
高空作业车及其控制方法.pdf

An****70

1/10

2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
高空作业车及其控制方法.pdf
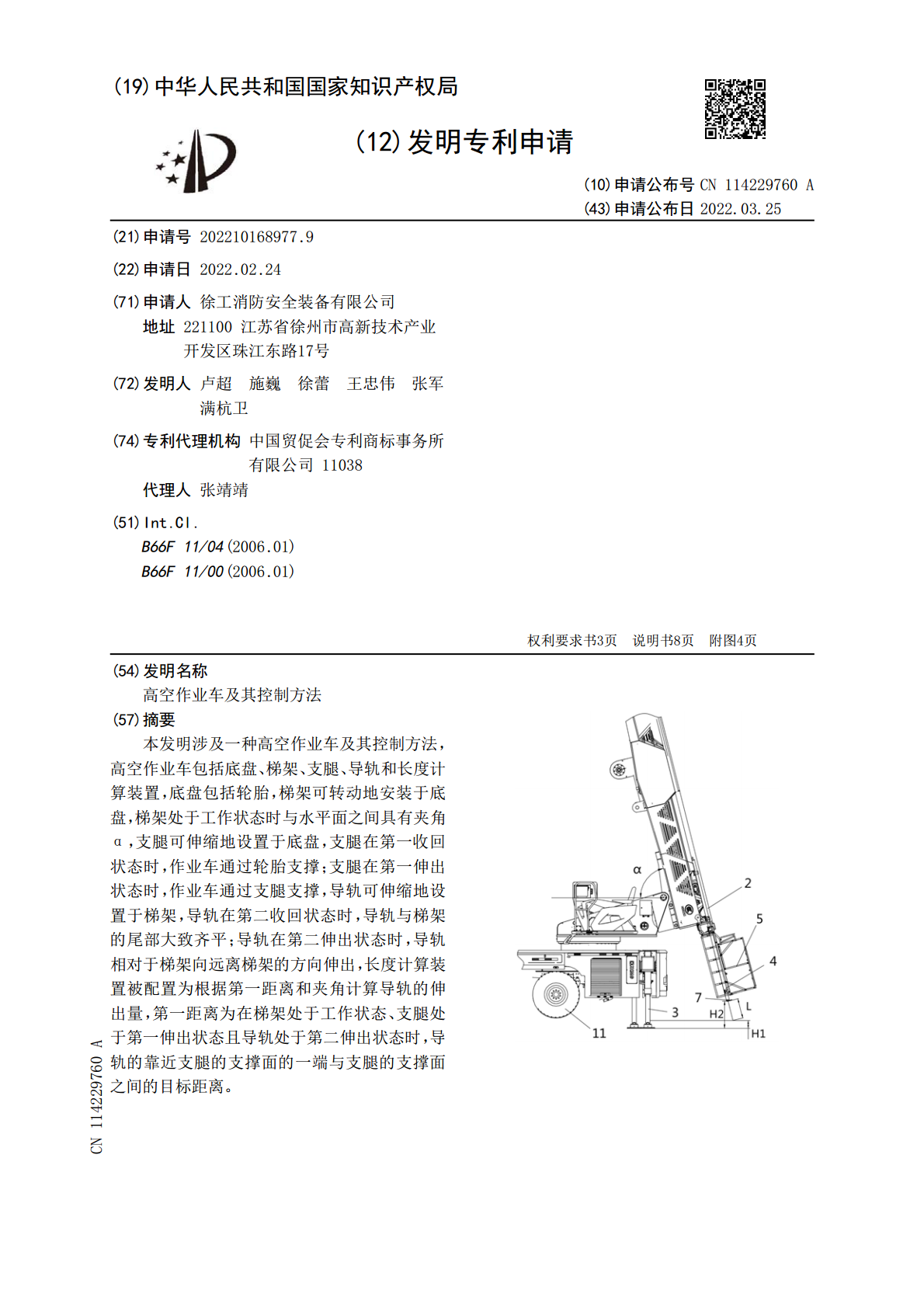
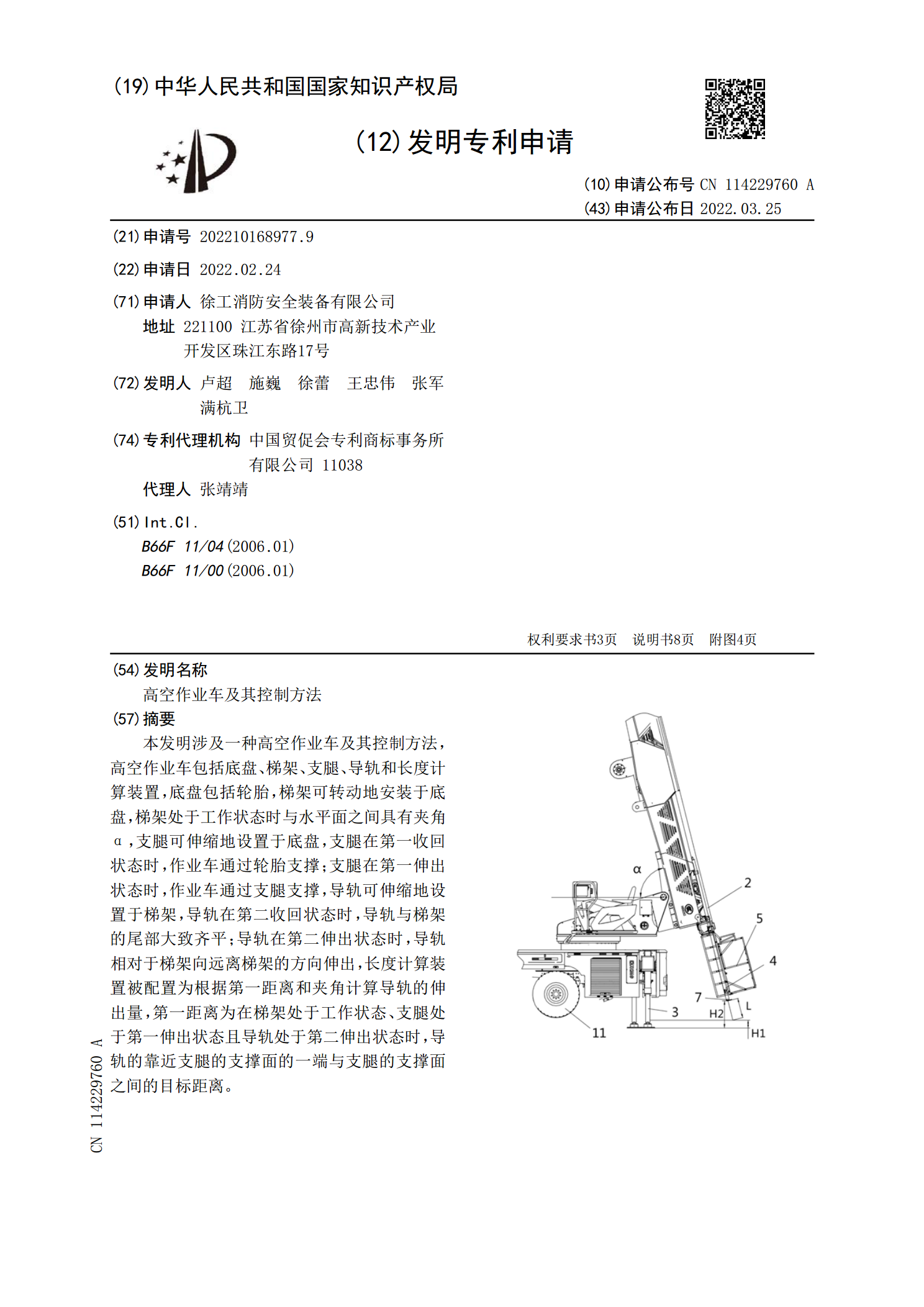
本发明涉及一种高空作业车及其控制方法,高空作业车包括底盘、梯架、支腿、导轨和长度计算装置,底盘包括轮胎,梯架可转动地安装于底盘,梯架处于工作状态时与水平面之间具有夹角α,支腿可伸缩地