
一种高空作业平台控制方法及高空作业平台.pdf

一吃****昕靓

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高空作业平台控制方法及高空作业平台.pdf
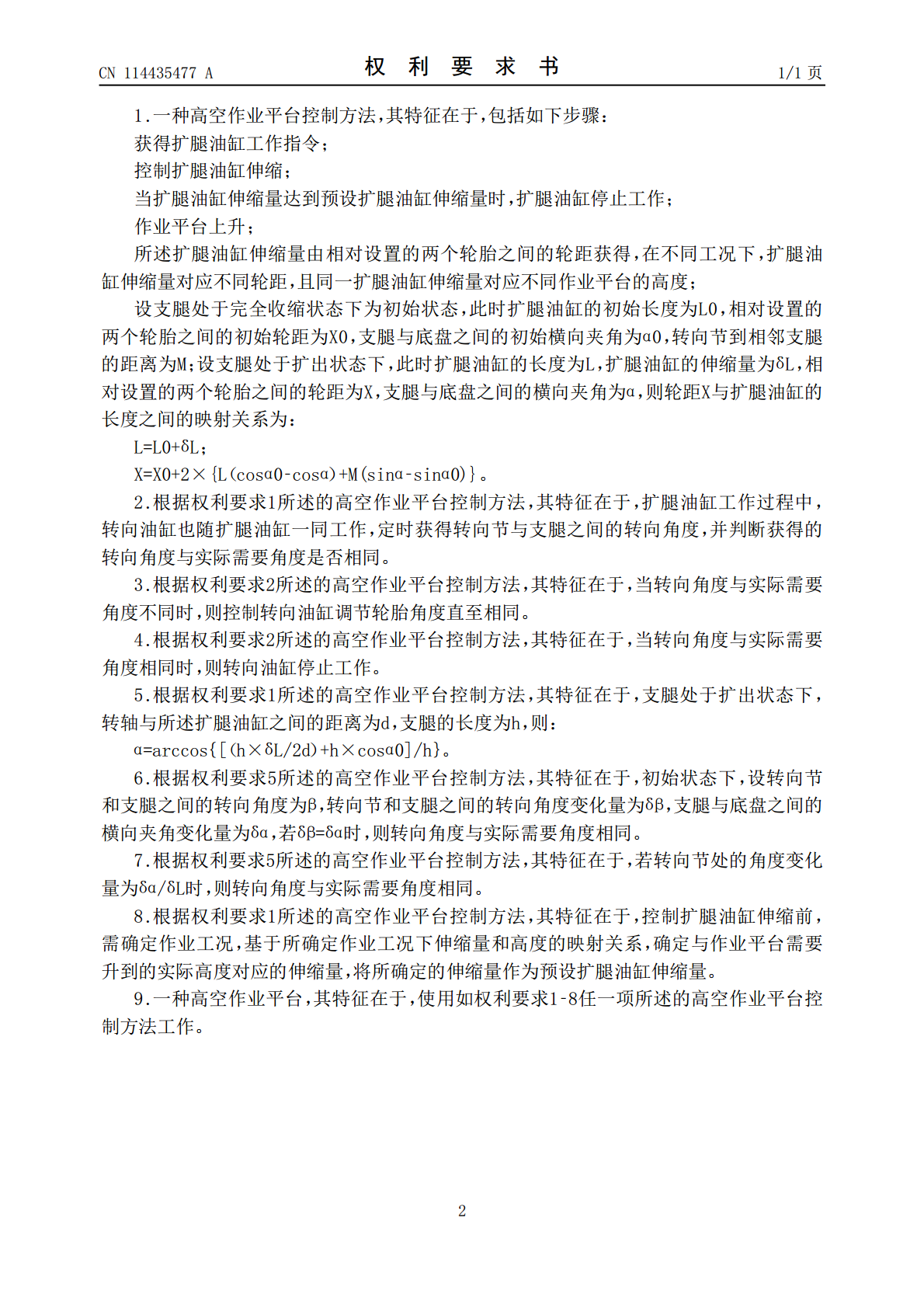
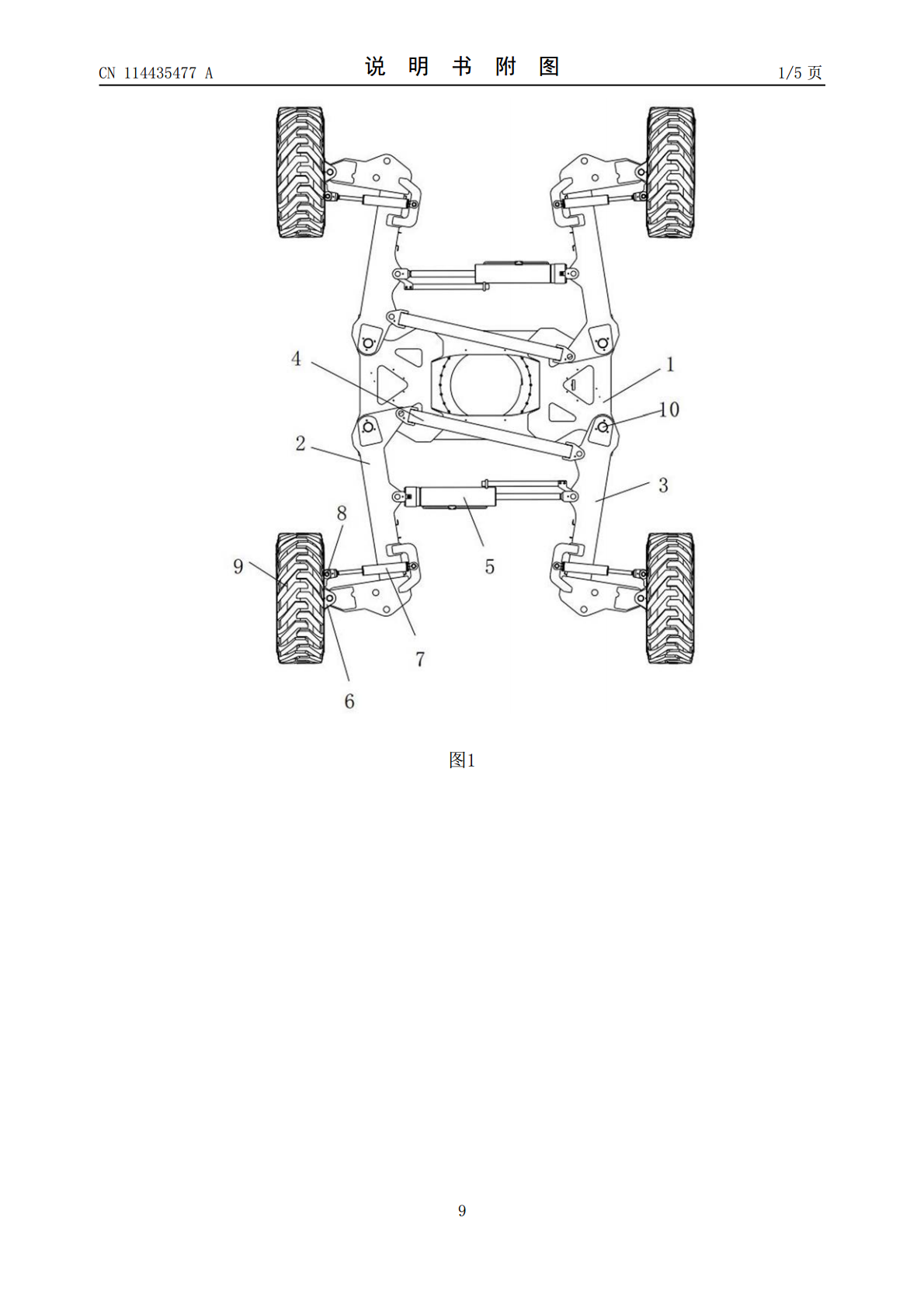
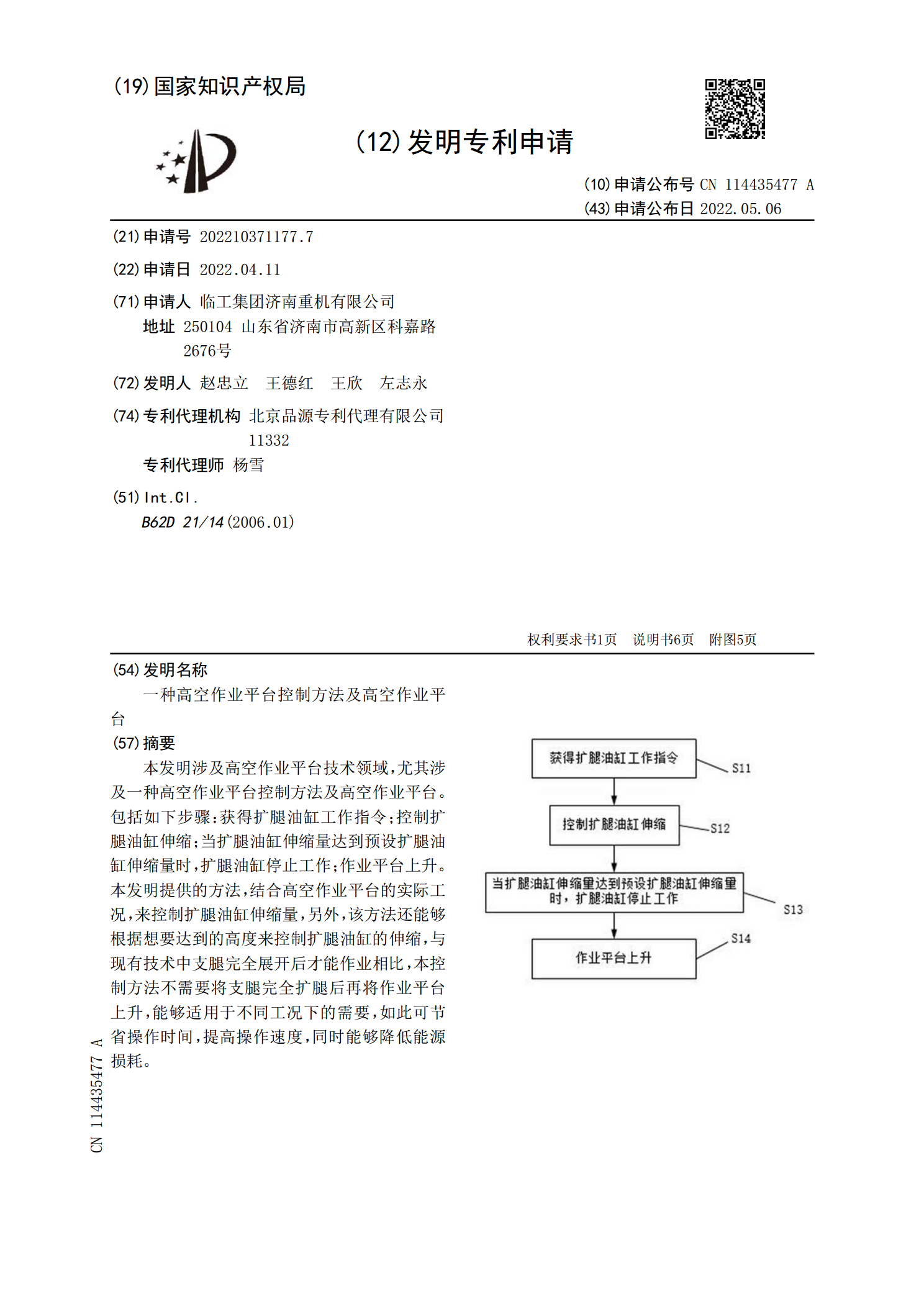
