
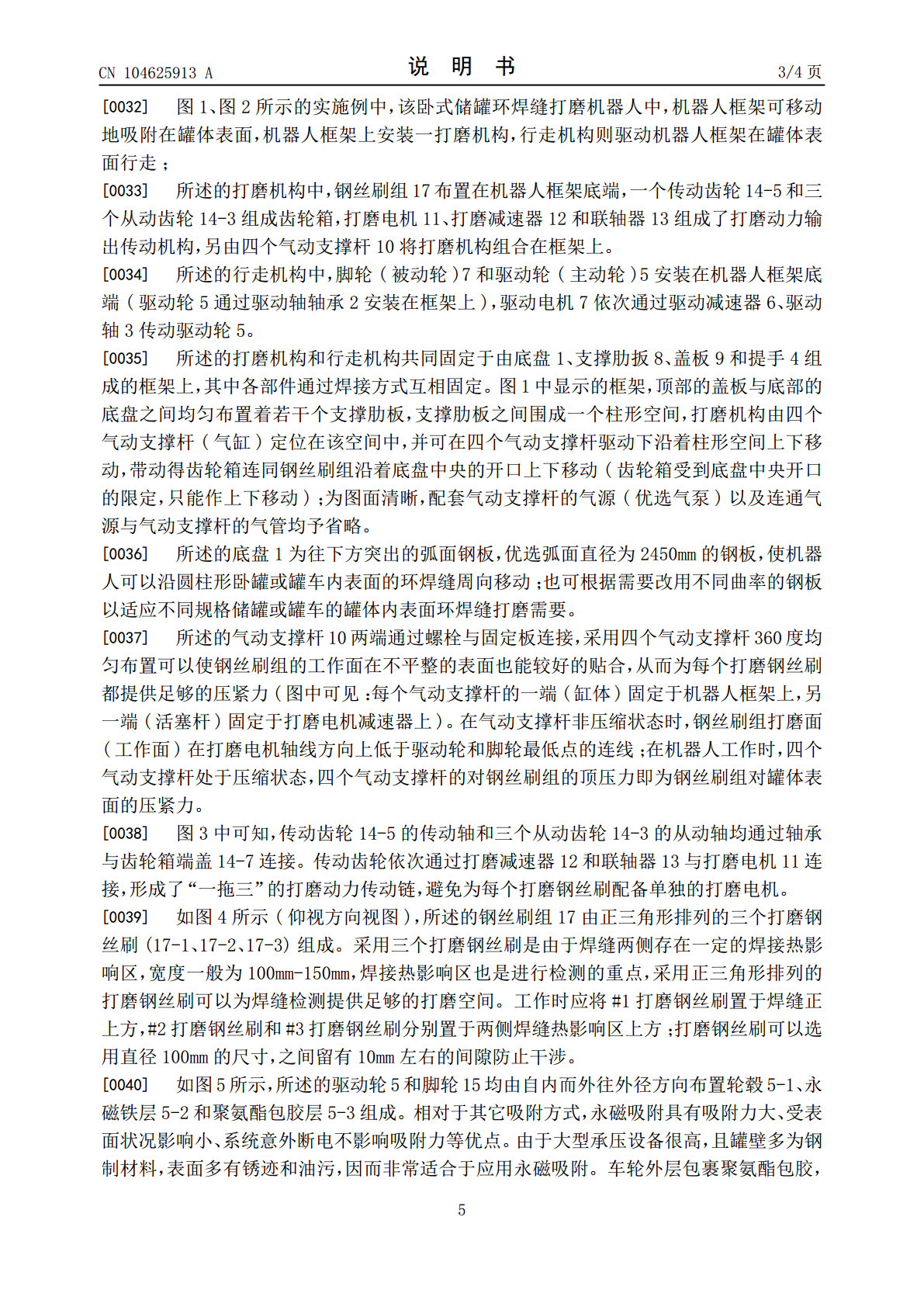
一种卧式储罐罐体及罐车罐体的环焊缝打磨机器人.pdf

星菱****23


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种卧式储罐罐体及罐车罐体的环焊缝打磨机器人.pdf
本发明涉及一种卧式储罐罐体及罐车罐体的环焊缝打磨机器人。目的是提供的机器人应能有效进行储罐和罐车内外表面的环焊缝打磨,具有打磨质量好、工作效率高以及操作健康安全的特点。技术方案是:一种卧式储罐罐体或罐车罐体的环焊缝打磨机器人,其特征在于该机器人包括可移动地吸附在罐体表面的机器人框架、安装在机器人框架上用于打磨环焊缝的打磨机构以及驱动机器人框架在罐体表面行走的行走机构;所述打磨机构包括布置在机器人框架底端以对罐体表面环焊缝打磨的钢丝刷组以及驱动钢丝刷组的打磨电机;所述行走机构包括安装在机器人框架底端的脚轮和

一种罐体焊缝打磨系统.pdf