设置于底盘,支腿在第一收回状态时,作业车通过轮胎支撑;支腿在第一伸出状态时,作业车通过支腿支撑,导轨可伸缩地设置于梯架,导轨在第二收回状态时,导轨与梯架的尾部大致齐平;导轨在第二伸出状态时,导轨相对于梯架向远离梯架的方向伸出,长度计算装置被配置为根据第一距离和夹角计算导轨的伸出量,第一距离为在梯架处于工作状态、支腿处于第一伸出
高空作业车及其控制单元.pdf
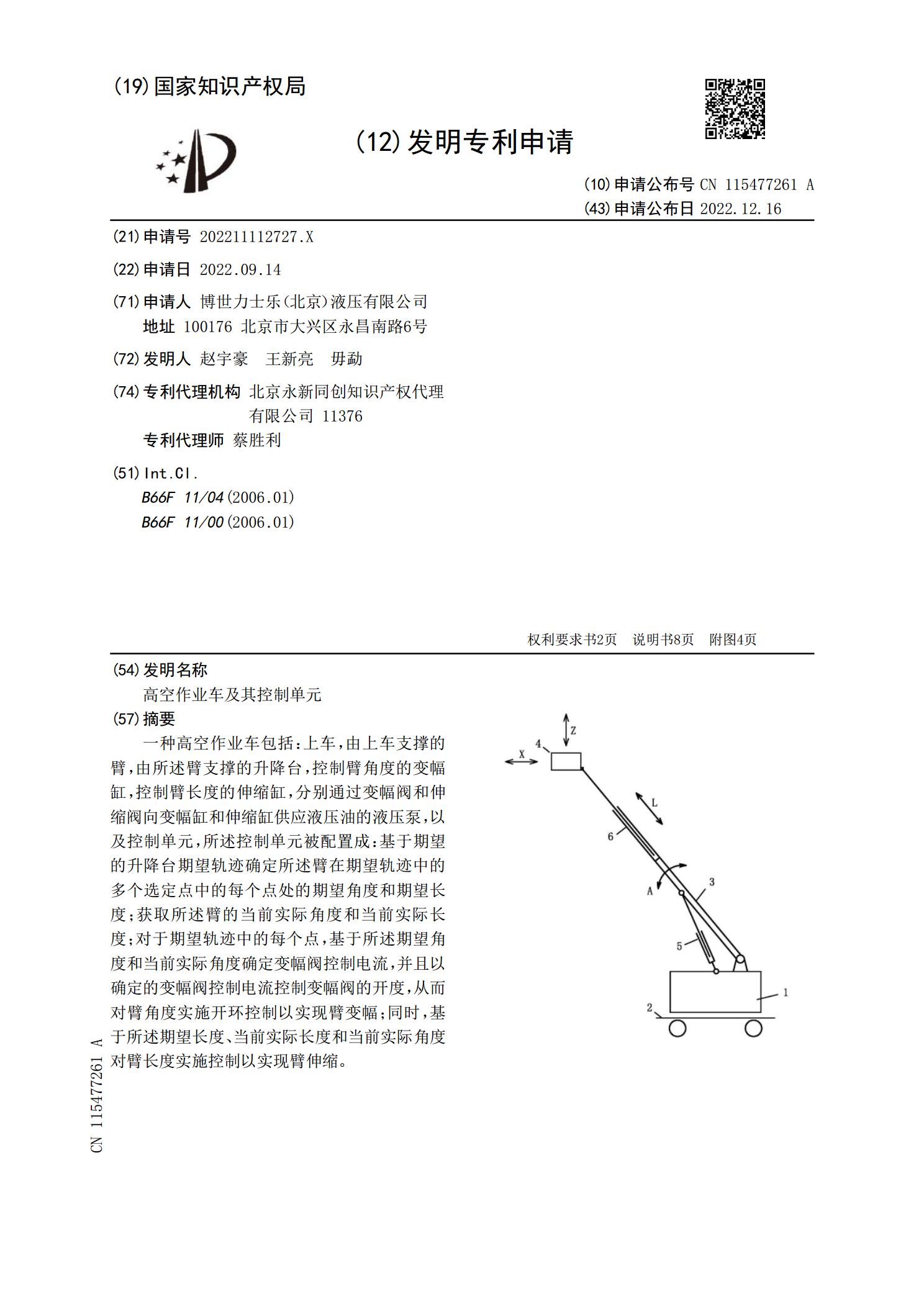
一种高空作业车包括:上车,由上车支撑的臂,由所述臂支撑的升降台,控制臂角度的变幅缸,控制臂长度的伸缩缸,分别通过变