本发明涉及高空作业平台技术领域,尤其涉及一种高空作业平台控制方法及高空作业平台。包括如下步骤:获得扩腿油缸工作指令;控制扩腿油缸伸缩;当扩腿油缸伸缩量达到预设扩腿油缸伸缩量时,扩腿油缸停止工作;作业平台上升。本发明提供的方法,结合高空作业平台的实际工况,来控制扩腿油缸伸缩量,另外,该方法还能够根据想要达到的高度来控制扩腿油缸的伸缩,与现有技术中支腿完全展开后才能作业相比,本控制方法不需要将支腿完全扩腿后再将作业平台上升,能够适用于不同工况下的需要,如此可节省操作时间,提高操作速度,同时能够降低能源损耗。
用于高空作业平台的控制方法、控制器及高空作业平台.pdf
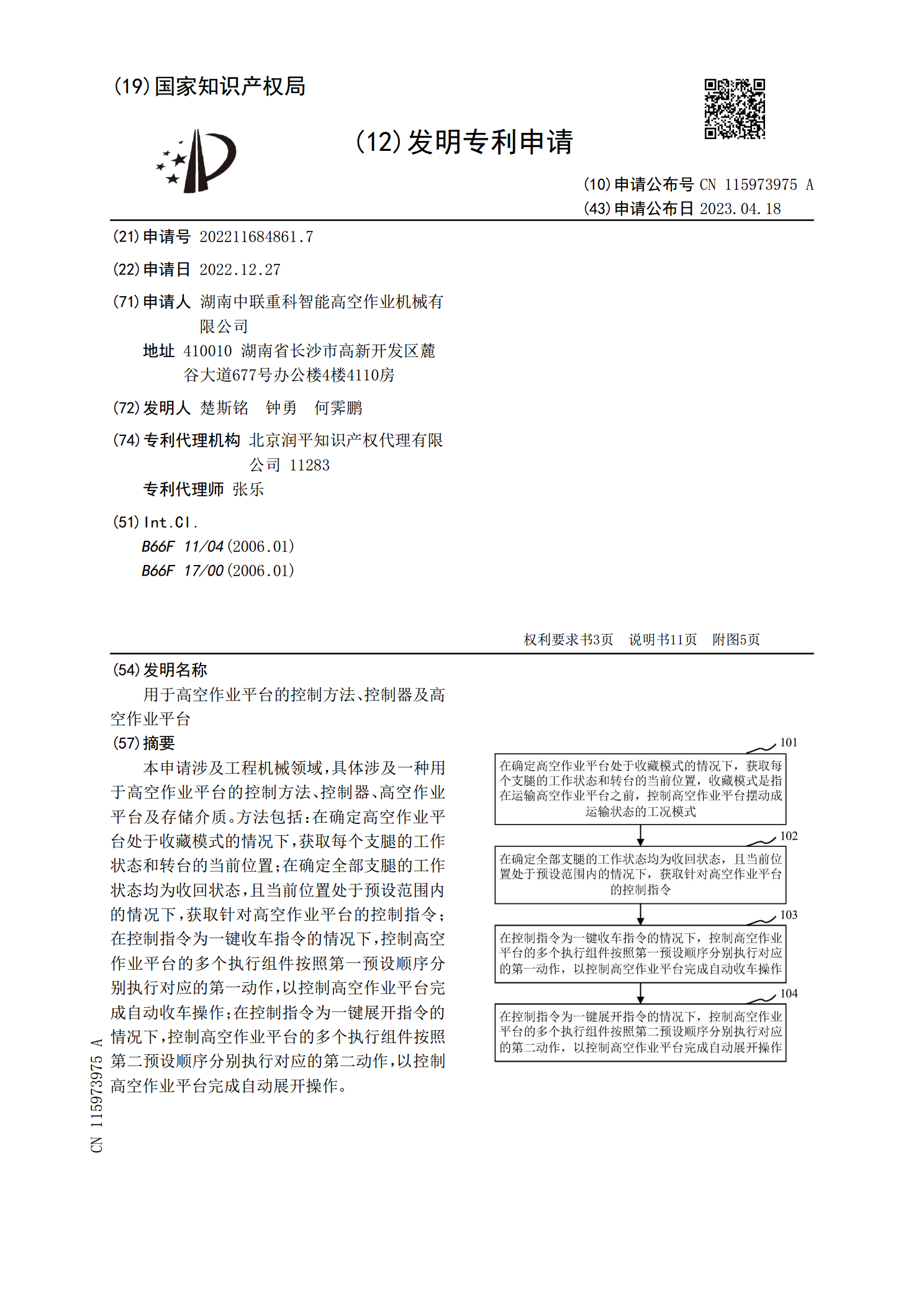
本申请涉及工程机械领域,具体涉及一种用于高空作业平台的控制方法、控制器、高空作业平台及存储介质。方法包括:在确定高空作业平台处于收藏模式的情况下,获取每个支腿的工作状态和转台的当前位置;在确定