磨环焊缝的打磨机构以及驱动机器人框架在罐体表面行走的行走机构;所述打磨机构包括布置在机器人框架底端以对罐体表面环焊缝打磨的钢丝刷组以及驱动钢丝刷组的打磨电机;所述行走机构包括安装在机器人框架底端的脚轮和
沈阳莱茵焊缝打磨机器人方案120201.ppt
30六月2024机器外形尺寸长x宽x高=1200x1100x19001、下料:人工将打磨好的工件取下,2、上料:人工将毛坯件装到夹具中卡紧,3、启动工作台,使其转动180度,4、5D机械手对6个位置进行打磨,含初打磨和补充后精磨。5、机械手臂上的精密距离传感器随时可以测量打磨精度,如果满足要求就进入抛光过程,否则继续打磨。6、先换上抛光工具,然后根据测量值开始抛光到理想的位置。7、再次测量抛光精度,满足要求就结束,否则再抛光。循环1步骤,打磨循环工作时间在45秒以内每个工件。机器人打磨说明5轴机器人中XY

沈阳莱茵焊缝打磨机器人方案课件.ppt
沈阳莱茵焊缝打磨机器人方案120601机器外形尺寸长x宽x高=1200x1100x19001、下料:人工将打磨好的工件取下,2、上料:人工将毛坯件装到夹具中卡紧,3、启动工作台,使其转动180度,4、5D机械手对6个位置进行打磨,含初打磨和补充后精磨。5、机械手臂上的精密距离传感器随时可以测量打磨精度,如果满足要求就进入抛光过程,否则继续打磨。6、先换上抛光工具,然后根据测量值开始抛光到理想的位置。7、再次测量抛光精度,满足要求就结束,否则再抛光。循环1步骤,打磨循环工作时间在45秒以内每个工件。机器人打