幅阀和伸缩阀向变幅缸和伸缩缸供应液压油的液压泵,以及控制单元,所述控制单元被配置成:基于期望的升降台期望轨迹确定所述臂在期望轨迹中的多个选定点中的每个点处的期望角度和期望长度;获取所述臂的当前实际角度和当前实际长度;对于期望轨迹中的每个点,基于所述期望角度和当前实际角度确定变幅阀控制电流,并且以确定的变幅阀控制电流控制变幅阀的开度,从而对臂角度实施开环控制以实现臂变幅;同时,基于所述期望长度、

一种高空作业车臂架及其工作半径的控制方法.pdf
本发明公开一种高空作业车臂架及其工作半径的控制方法,回转支承分别与转台、底盘架连接,回转减速机设置在转台上,回转减速机与回转支承连接,臂架、变幅油缸和转台三者两两相互铰接;回转编码器设置在转台上,回转编码器旋转轴的下部小齿轮与回转支承的外齿轮齿合在一起;水平倾角传感器和长度传感器安装在臂架上,控制器安装在转台上;水平倾角传感器、长度传感器和回转编码器与控制器电连接。控制器中预存了臂架工作半径R与回转角度θ的对应极限值,通过计算回转角度θ、工作半径R,控制器实时对比臂架工作半径R与回转角度θ的对应极限值,扩
高空作业车的行驶控制方法和行驶控制装置.pdf
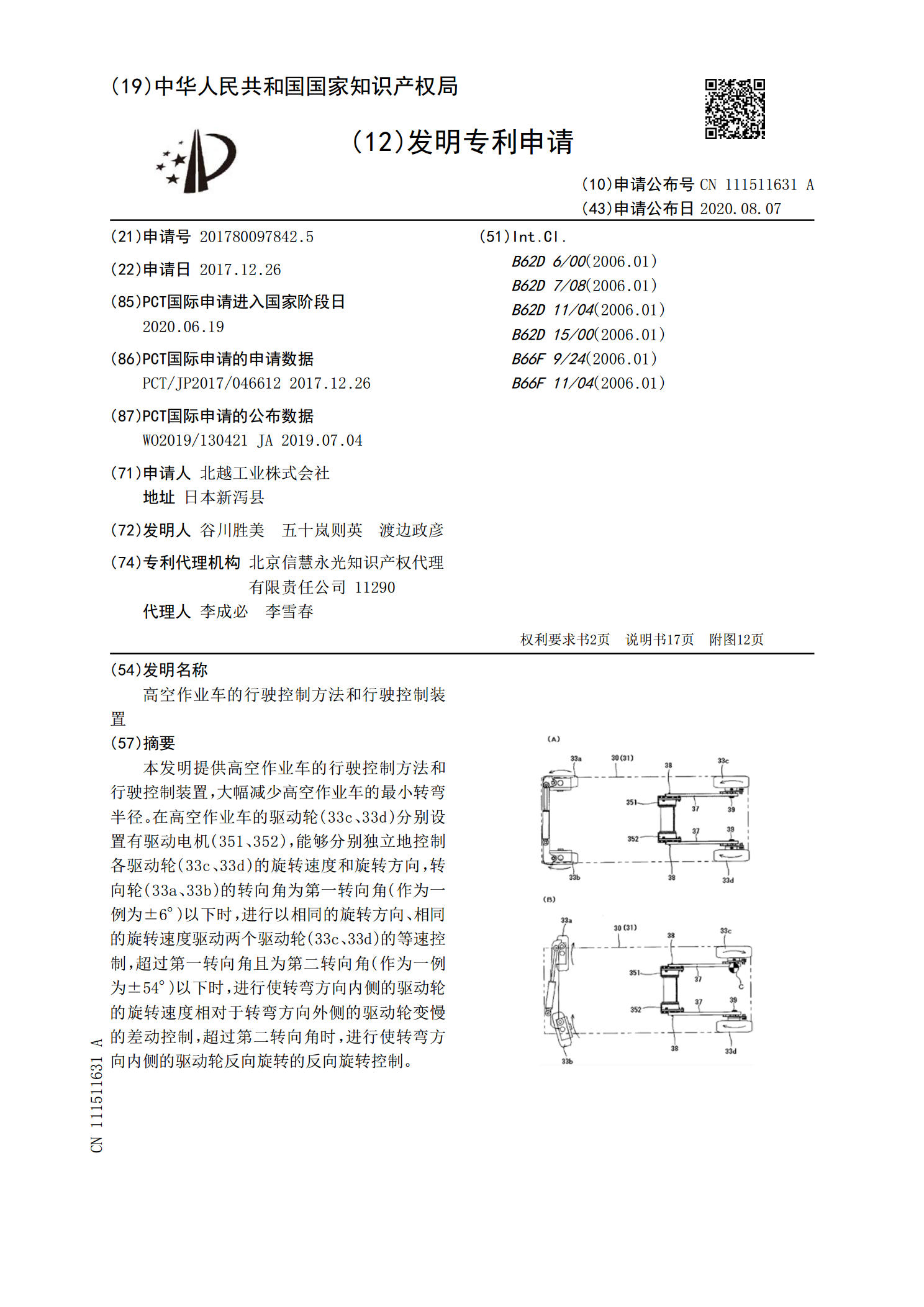