全部支腿的工作状态均为收回状态,且当前位置处于预设范围内的情况下,获取针对高空作业平台的控制指令;在控制指令为一键收车指令的情况下,控制高空作业平台的多个执行组件按照第一预设顺序分别执行对应的第一动作,以控制高空作业平台完成自动收车操作;在控制指令为一键展开指令的情况下,控制高空作业平台的多个执行组件按照第二预设顺序
一种高空作业平台支腿移动方法及高空作业平台.pdf
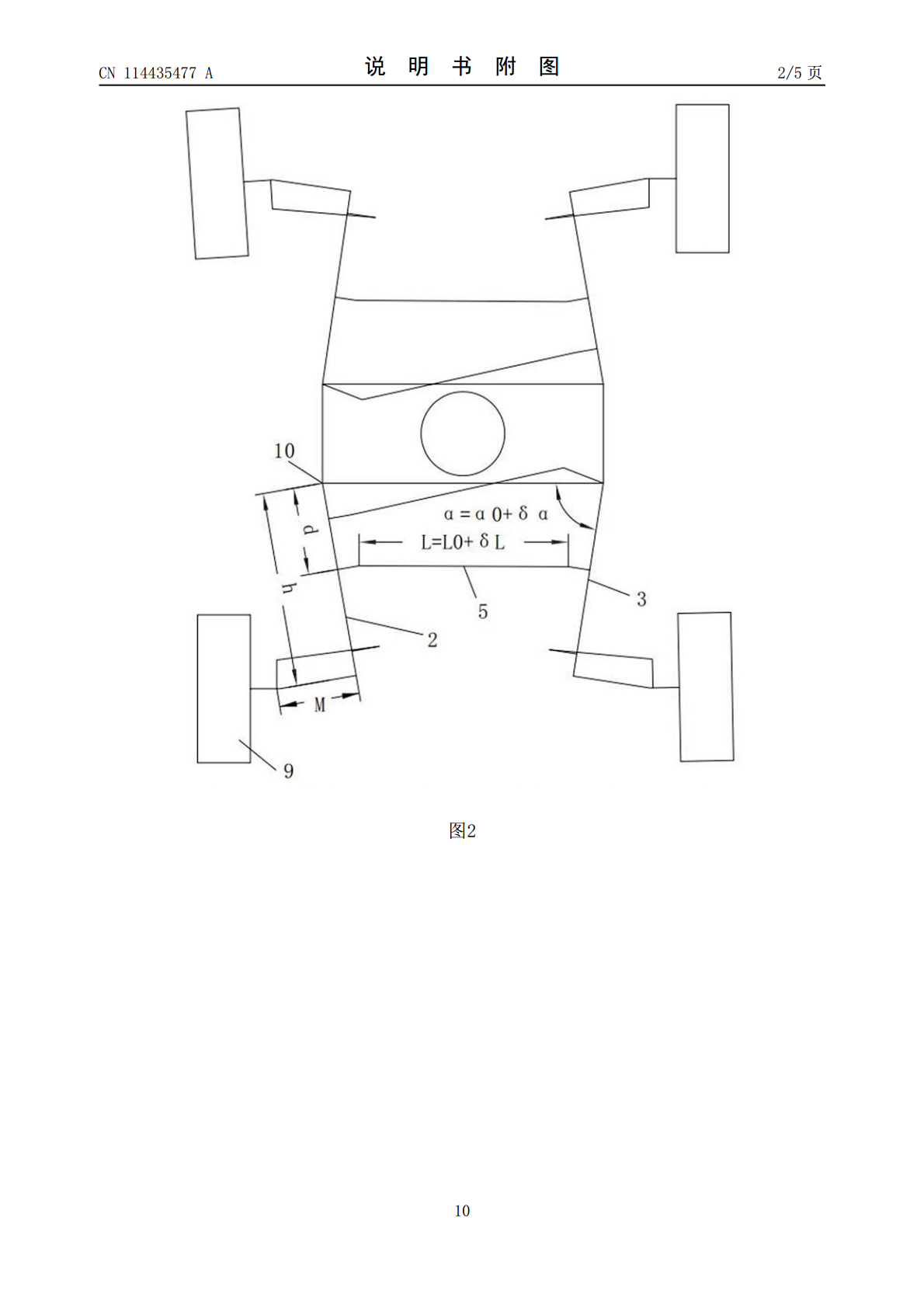