本发明提出了一种罐体焊缝打磨系统,包括底座、支撑架、移动机构、安装框、外壁打磨机构和内壁打磨机构;支撑架安装在底座上,移动机构包括移动架、卷线轮、牵引绳和第一驱动装置;安装框包括第一安装柱、连接柱和第二安装柱,第一安装柱安装在移动架上,连接柱连接第一安装柱上部与第二安装柱上部;外壁打磨机构包括第一转轴、第一安装架、第一液压缸、主动轮、第二驱动装置、第一传动轮、第二传动轮和砂带;内壁打磨机构包括第三转轴、第二安装架、第二液压缸、千叶轮和第三驱动装置。本发明使用方便,可以适应不同大小的罐体,且罐体打磨效率高。
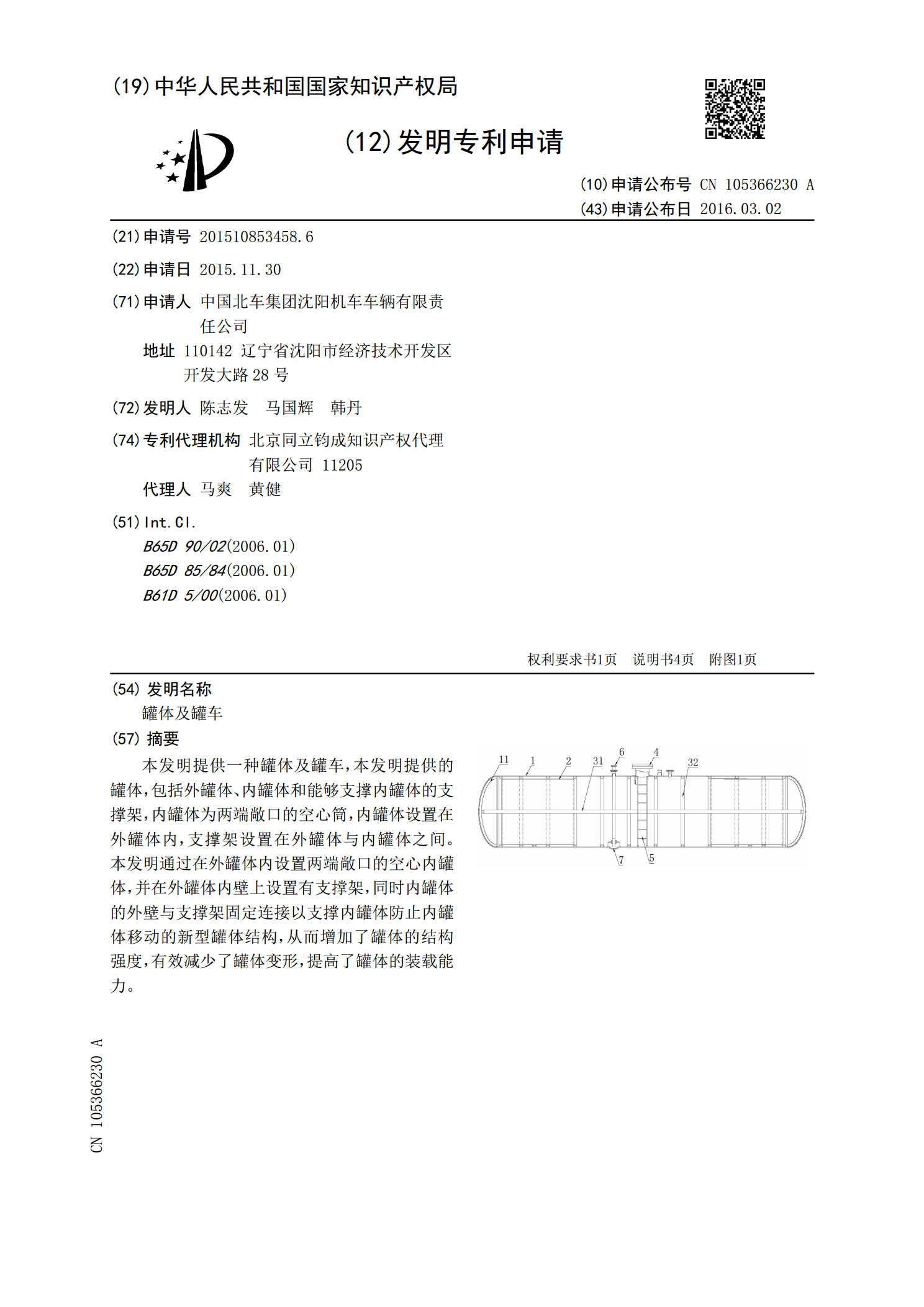
罐体及罐车.pdf
本发明提供一种罐体及罐车,本发明提供的罐体,包括外罐体、内罐体和能够支撑内罐体的支撑架,内罐体为两端敞口的空心筒,内罐体设置在外罐体内,支撑架设置在外罐体与内罐体之间。本发明通过在外罐体内设置两端敞口的空心内罐体,并在外罐体内壁上设置有支撑架,同时内罐体的外壁与支撑架固定连接以支撑内罐体防止内罐体移动的新型罐体结构,从而增加了罐体的结构强度,有效减少了罐体变形,提高了罐体的装载能力。