本发明提供高空作业车的行驶控制方法和行驶控制装置,大幅减少高空作业车的最小转弯半径。在高空作业车的驱动轮(33c、33d)分别设置有驱动电机(351、352),能够分别独立地控制各驱动轮(33c、33d)的旋转速度和旋转方向,转向轮(33a、33b)的转向角为第一转向角(作为一例为±6°)以下时,进行以相同的旋转方向、相同的旋转速度驱动两个驱动轮(33c、33d)的等速控制,超过第一转向角且为第二转向角(作为一例为±54°)以下时,进行使转弯方向内侧的驱动轮的旋转速度相对于转弯方向外侧的驱动轮变慢的差动控
高空作业车及其称重系统.pdf
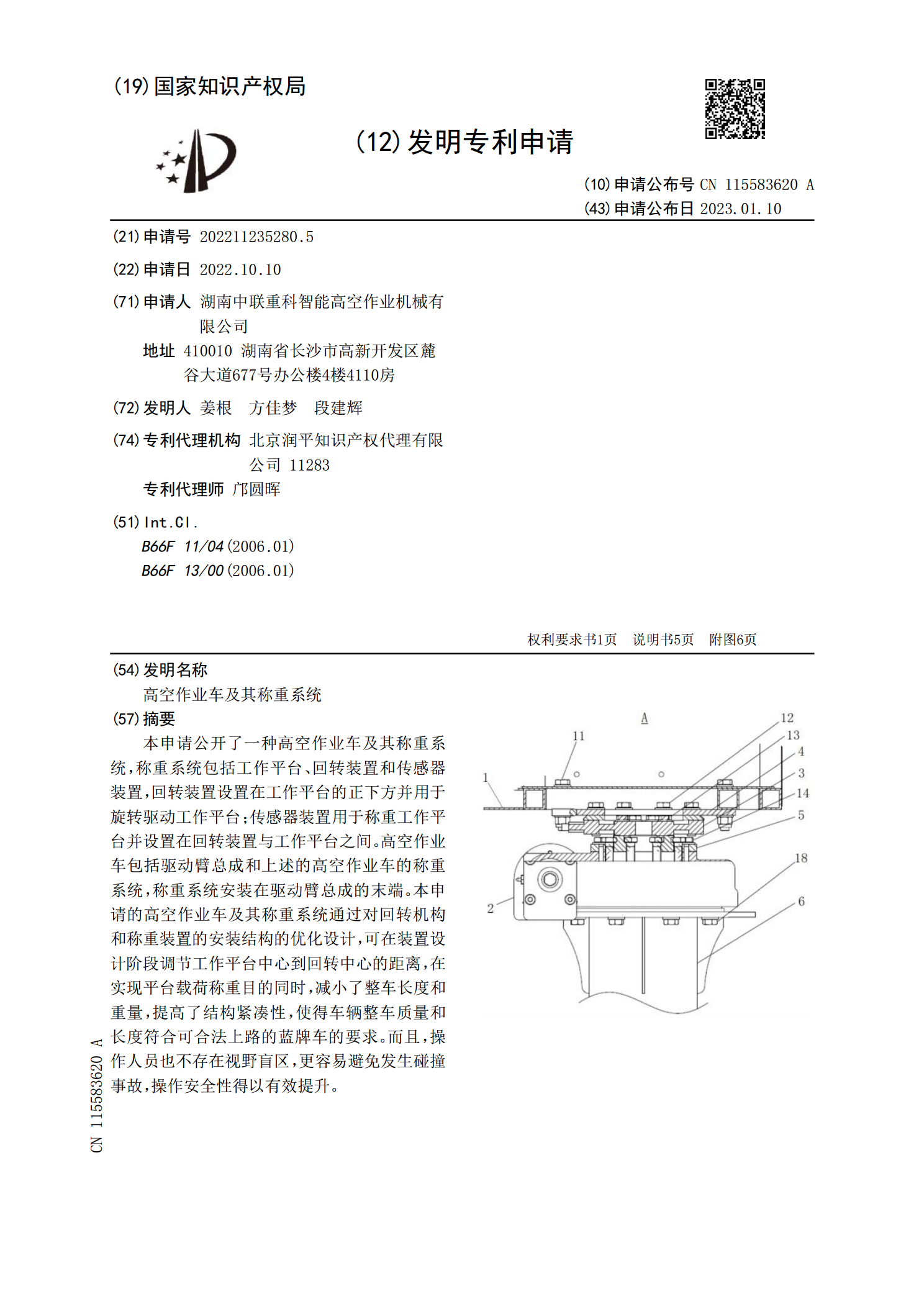
本申请公开了一种高空作业车及其称重系统,称重系统包括工作平台、回转装置和传感器装置,回转装置设置在工作平台的正下方并用于旋转驱动工作平台;传感器装置用于称重工作平台并设置在回转装置与工作平台之间。高空作业车包括驱动臂总成和上述的高空作业车的称重系统,称重系统安装在驱动臂总成的末端。本申请的高空作业车及其称重系统通过对回转机构和称重装置的安装结构的优化设计,可在装置设计阶段调节工作平台中心到回转中心的距离,在实现平台载荷称重目的同时,减小了整车长度和重量,提高了结构紧凑性,使得车辆整车质量和长度符合可合法上