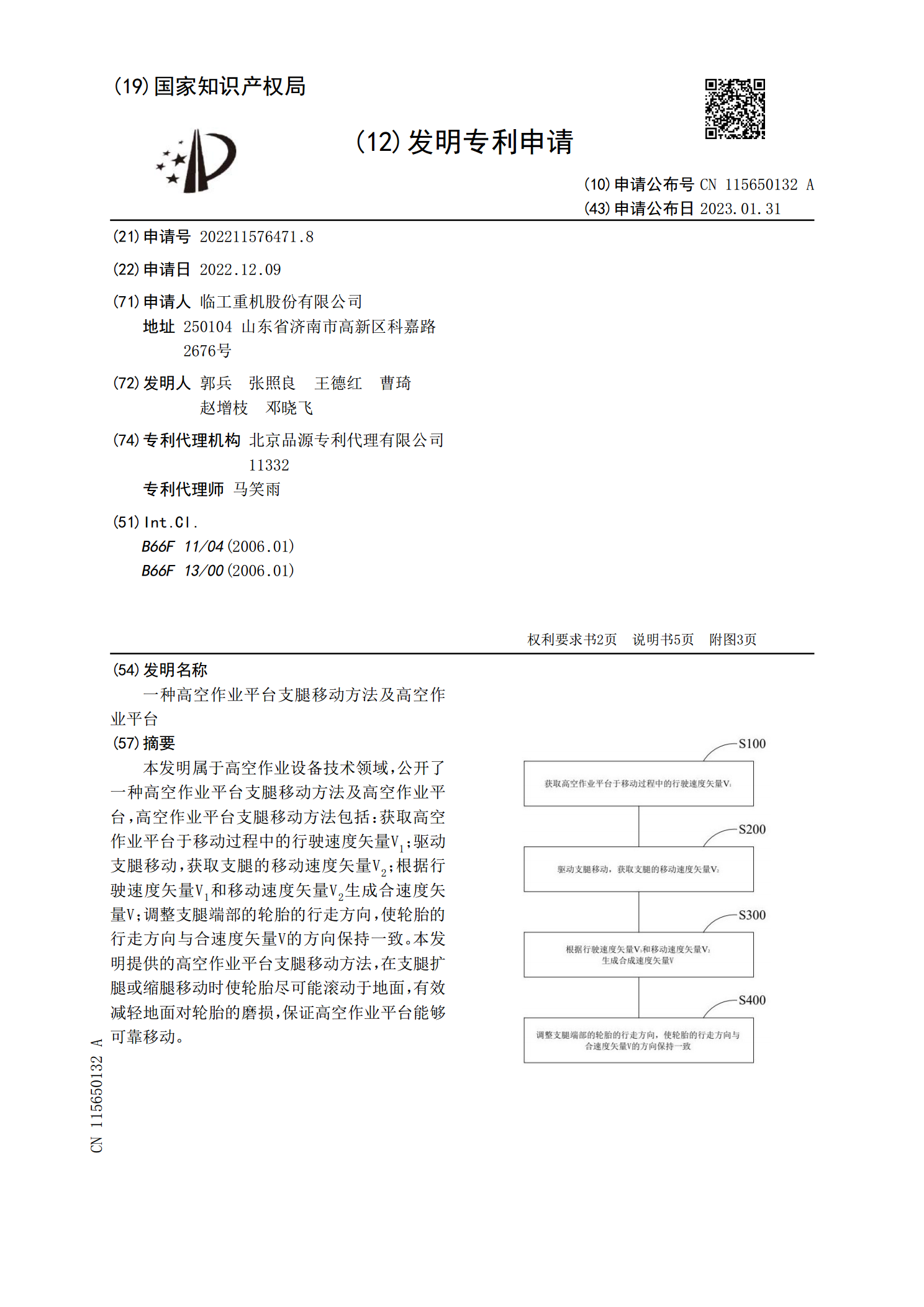
本发明属于高空作业设备技术领域,公开了一种高空作业平台支腿移动方法及高空作业平台,高空作业平台支腿移动方法包括:获取高空作业平台于移动过程中的行驶速度矢量V<base:Sub>1</base:Sub>;驱动支腿移动,获取支腿的移动速度矢量V<base:Sub>2</base:Sub>;根据行驶速度矢量V<base:Sub>1</base