一种罐体焊缝滚压系统.pdf
本发明提出了一种罐体焊缝滚压系统,包括底座、安装柱、顶架、滚压机构和定位机构;安装柱安装在底座上方,顶架可移动安装在安装柱上方;滚压机构包括螺杆、第一驱动装置、移动架、连接轴、连接架、安装轴、滚压轮和液压缸,移动架上安装有第一滑轮组和第二滑轮组,定位机构包括定位座、定位柱和第二驱动装置,定定位柱上安装有由上至下延伸的齿条,顶架上可转动安装有齿轮,齿轮与齿条啮合。本发明使用方便,罐体不易晃动,滚压轮的滚压力度和滚压速度易于精确调整。

罐车罐体配重装置.pdf
本发明属于一种内置加热装置罐车生产时需用来平衡罐体的装置。它是在配重体两端连接卡带,卡带末端通过螺纹紧固器连接。本发明具有人优点是:采用配重装置来平衡罐车内置加热排管的重量,确保罐体在外环缝焊接过程中在滚轮架上平稳、匀速旋转,消除罐车加热排管产生的偏重影响,避免了偏负荷引起滚轮架的电机烧损,减少因焊接过程不稳定造成的焊接返修,满足埋弧自动焊要求,减少焊缝返修次数和长度,减轻了人力劳动强度,打通了生产瓶颈工序,保证了工序之间的流畅,使罐车生产线得以顺利生产,提高了罐体焊接质量和生产效率,消除了浪费,节约了生