
一种电动缸快速展车调平控制方法和系统.pdf

听容****55

1/9

2/9
3/9

4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电动缸快速展车调平控制方法和系统.pdf
本发明提供了一种电动缸快速展车调平控制方法和系统,解决现有展车调平控制过程不适应电动缸的技术问题。方法包括:获取展车前车辆后梁的初始水平角度,根据初始水平角度设置电动缸驱动支腿的伸出长度、伸出同步状态和伸出速度的进给数据形成粗调过程;在粗调过程完成时判断当前水平度是否满足调平精度,不满足则根据当前水平度设置进给数据形成精调过程;判断精调过程中的水平度符合调平精度时,锁定支腿完成展车调平。通过水平角度测量反馈建立电动缸驱动的闭环控制过程,形成递进的粗调和精调过程,避免了展车调平过程受其他控制因素影响形成反复

一种展车调平液压系统、车辆及其展车调平方法.pdf
本发明公开了一种展车调平液压系统,包括油箱、展车调平油路、供油油路和开锁油路,展车调平油路中的第一前支腿油缸和第二前支腿油缸均采用双作用型油缸,第一后支腿油缸和第二后支腿油缸均采用过盈内锁紧型油缸,供油油路包括变量柱塞泵,变量柱塞泵的进油口与油箱连接,变量柱塞泵的出油口分别与第一前支腿油缸、第二前支腿油缸、第一后支腿油缸和第二后支腿油缸连接并通过回油管与油箱连接,开锁油路包括定量齿轮泵,定量齿轮泵的进油口与油箱连接,定量齿轮泵的出油口分别与第一后支腿油缸和第二后支腿油缸的开锁腔连接。本发明具有展车调平速度
消防车的调平控制方法和系统.pdf
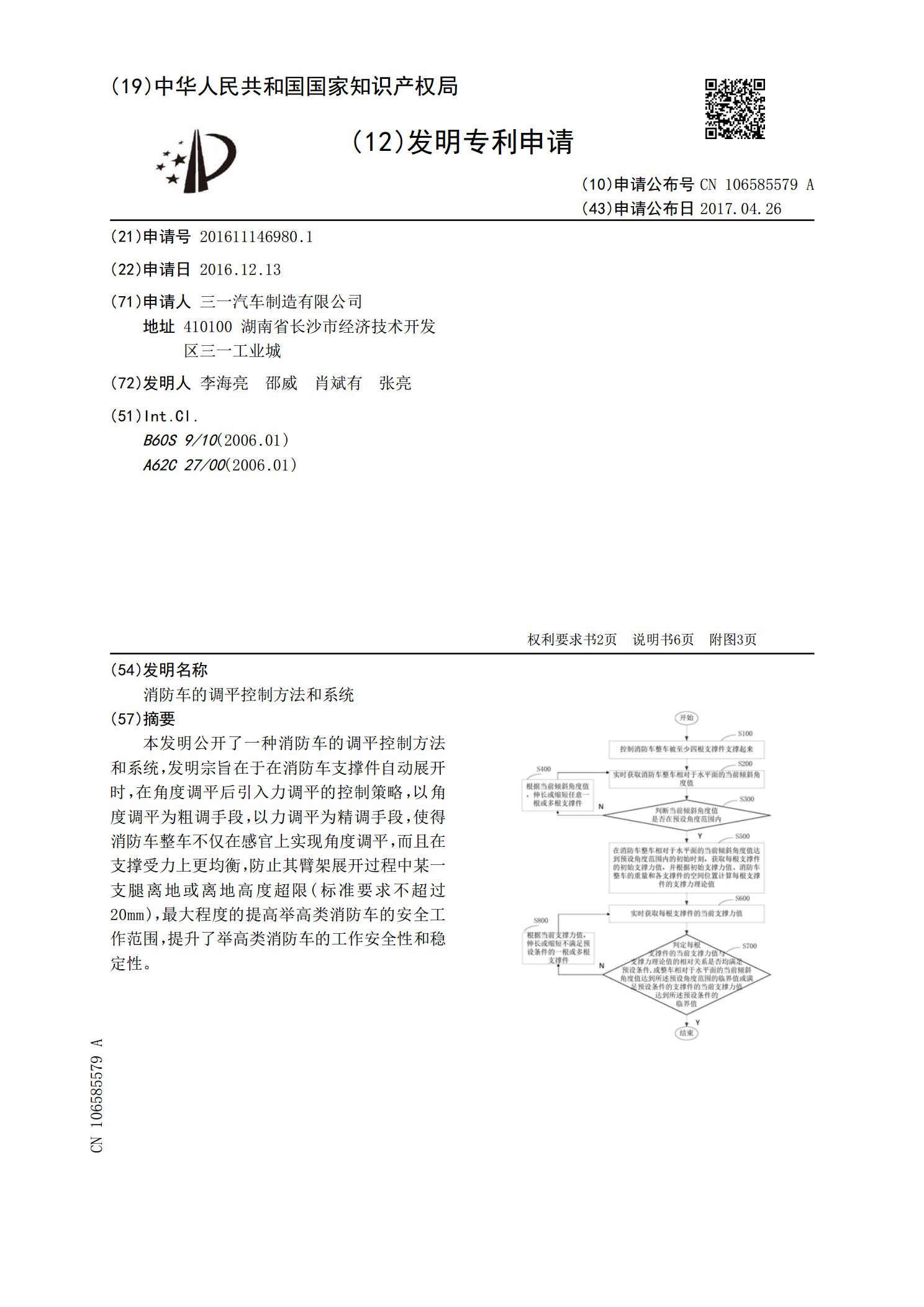
本发明公开了一种消防车的调平控制方法和系统,发明宗旨在于在消防车支撑件自动展开时,在角度调平后引入力调平的控制策略,以角度调平为粗调手段,以力调平为精调手段,使得消防车整车不仅在感官上实现角度调平,而且在支撑受力上更均衡,防止其臂架展开过程中某一支腿离地或离地高度超限(标准要求不超过20mm),最大程度的提高举高类消防车的安全工作范围,提升了举高类消防车的工作安全性和稳定性。

消防车的调平控制方法和系统.pdf
本发明公开了一种消防车的调平控制方法和系统,其发明宗旨是在消防车支撑件自动展开时,在角度调平后引入力调平的控制策略,以角度调平为粗调手段,以力调平为精调手段,使得消防车整车不仅在感官上实现角度调平,而且在支撑受力上更均衡,防止其臂架展开过程中某一支腿离地或离地高度超限(标准要求不超过20mm),最大程度的提高举高类消防车的安全工作范围,提升了举高类消防车的工作安全性和稳定性。

一种电动缸支腿、车辆及快速调平方法.pdf
本发明涉及一种电动缸支腿、车辆及快速调平方法,电动缸支腿包括齿轮箱、减速器、电机和电动缸,电机、减速器和齿轮箱依次固定连接,减速器的输出轴上设有主齿轮;电动缸包括与齿轮箱固定连接的缸筒,缸筒中安装有丝杠,丝杠上设有与主齿轮啮合的副齿轮,丝杠上设有螺母,螺母与缸筒之间设有导向机构,螺母的下侧固定有活塞杆,活塞杆的下端设有支撑组件;还包括连接座和连接套,连接座通过螺钉固定在缸筒上,连接座和缸筒之间安装有承载键,连接套由前至后套在缸筒上并使其左右端分别与连接座固定连接。电动缸支腿具有结构紧凑、控制方便、稳定性好