:Sub>和移动速度矢量V<base:Sub>2</base:Sub>生成合速度矢量V;调整支腿端部的轮胎的行走方向,使轮胎的行走方向与合速度矢量V的方向保持一致。本发明提
一种高空作业平台的底盘及高空作业平台.pdf
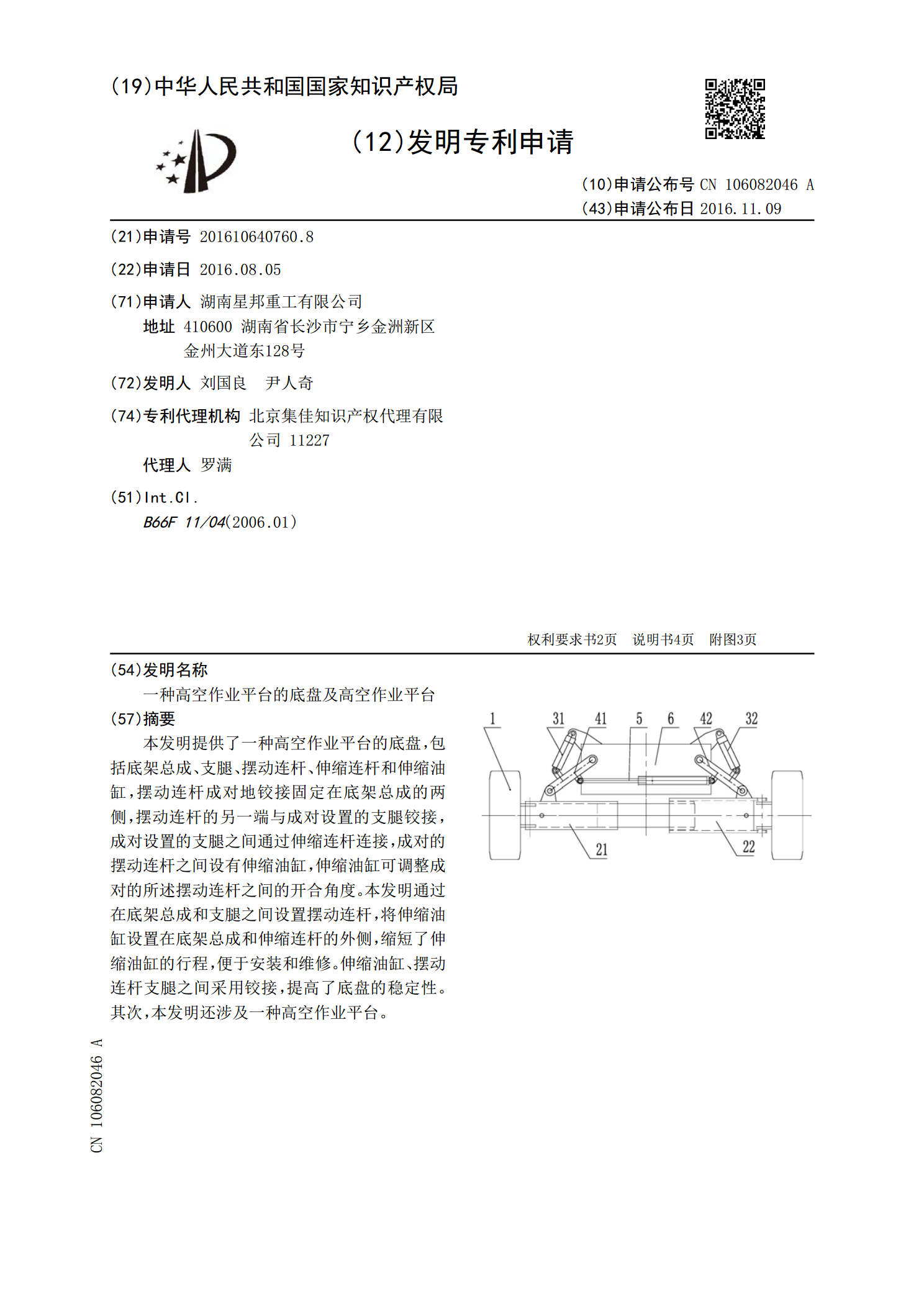
本发明提供了一种高空作业平台的底盘,包括底架总成、支腿、摆动连杆、伸缩连杆和伸缩油缸,摆动连杆成对地铰接固定在底架总成的两侧,摆动连杆的另一端与成对设置的支腿铰接,成对设置的支腿之间通过伸缩连杆连接,成对的摆动连杆之间设有伸缩油缸,伸缩油缸可调整成对的所述摆动连杆之间的开合角度。本发明通过在底架总成和支腿之间设置摆动连杆,将伸缩油缸设置在底架总成和伸缩连杆的外侧,缩短了伸缩油缸的行程,便于安装和维修。伸缩油缸、摆动连杆支腿之间采用铰接,提高了底盘的稳定性。其次,本发明还涉及一种高空作业平台。
一种高空作业平台控制电路及控制方法.pdf
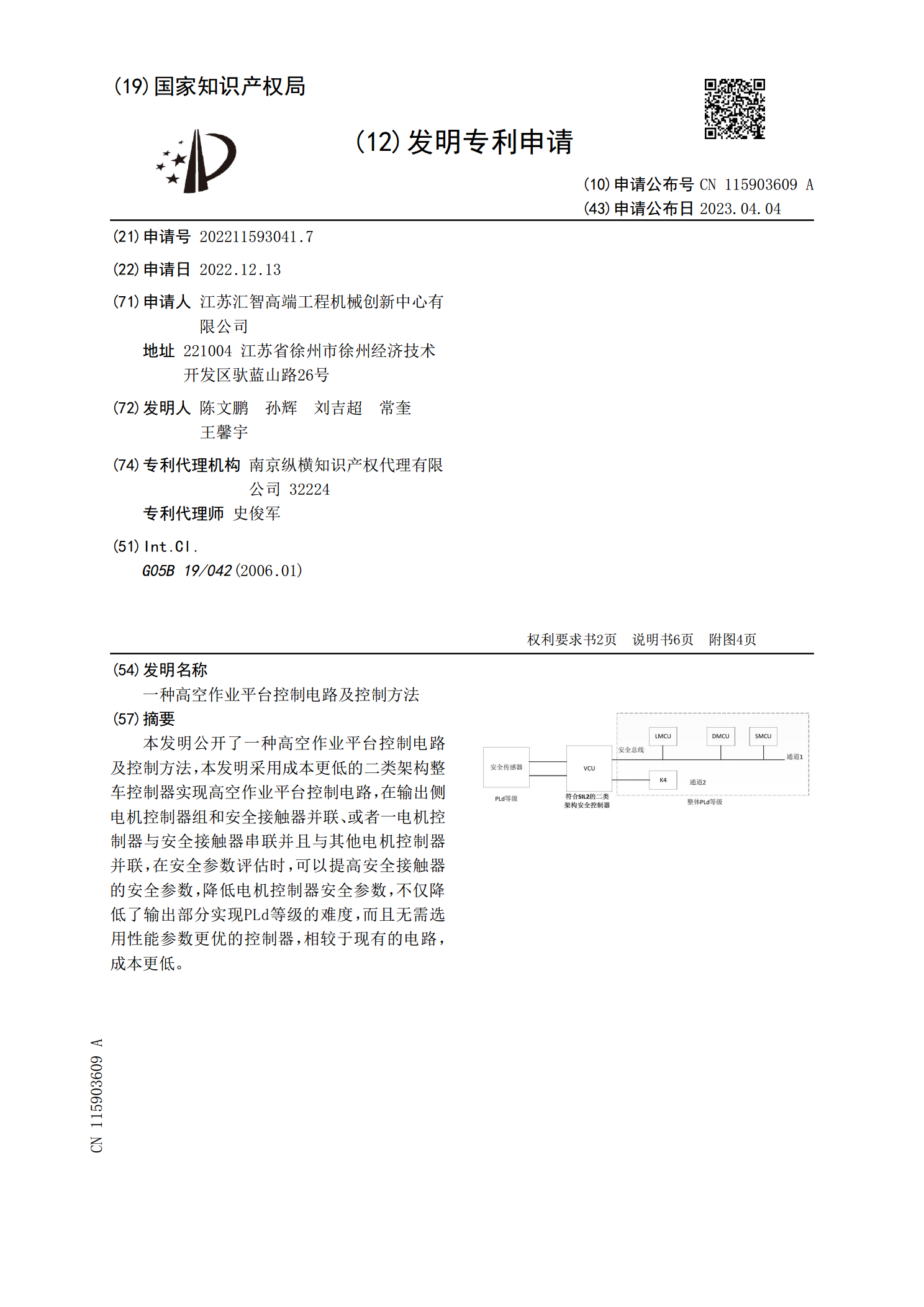
本发明公开了一种高空作业平台控制电路及控制方法,本发明采用成本更低的二类架构整车控制器实现高空作业平台控制电路,在输出侧电机控制器组和安全接触器并联、或者一电机控制器与安全接触器串联并且与其他电机控制器并联,在安全参数评估时,可以提高安全接触器的安全参数,降低电机控制器安全参数,不仅降低了输出部分实现PLd等级的难度,而且无需选用性能参数更优的控制器,相较于现有的电路,成本更低。